软件问题
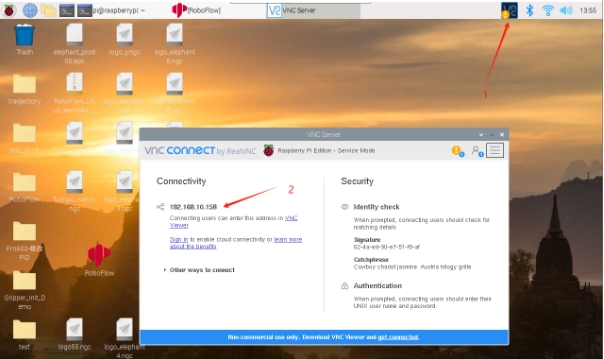
Q:如何查看机械臂的IP地址、连接VNC?
WIFI连接:
连接wifi后,将鼠标放置到wifi图标上
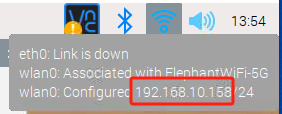
或者点击右上角图标(如图所示)后2所指向的位置查看
Q: 有p600将笛卡尔坐标系换算成六自由度的角度坐标的公式吗
- A: 没有,但是可以用send_coords移动到目标位置,然后读当前关节角度
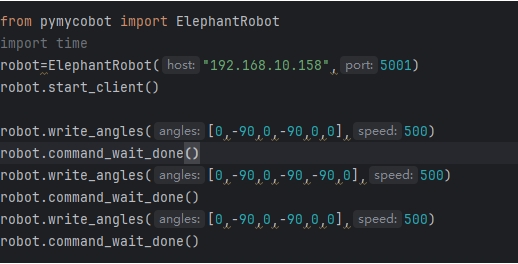
Q:使用程序控制机械臂时,无法读取机械臂角度或坐标,执行第一个运动指令后无法继续控制机械臂运动怎么办?
- A: 可能是由于编写程序控制机械臂时没有添加延时或等待完成指令。使用python控制时可添加command_wait_done(),使机械臂完成上一步运动再往下执行
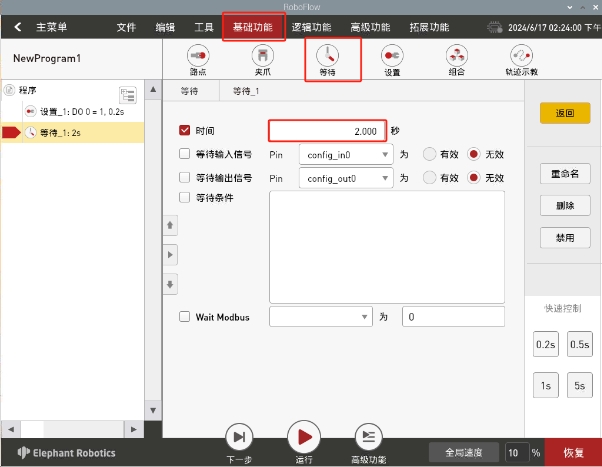
使用RoboFlow时,可以添加延时确保机械臂完成运动后再执行下一步命令:
机械臂运动后,command_wait_done()返回-1是为什么?
- A: 是由于机械臂运动的时间过长,若运行时间超过1分钟,command_wait_done()则会返回-1
解决方法:替换RoboFlow版本为:630的roboflow最新版本和更新教程:
A:关闭roboflow,然后使用U盘将文件复制到树莓派上,并按照视频进行操作 视频: https://drive.google.com/file/d/1KD1VxhzFYXEFF-3paO-ntMfGQMvjjLc2/view?usp=sharing 文件: https://drive.google.com/file/d/1lV2fTM-rNeZbccjJInpbKVhSzSXJGf4c/view?usp=sharing
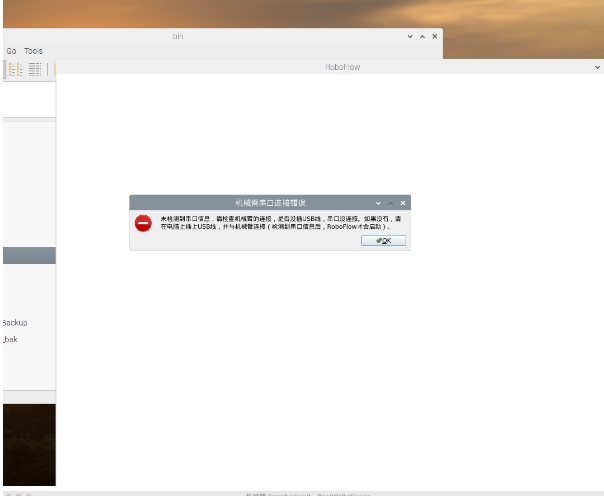
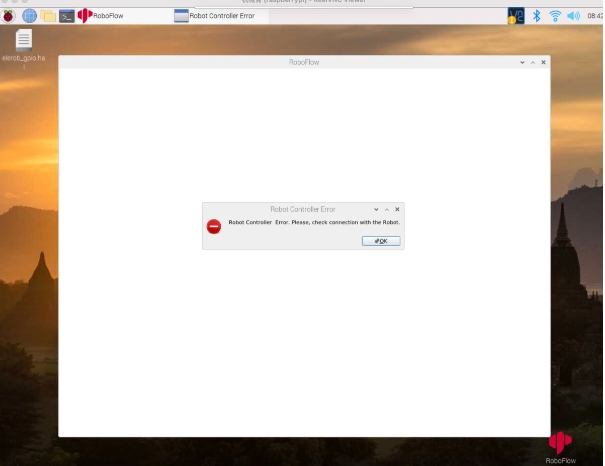
启动机械臂报错是为什么?
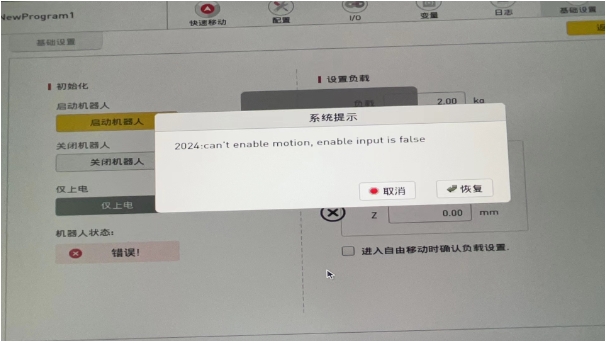
若出现以上报错:
- 检查急停是否处于释放状态,若没有,需要将急停旋钮往顺时针拧,使其弹起。
- 若急停处于释放状态,检查急停与机械臂的连接是否松动,可将连接按紧。
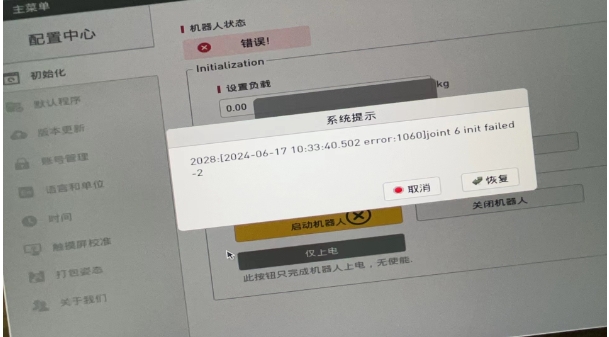
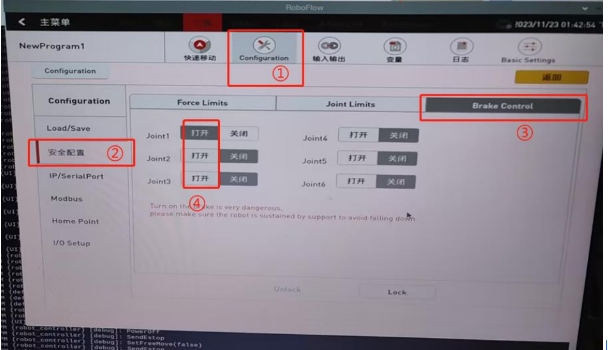
若出现以上报错: 检查系统提示的关节是否到达限位,需要断电将关节调整至零位。 如果是456关节超限,请按下急停开关,将456关节移动回到正常姿态后再启动机器人 如果是123关节超限,可按照下面的步骤将超限的关节姿态调整回来:
① 在roboflow中进入配置中心,在初始化栏点击仅上电 ② 点击开始编程,进入配置栏,选择安全配置,依次打开 1,2,3 关节的刹车(如仅某一关节超限,打开对应的超限关节即可,不必123刹车全打开)。 ③ 打开刹车后关节是可手动移动的,请手动调整关节到正常姿态,调整结束之后再关闭刹车 ④ 在roboflow重启机器人即可,后续注意关节姿态不要超限
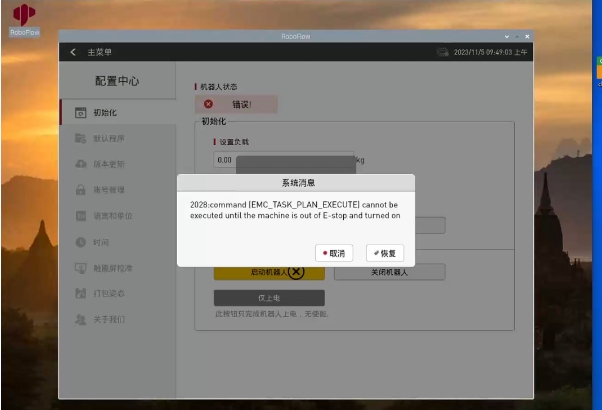
若出现以上报错: 关闭Roboflow,打开命令行输入elerob -l
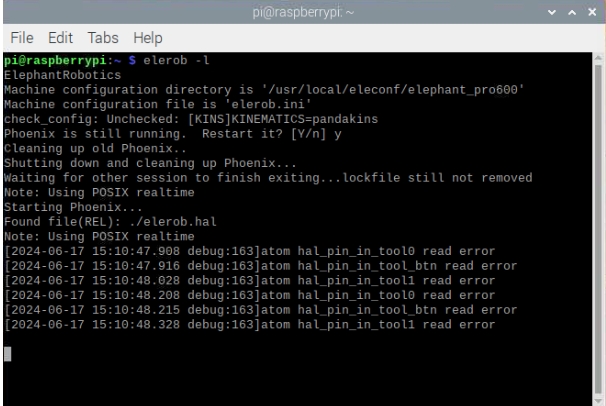
再次启动RoboFlow可解决问题
Q:600两个关节同时运动后的时候,出现运动速度很快的情况,怎么处理?
A:关于你提到的这个关节1在0和0.0001的情况下,J4运动速度不一致问题请参考下面的解释 首先这个现象是正常的 你设定的这两组角度值中,J1的变化非常小,而J4的运动范围相对较大,当这组指令下发的时候,机械臂内部电机有一个同步执行机制,这意味着两个点位之间,J1前后运动的时间和J4关节前后运动的时间相同,由于J1的关节角度变化过小,运行时间自然也相对较短,这就导致了同步执行的情况下,J4关节需要在同样相对较短的运动时间内完成角度相对较大变化,这就导致了J4的速度较快的结果 为了如果你想将机器的运行速度调节到比较慢的状态,那么我们建议你在仅需要控制一个关节的情况下,使用控制单个关节的API: write_angle 如果你想控制多个关节同时运动的,请注意使用write_angles尽量让不同关节之间的角度差值缩小一点,像J1的0变化到0.00001,差值为0,而J4关节的-150到,-100差值为40,这个相差实在太大了,如果你将J1的变化更改成0到100,这个运动速度基本是正常的,不会太快,你可以测试看看
Q:630的roboflow最新版本和更新教程:
- A:关闭roboflow,然后使用U盘将文件复制到树莓派上,并按照视频进行操作 视频: https://drive.google.com/file/d/1N_lDCe4H-Oyy0yGGVttszHlmmVVN-K94/view?usp=sharing 文件(2024.10.10): https://drive.google.com/file/d/1h6UIe9G9Mum_dutInfaqH_oVjJHSrqn6/view?usp=sharing
Q:P600在按下急停之后,无法继续使用python进行控制,这个如何处理?
- A:正常情况下在按下急停仍然可使用python进行控制,无法控制的原因为没有使用power_off()给P600彻底断电,在启动机器人前添加power_off()即可
Q:600运行超限后机械臂报错无法继续移动的情况下如何处理?
- A:如果是456关节超限,请按下急停开关,将456关节移动回到正常姿态后再启动机器人 如果是123关节超限,可按照下面的步骤将超限的关节姿态调整回来
①在roboflow中进入配置中心,在初始化栏点击仅上电
②点击开始编程,进入配置栏,选择安全配置,依次打开 1,2,3 关节的刹车(如仅某一关节超限,打开对应的超限关节即可,不必123刹车全打开)。
③打开刹车后关节是可手动移动的,请手动调整关节到正常姿态,调整结束之后再关闭刹车
④在roboflow重启机器人即可,后续注意关节姿态不要超限
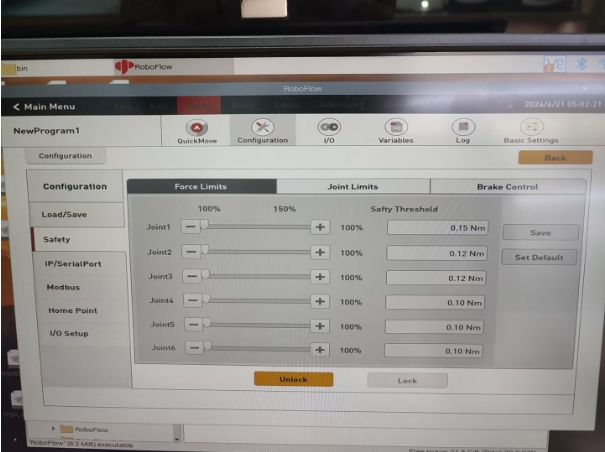
Q:630是否带碰撞检测功能,如果带,那么碰撞检测阈值是否可以调整?
- A:我们的机器有碰撞检测设计,在收到较大碰撞时机器会自动停止运动,如果你希望可以检测到比较小的力也产生碰撞检测,你可以尝试调整下面的碰撞检测参数,建议单次调整幅度为0.01
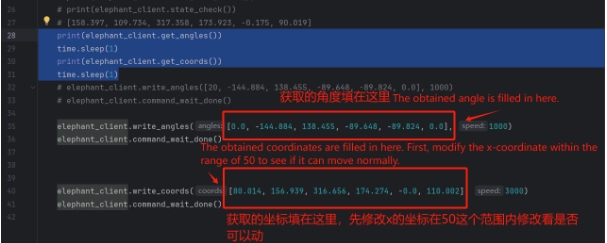
Q:630&600的坐标控制无法使用如何解决wait_command_done:-1?
检查机械臂是否姿态为下图这种

然后使用get_angles和get_coords这两个api获取坐标和角度

在获取坐标和角度后修改write_angles和write_coords的角度和坐标
from pymycobot import ElephantRobot
import time
# 这个代码没上电,你要确保你已经上电。
if __name__=='__main__':
# "将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.1.153", 5001,debug=True)
elephant_client.start_client()
print(elephant_client.get_angles())
time.sleep(1)
print(elephant_client.get_coords())
time.sleep(1)
elephant_client.write_angles([0.0, -144.884, 138.455, -89.648, -89.824, 0.0], 1000)
elephant_client.command_wait_done()
elephant_client.write_coords([80.014, 156.939, 316.656, 174.274, -0.0, 110.002], 3000)
elephant_client.command_wait_done()
Q:什么的是正向运动学和逆向运动学?
- A:正向运动学(Forward Kinematics)是指已知机器人各个关节的角度(或位移),求解机器人末端执行器(如机械臂的手爪)在笛卡尔空间中的位置和姿态。get_coords()的API中实现了,但是具体的算法不公开。 逆运动学(Inverse Kinematics)与正向运动学相反,它是指已知机器人末端执行器在笛卡尔空间中的位置和姿态,求解机器人各个关节的角度(或位移)write_coords()、send_coords()