配件相关问题
Q:630的roboflow如何使用电动夹爪教程:
A:电动夹爪一定要初始化确保灯位蓝色才能正常使用,闪烁红灯这是不正常的 https://docs.google.com/document/d/1CVKVcCJSCgD87TlGKCsp2q1sG6oHwWit/edit
Q:630&600的电动夹爪如何使用?
第一步更新pymycobot为3.6.3
pip3 install pymycobot==3.6.3
import time
from pymycobot import Phoenix
#Phoenix和roboflow是冲突的只能使用一个,使用roboflow就不能使用phoneix,反之亦然
#ip地址要填自己的,debug不是必填项
#mg = Pro630("192.168.1.5",115200,debug=True)
mg = Phoenix()
#机械臂上电
mg.start_robot()
time.sleep(0.5)
mg.tool_set_gripper_electric_init()
time.sleep(0.5)
while True:
mg.tool_set_gripper_electric_open()
time.sleep(3)
mg.tool_set_gripper_electric_close()
time.sleep(3)
Q:600/630使用pro自适应夹爪?
- A: 在启动机械臂之前,需要将夹爪手动拉到最大 启动机械臂后,按图所示点开,测试夹爪是否正常工作: tool_out0:闭合夹爪 tool_out1:张开夹爪
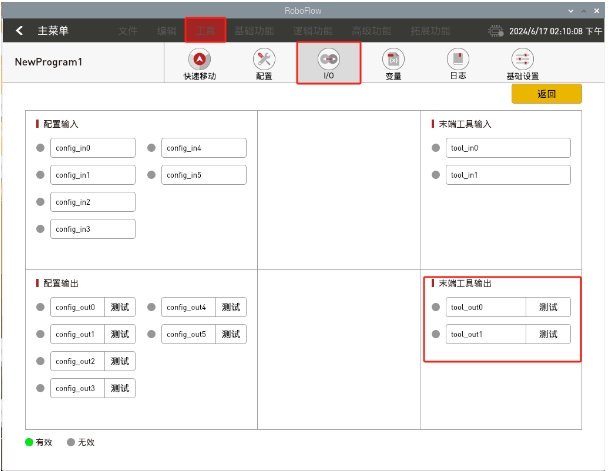
首先,点击tool_out0旁边的测试,测试夹爪是否张开,若点击后夹爪正常张开则正常,再次点击tool_out0关闭 点击tool_out1旁边的测试,测试夹爪是否闭合,若点击后夹爪正常张开则正常,再次点击tool_out1关闭
Q: 使用RoboFlow编写程序时如何控制夹爪?
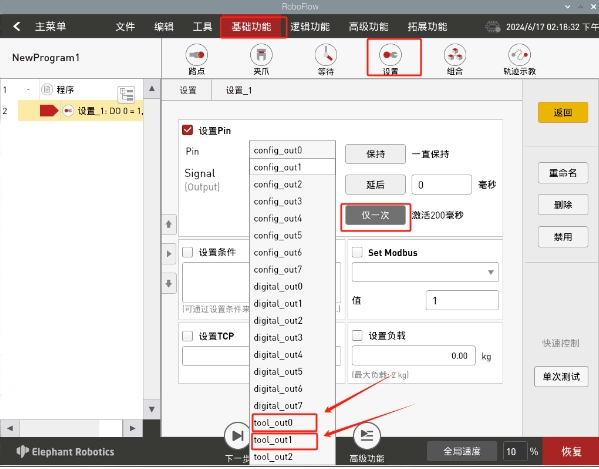
如图所示,选择基础功能--设置,选择末端工具引脚输出,选择仅一次,可控制夹爪的一次闭合/打开。
Q: 使用RoboFlow能否使用透传模式控制夹爪?
- A: 不能。RoboFlow目前只支持IO模式控制全开全闭,使用透传模式需要用python或串口助手控制机械臂。
Q;如何在p600上使用摄像头法兰?
A:可以参考此案例:https://blog.csdn.net/qq_29225913/article/details/101077821
Q:关于夹持物体与机械臂运动之间有什么需要注意的吗?
当负载 > 500g时,速度需要低于 50%。