API接口说明
1 概述
大象机器人允许用户使用Socket远程控制机器人。 我们使用TCP协议在客户端和机器人之间进行通信,用户可以通过TCP发送格式化字符串来获取或设置机器人的某些属性/状态,每个API的格式介绍如下。
2 Socket字符串格式规范
2.1 获取机器人当前角度
Socket字符串格式:get_angles()
- 功能: 获取所有关节角度
- 返回值:
list一个浮点值的列表,代表所有关节的角度 - 示例: 调用成功,将收到 get_angles:[0.174058, 0.520382, -0.07874, 0.092855, 0.0, 0.030356],如果发生错误,将返回InvalidAngles()函数(格式为[-1.0, -2.0, -3.0, -4.0, -1.0, -1.0])
2.2 设置机器人的角度
Socket字符串格式:set_angles(joint1_angle, joint2_angle, joint3_angle, joint4_angle, joint5_angle, joint6_angle,speed)
- 功能: 发送所有角度给机械臂所有关节
- 参数说明:
joint1_angle:关节1角度,范围-180.00 ~ 180.00joint2_angle:关节2角度,范围-270.00 ~ 90.00joint3_angle:关节3角度,范围-150.00 ~ 150.00joint4_angle:关节4角度,范围-260.00 ~ 80.00joint5_angle:关节5角度,范围-168.00 ~ 168.00joint6_angle:关节6角度,范围-174.00 ~ 174.00speed: 表示机械臂运动的速度,取值范围是0 ~ 2000
- 示例: set_angles(10.0,11.0,12.2,12.3,11.1,16.0,500) ,如果成功调用,将会收到:set_angles:[ok] ,如果发送数据错误,将会收到:set_angles:error_message
2.3 设置一个关节的角度
Socket字符串格式:set_angle(joint,angle, speed)
- 功能: 发送指定的单个关节运动至指定的角度
- 参数说明:
joint: J1 / J2 / J3 / J4 / J5 / J6angle: 具体每个关节角度范围请参考set_angles()函数的参数说明speed: 表示机械臂运动的速度,取值范围是0 ~ 2000
- 示例: set_angle(J1,50.5,500),如果成功调用,将会收到:set_angle:[ok],如果发生错误,将会收到:set_angle:error_message
2.4 获取机器人的当前坐标
Socket字符串格式:get_coords()
- 功能: 获取当前坐标和姿态
- 返回值:
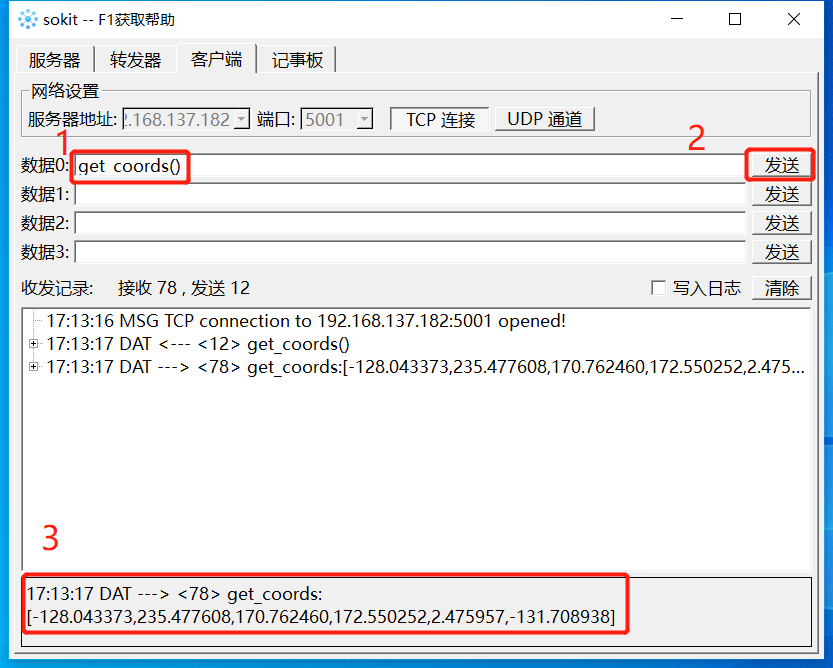
list包含坐标和姿态的列表,长度为 6,依次为[x, y, z, rx, ry, rz] - 示例: 如果成功调用,将会收到:get_coords :[0.174058, 0.520382, -0.07874, 0.092855, 0.0, 0.030356],如果发生错误,将返回InvalidCoords()函数(格式为[-1.0, -2.0, -3.0, -4.0, -1.0, -1.0])
2.5 设置机器人的坐标
Socket字符串格式:set_coords(axis_x_coord, axis_y_coord, axis_z_coord, axis_rx_coord, axis_ry_coord, axis_rz_coord,speed)
- 功能: 发送整体坐标和姿态,让机械臂头部从原来点移动到指定点
参数说明:
axis_x_coord: x坐标axis_y_coord: y坐标axis_z_coord: z坐标axis_rx_coord: rx坐标axis_ry_coord: ry坐标axis_rz_coord: rz坐标speed: 表示机械臂运动的速度,范围是0 ~ 2000
示例: set_coords(10.0,11.0,12.2,12.3,11.1,16.0,500),如果成功调用,将会收到:set_coords:[ok],如果发生错误,将会收到:set_coords:error_message
2.6 设置一个轴的坐标
Socket字符串格式:set_coord(axis,coordinate ,speed)
- 功能: 发送单个坐标值给机械臂进行移动
- 参数说明:
axis: x / y / z / rx / ry / rzcoordinate: 输入您想要到达的坐标值speed: 表示机械臂运动的速度,范围是0-2000
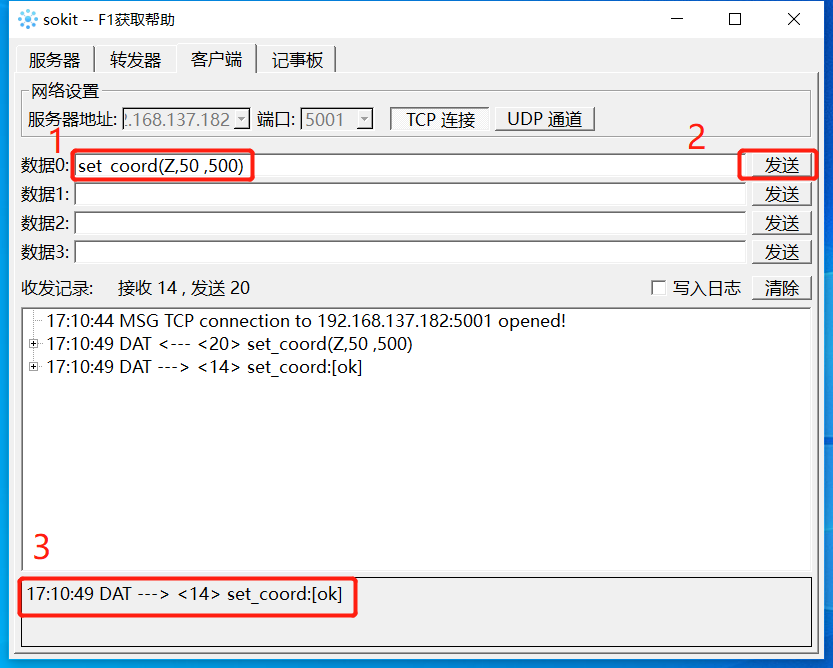
- 示例: set_coord(x,50.5,500) ,如果成功调用,将会收到:set_coords:[ok]。如果发生错误,将会收到:set_coords:error_message
2.7 获取数字输出引脚的信号
Socket字符串格式:get_digital_out(pin_number)
- 功能: 获取输出引脚信号
- 参数说明:
pin_number: 0 ~ 5 对应底座电气接口 OUT 1 ~ 6 ; 16 ~ 17 对应机械臂末端电气接口 OUT 1 ~ 2 (可查阅Pro600使用手册对照确认)
- 示例: get_digital_out(1) ,如果成功调用,将会收到:get_digital_out:0 或 get_digital_out:1 ,如果发生错误,将会收到:get_digital_out:error_message
2.8 设置数字输出引脚的信号
Socket字符串格式:set_digital_out(pin_number,signal)
- 功能: 设置输出引脚信号
- 参数说明:
pin_number: 0 ~ 5 对应底座电气接口 OUT 1 ~ 6 ; 16 ~ 17 对应机械臂末端电气接口 OUT 1 ~ 2 (可查阅Pro600使用手册对照确认)signal: 1 - 高电平,0 - 低电平
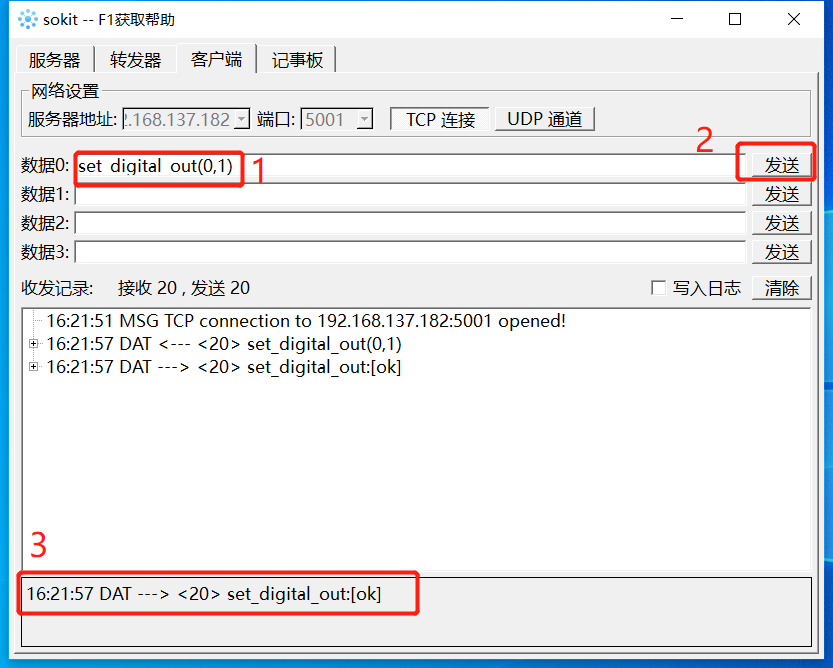
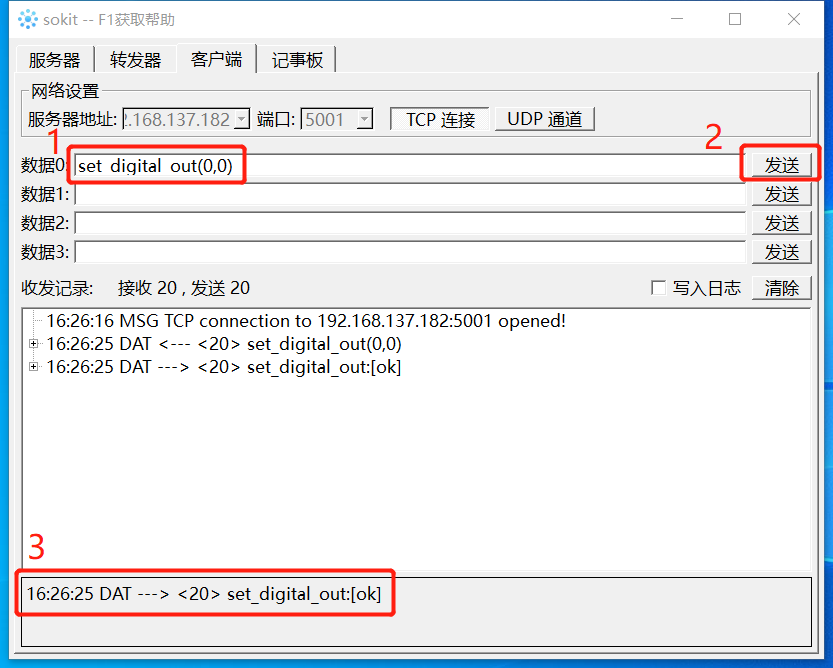
- 示例: set_digital_out(1,1) 如果成功调用,将会收到:set_digital_out:[ok],如果发生错误,将会收到:set_digital_out:error_message
2.9 获取引脚中的数字信号
Socket字符串格式:get_digital_in(pin_number)
- 功能: 获取输入引脚信号
- 参数说明:
pin_number: 0 ~ 5 对应底座电气接口 IN 1 ~ 6 ; 16 对应机械臂末端电气接口 IN 1 (可查阅Pro600使用手册对照确认)
- 示例: get_digital_in(1) , 如果成功调用,将会收到:get_digital_in:0 或 get_digital_in:1 ,如果发生错误,将会收到:get_digital_in:error_message
2.10 向一个方向连续改变一个轴的坐标
Socket字符串格式:jog_coord(axis,direction,speed)
- 功能: 控制机器人按照指定的坐标轴方向持续移动
- 参数说明:
axis: 代表不同的方向,可用参数有 x / y / z / rx / ry / rzdirection: 主要控制机器臂移动的方向, -1 - 负方向 ,0 - 停止,1 - 正方向speed: 速度 0 ~ 2000
- 示例: jog_coord(x,1, 500) ,如果成功调用,将会收到:jog_coord:[ok],如果发生错误,将会收到:jog_coord:error_message
2.11 向一个方向连续改变一个关节的角度
Socket字符串格式:jog_angle(joint,direction,speed)
- 功能: 控制机器人按照指定的角度持续移动
- 参数说明:
joint: 代表机械臂的关节,可用参数有 J1 / J2 / J3 / J4 / J5 / J6direction: 主要控制机器臂移动的方向,-1 - 负方向 ,0 - 停止,1 - 正方向speed: 速度 0 ~ 2000
- 示例: jog_angle(J1, 1, 500) ,如果成功调用,将会收到:jog_angle:[ok], 如果发生错误,将会收到:jog_angle:error_message
2.12 启动系统
提示:用此命令前,需先使用power_on(),使机械臂上电,否则无法启动系统
Socket字符串格式:state_on()
- 功能: 启动系统
- 示例: state_on(),如果成功调用,将会收到:state_on:[ok] ,如果发生错误,将会收到:state_on:error_message
2.13 关闭系统
Socket字符串格式:state_off()
- 功能: 关闭系统,但是机械臂仍然处于上电状态
- 示例: state_off(),如果成功调用,将会收到:state_off:[ok],如果发生错误,将会收到:state_off:error_message
2.14 停止任务
Socket字符串格式:task_stop()
- 功能: 停止运行程序
- 示例: task_stop() ,如果成功调用,将会收到:task_stop:[ok],如果发生错误,将会收到:task_stop:error_message
2.15 设置进给速率
Socket字符串格式:set_feed_rate(speed)
- 功能: 设置速度
- 参数说明:
speed: 速度 0 ~ 100
- 示例: set_feed_rate(50.0),如果成功调用,将会收到:set_feed_rate: 0,返回其他值则为调用失败。
2.16 让机器人短暂休眠
Socket字符串格式:wait(seconds)
- 功能: 设置系统等待时间
- 参数说明:
seconds: 等待时长
- 示例: wait(10.5) ,如果成功调用,将会收到:wait:[ok],如果发生错误,将会收到:wait:error_message。这个功能将使机器人在给定的几秒钟内“休眠”,不执行任何收到的指令。
2.17 翻转Z轴的值
Socket字符串格式:set_upside_down(up_dn)
- 功能: 翻转Z轴的值
- 参数说明:
up_dn: 1 - 翻转,0 - 不翻转
- 示例: set_upside_down(1),如果成功调用,将会收到:set_upside_down:[ok],如果发生错误,将会收到:set_upside_down:error_message
2.18 机器人上电
Socket字符串格式:power_on()
- 功能: 机器人上电
- 示例: power_on(),如果成功调用,将会收到:power_on:[ok],如果发生错误,将会收到:power_on:error_message
2.19 机器人断电
Socket字符串格式:power_off()
- 功能: 机器人断电
- 示例: power_off(),如果成功调用,将会收到:power_off:[ok],如果发生错误,将会收到:power_off:error_message
2.21 获取机器人运行速度
Socket字符串格式:get_speed()
- 功能: 获取运行速度,速度参数单位是mm/s
- 示例: get_speed() ,如果成功调用,将会收到:get_speed: speed,如果发生错误,将会收到:get_speed:error_message
2.22 检查机器人状态
Socket字符串格式:state_check()
- 功能: 获取机器人状态
- 示例: state_check() ,如果机器人处于正常状态,将会收到state_check:1,如果机器人处于非正常状态,将会收到state_check:0,如果发生错误,将会收到:state_check:error_message
2.23 检查机器人是否在运行
Socket字符串格式:check_running()
- 功能: 检查机器人是否在运行
- 示例: check_running(),如果机器人正在运行,将会收到check_running:1,如果机器人未运行,将会收到check_running:0,如果发生错误,将会收到:check_running:error_message
2.24 设置机器人的扭矩限制
Socket字符串格式:set_torque_limit(axis,torque)
- 功能: 设置机器人的扭矩限制
- 参数说明:
axis: x / y / z / rx / ry / rztorque: 范围为0 ~ 2 ,扭矩单位为N
- 示例: set_torque_limit(x,10.0) ,如果成功调用,将会收到:set_torque_limit:[ok],如果发生错误,将会收到:set_torque_limit:error_message
2.25 打开一个g_code格式的文件
Socket字符串格式:program_open(file_path_name)
- 功能: 打开一个g_code格式的文件
- 参数说明:
file_path_name: 要打开文件的绝对路径
- 示例: program_open(/usr/a.txt) ,如果成功调用,将会收到:program_open:0,如果发生错误,将会收到:program_open:error_message
2.26 从给定的g_code格式文件行中运行指定行
Socket字符串格式:program_run(line_number)
- 功能: 从给定的g_code格式文件行中运行指定行
- 参数说明:
line_number: 要运行的代码的行数
- 示例: program_run(0),如果成功调用,将会收到:program_run:0,如果发生错误,将会收到:program_run:error_message
2.27 获取机器人错误信息
Socket字符串格式:read_next_error()
- 功能: 机器人错误检测
- 示例: read_next_error(),如果成功调用,将会收到:read_next_error:error_message
2.28 设置机器人的有效载荷
Socket字符串格式:set_payload(payload)
- 功能: 设置机器人的有效负载
- 参数说明:
payload: 范围 0.0 ~ 2.0,单位为kg
- 示例: set_payload(1.0),如果成功调用,将会收到:set_payload:[ok],如果发生错误,将会收到:set_payload:error_message
2.29 设置机器人的加速度
Socket字符串格式:set_acceleration(acc)
- 功能: 设置机器人的加速度
- 参数说明:
acc: 加速度,必须为整数,单位为mm/s
- 示例: set_acceleration(50),如果成功调用,将会收到:set_acceleration:[ok],如果发生错误,将会收到:set_acceleration:error_message
2.30 获取机器人的加速度
Socket字符串格式:get_acceleration()
- 功能: 获取机器人的加速度
- 示例: get_acceleration(),如果成功调用,将会收到:get_acceleration: acc(实际加速度)
2.31 等待命令完成
Socket字符串格式:wait_command_done()
- 功能: 等待到上一个命令完成为止
- 示例: wait_command_done(),如果成功调用,将会收到:set_payload:0,如果发生错误,将会收到:set_payload:error_message
2.32 暂停程序
Socket字符串格式:pause_program()
- 功能: 暂停正在运行的程序
- 示例: pause_program() ,如果成功调用,将会收到:pause_program:[ok],如果发生错误,将会收到:pause_program:error_message
2.33 恢复程序
Socket字符串格式:resume_program()
- 功能: 恢复被 暂停的程序
- 示例: resume_program(),如果成功调用,将会收到:resume_program:[ok],如果发生错误,将会收到:resume_program:error_message
2.34 变量赋值
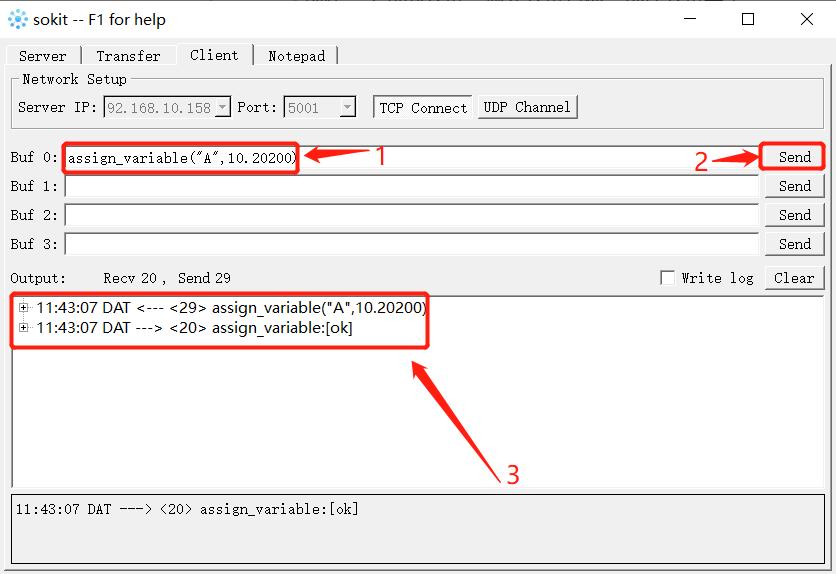
Socket字符串格式:assign_variable("variable_name",value)
- 功能: 给定义好的变量赋值
- 示例: assign_variable("A",10) ,assign_variable("A",10.20202) 或assign_variable("B",”ABC”) 或 assign_variable("C",True),assign_variable("C",False)
变量名需要使用双引号("")进行引用;值是字符串,使用双引号(“”)引用,值是整数型或者浮点型时,不需要用序号,直接写数职即可,值为布尔型时,用True/False,直接写0/1,变量会被改为整数型
返回字符串被格式化为键值对,键是函数名,值是接收自机器人的值,如果成功调用,将会收到:assign_variable:[ok]。如果发生错误,将会收到:assign_variable:[wrong request format]。
以下为使用 assign_variable("variable_name",value) 的完整实例:
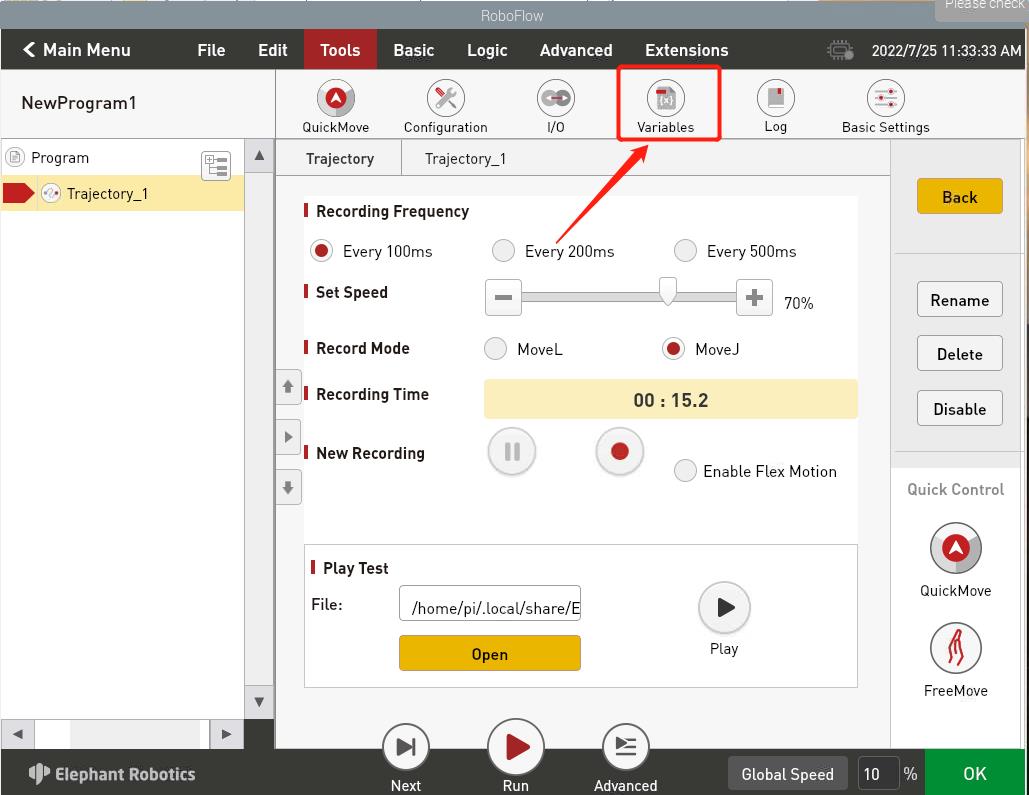
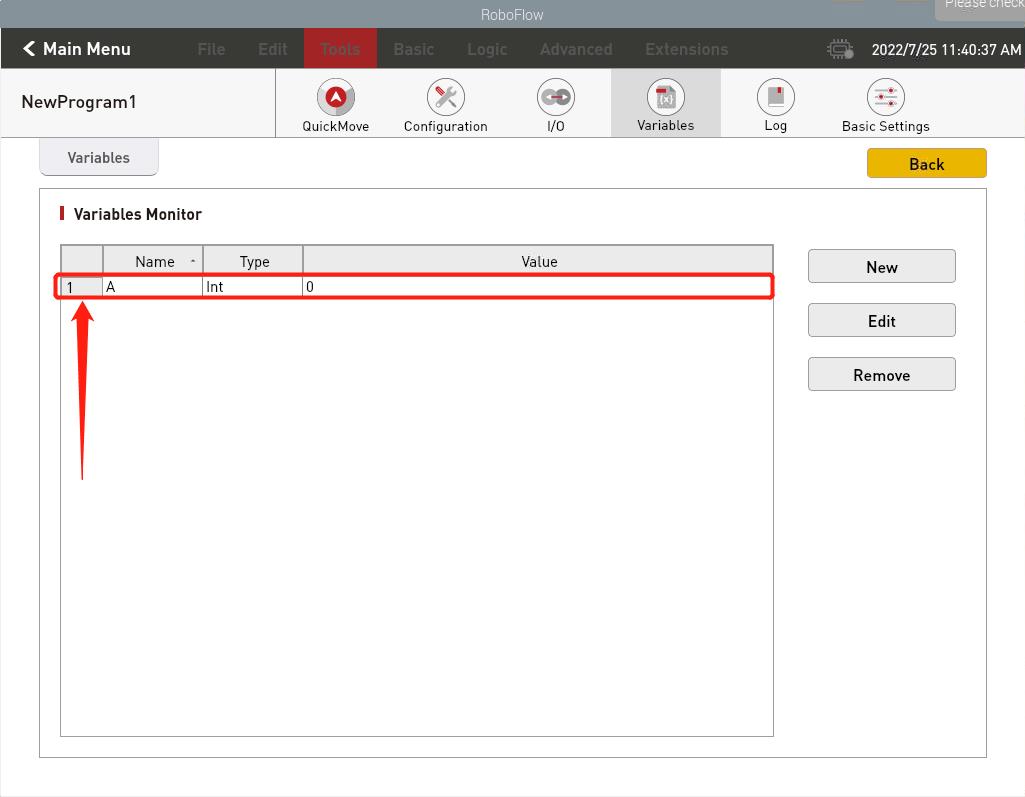
- 首先,需要在Roboflow中设置变量,点击 Tools -> Variables
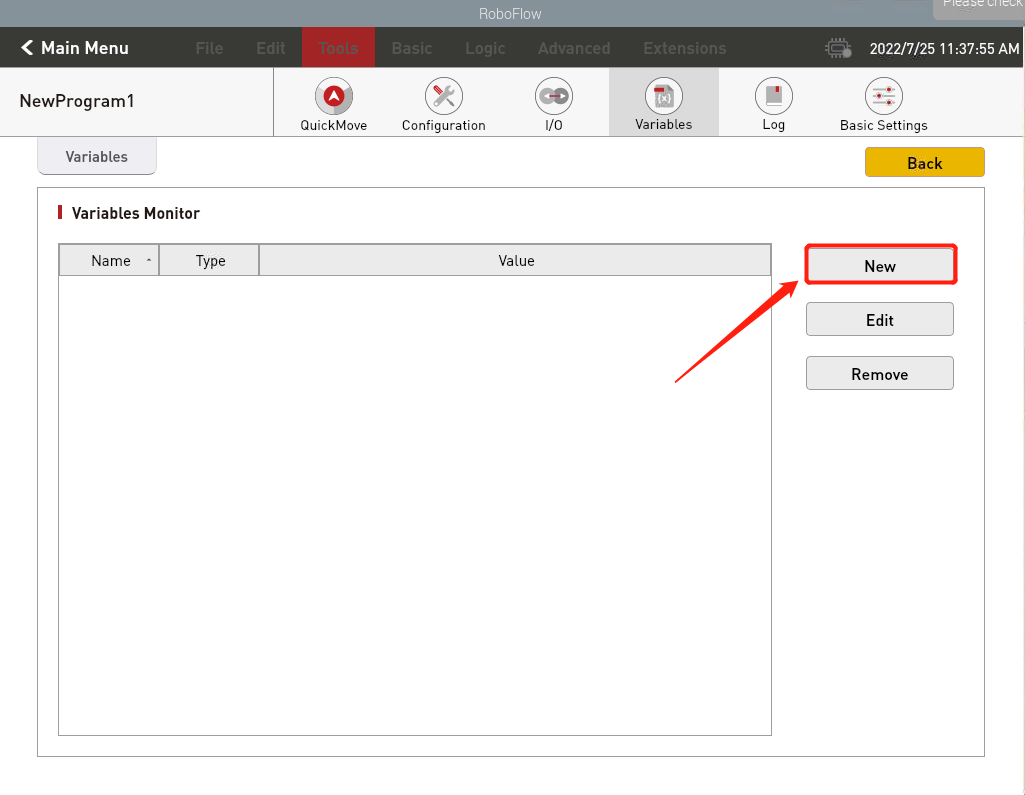
- 创建一个新的变量,输入变量名称,选择变量类型
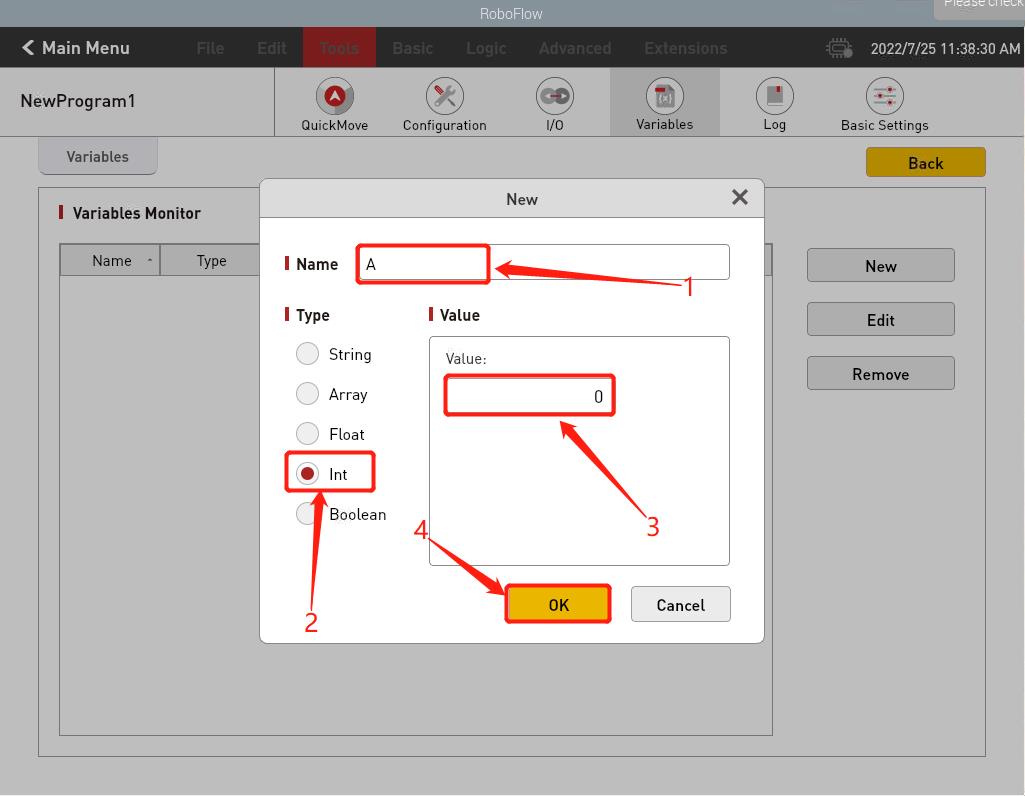
- 创建成功,如图所示
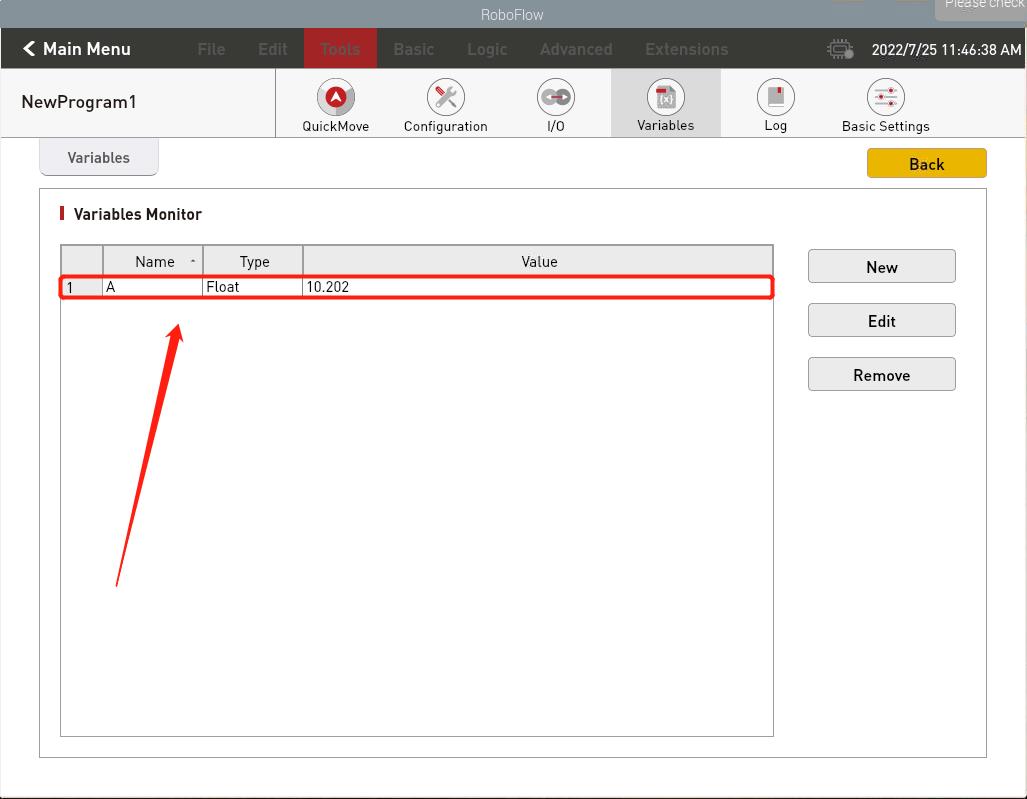
- 变量创建成功后,就可以通过Socket API远程设置变量数值了(PS:value可以直接输入需要使用到的数据类型,无需在Roboflow中修改变量类型,Roboflow会自动根据收到的数据变更变量数据类型)
- 如图所示,变量类型和数据均成功改变
2.35 获取一个变量的值
Socket字符串格式:get_variable("variable_name")
- 功能: 获取一个变量的值
- 示例: get_variable("variable_name"),如果成功调用,将会收到:get_variable:[ok],如果发生错误,将会收到:get_variable:error_message
3 Socket API使用示例
3.1 创建空白程序
如图5-86所示,给机器人上电后,依次点击“编写程序”、“空白程序”,进入程序创建页面。

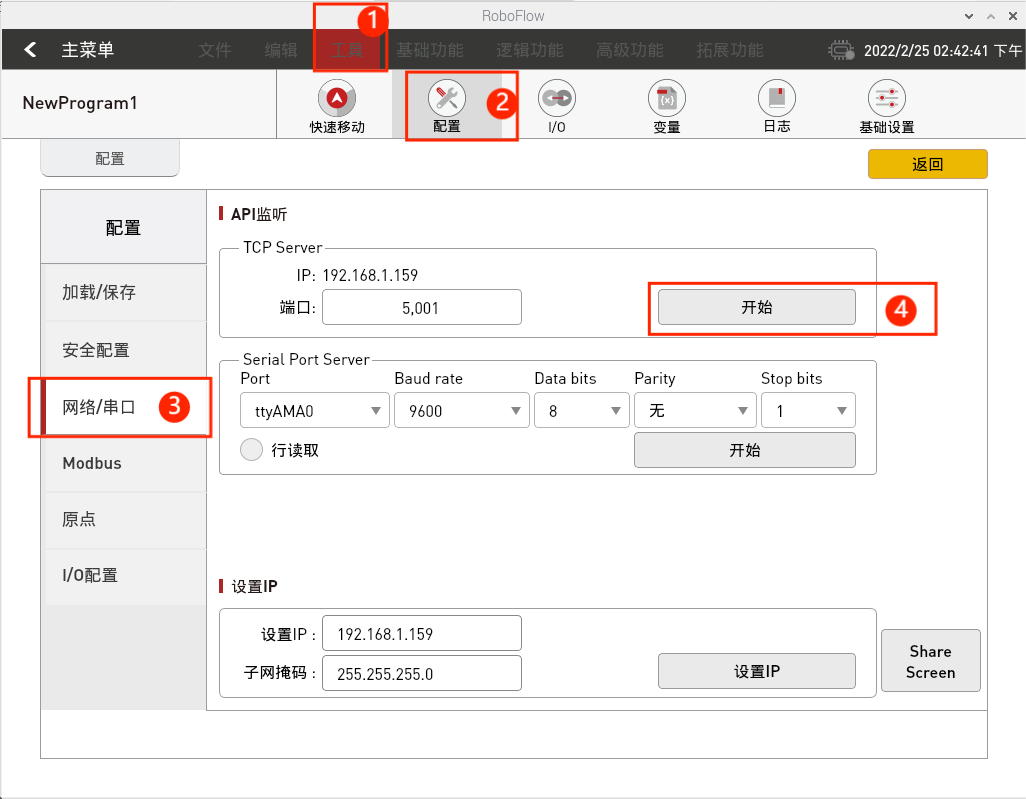
3.2 启动监听
如图5-87所示,依次点击“工具”,“配置”,“网络/串口”进入API监听页面。填写TCP Server的IP地址并设置端口号,IP地址可以在命令行终端通过ifcong命令查看,端口号建议设置区间为1024到49151。
点击“开始”按钮即可开始监听Socket API。
3.3 个人电脑连接机器人
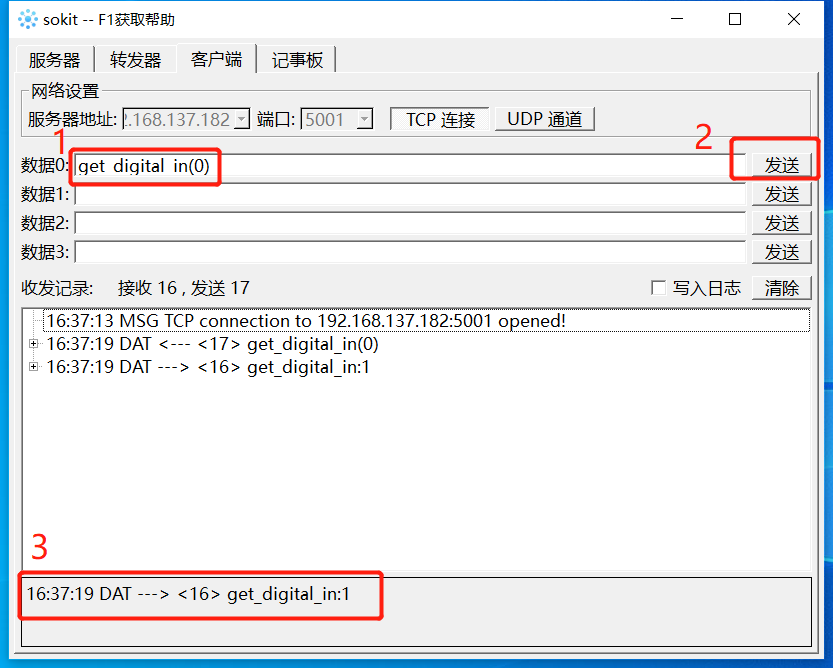
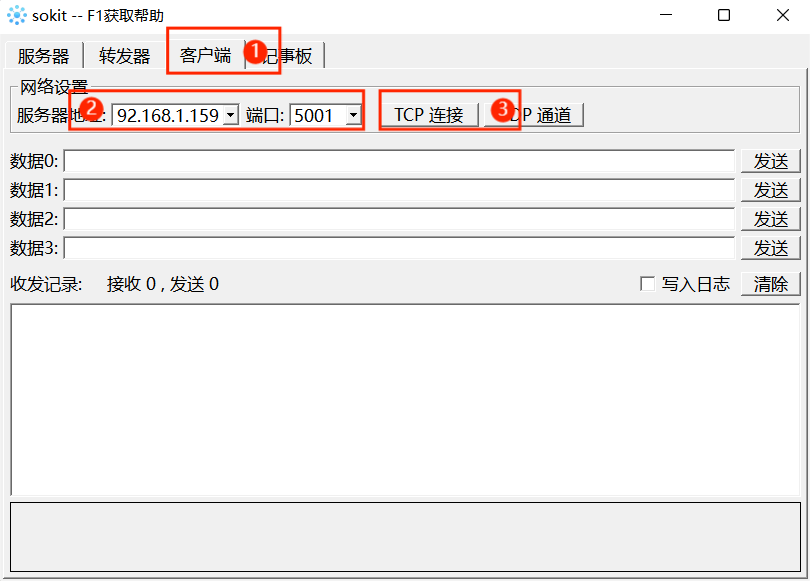
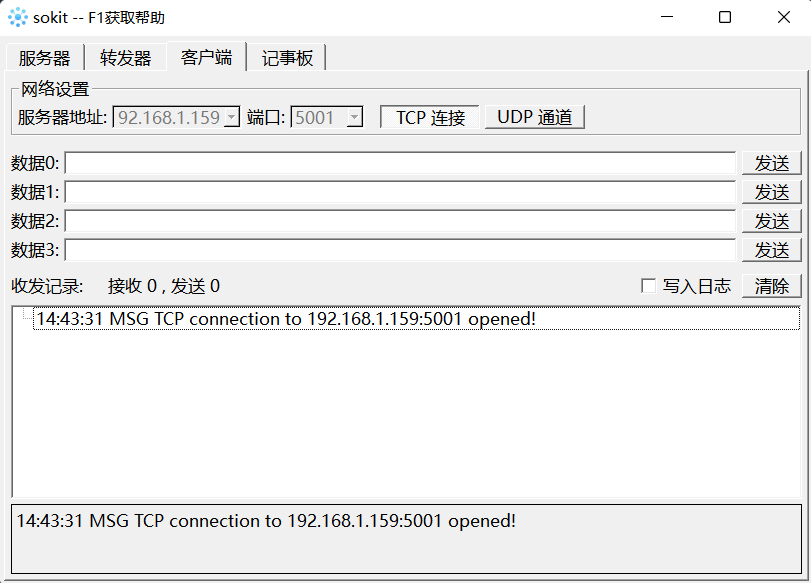
如图5-88所示,在个人电脑端打开软件“sokit”,点击软件上方的“客户端”,进入网络设置页面。服务器地址与端口号填写RoboFlow中设置的值,点击TCP连接即可连接到机器人。若连接成功,则会显示如图5-89所示的信息。
3.4 发送Socket API
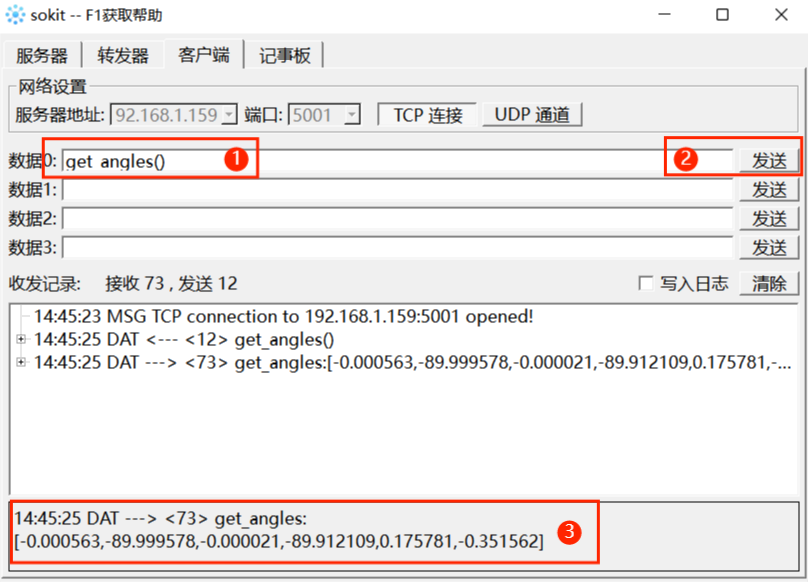
如图5-90所示,在数据窗口中输入想要发送的Socket API,点击发送即可,收到的信息将会在收发记录中显示。
4 Socket API应用场景案列
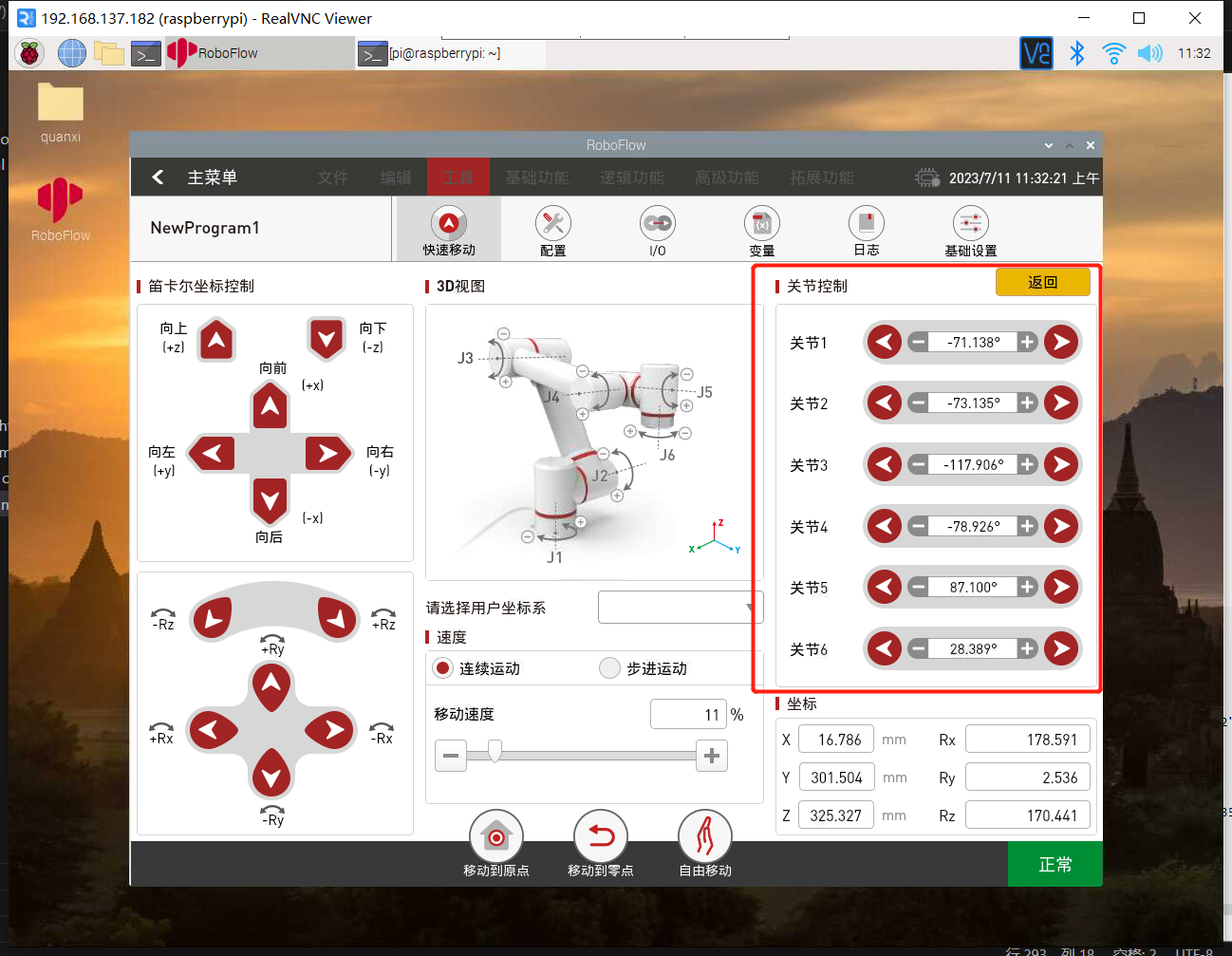
4.1 关节控制
使用VNC Viewer进入RoboFlow系统后,在快速移动界面下,可通过关节控制,控制机器人到达目标位置后,记录操作面板上显示的机器人6个关节的角度
4.1.1多关节控制
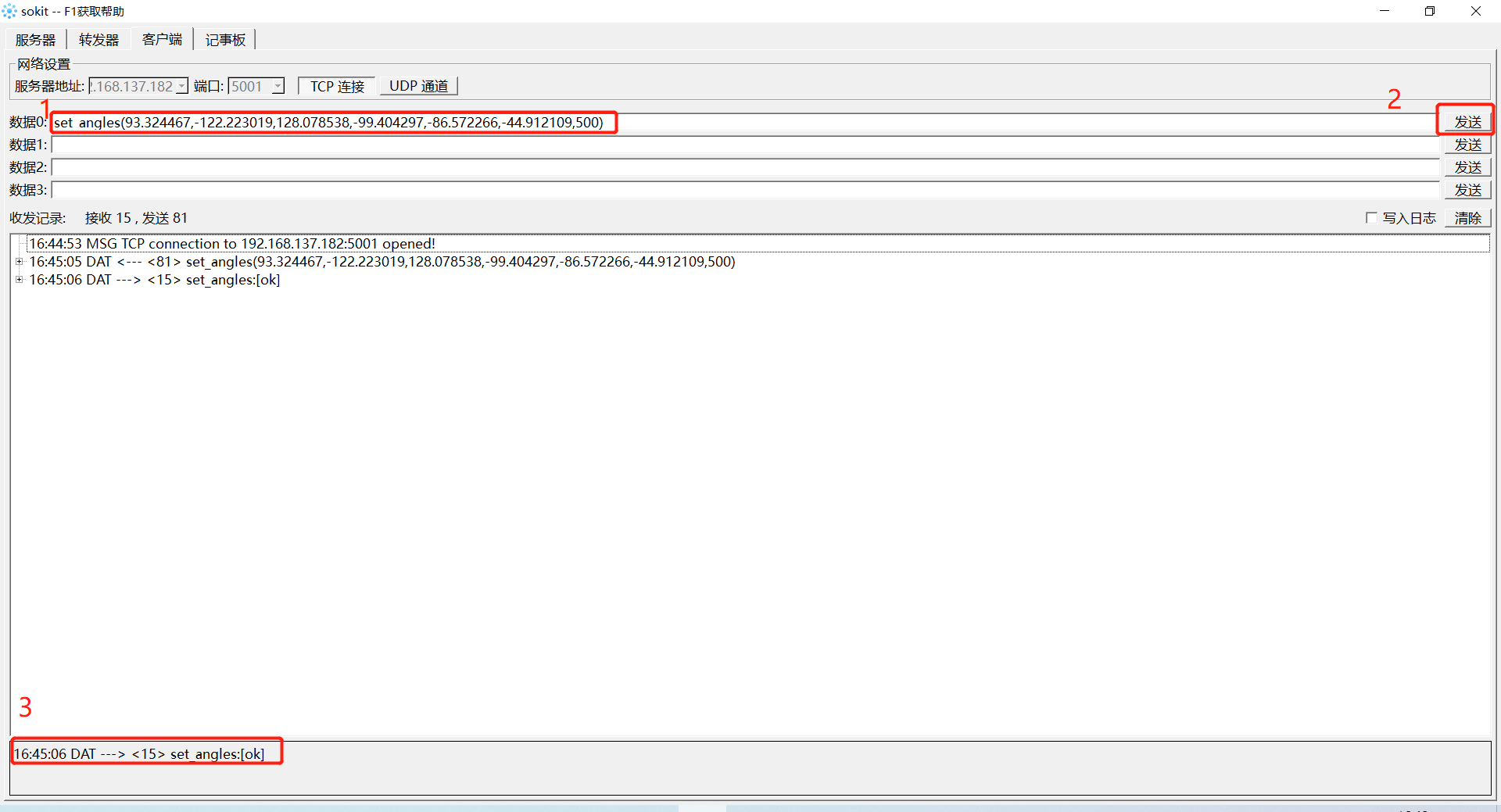
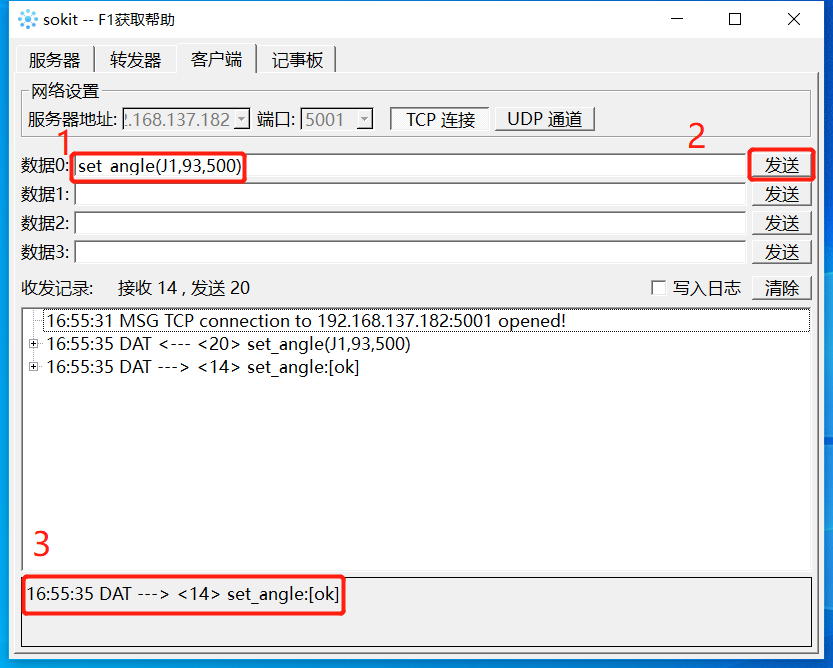
4.1.2单关节控制
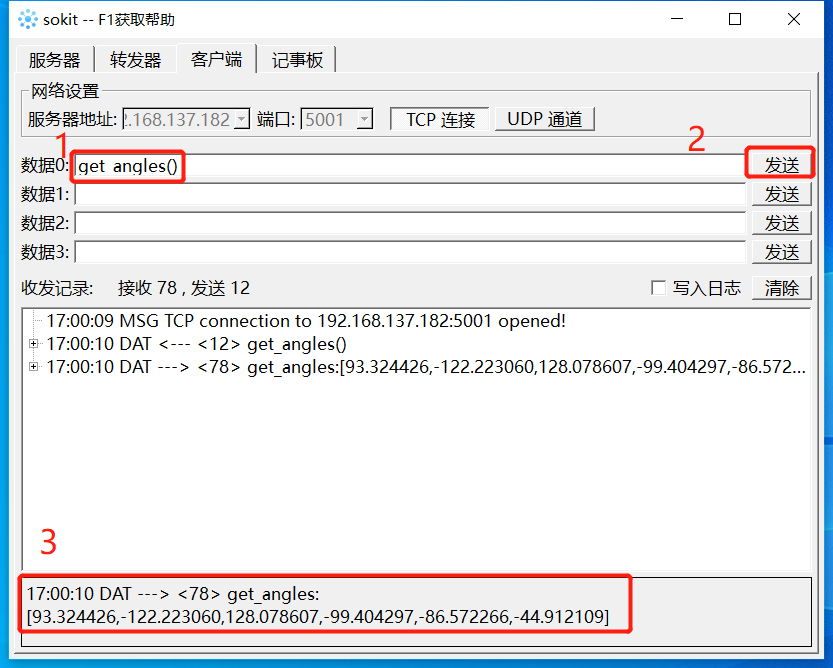
4.1.3六个关节角度获取
4.2 坐标控制
主要用于实现智能规划路线让机械臂从一个位置到另一个指定位置。分为[x,y,z,rx,ry,rz],其中[x,y,z]表示的是机械臂头部在空间中的位置(该坐标系为直角坐标系),[rx,ry,rz]表示的是机械臂头部在该点的姿态(该坐标系为欧拉坐标)。使用VNC Viewer进入RoboFlow系统后,在快速移动界面下,可通过笛卡尔坐标控制,控制机器人到达目标位置后,记录操作面板上显示的机器人6个坐标值

4.2.1多参数坐标控制
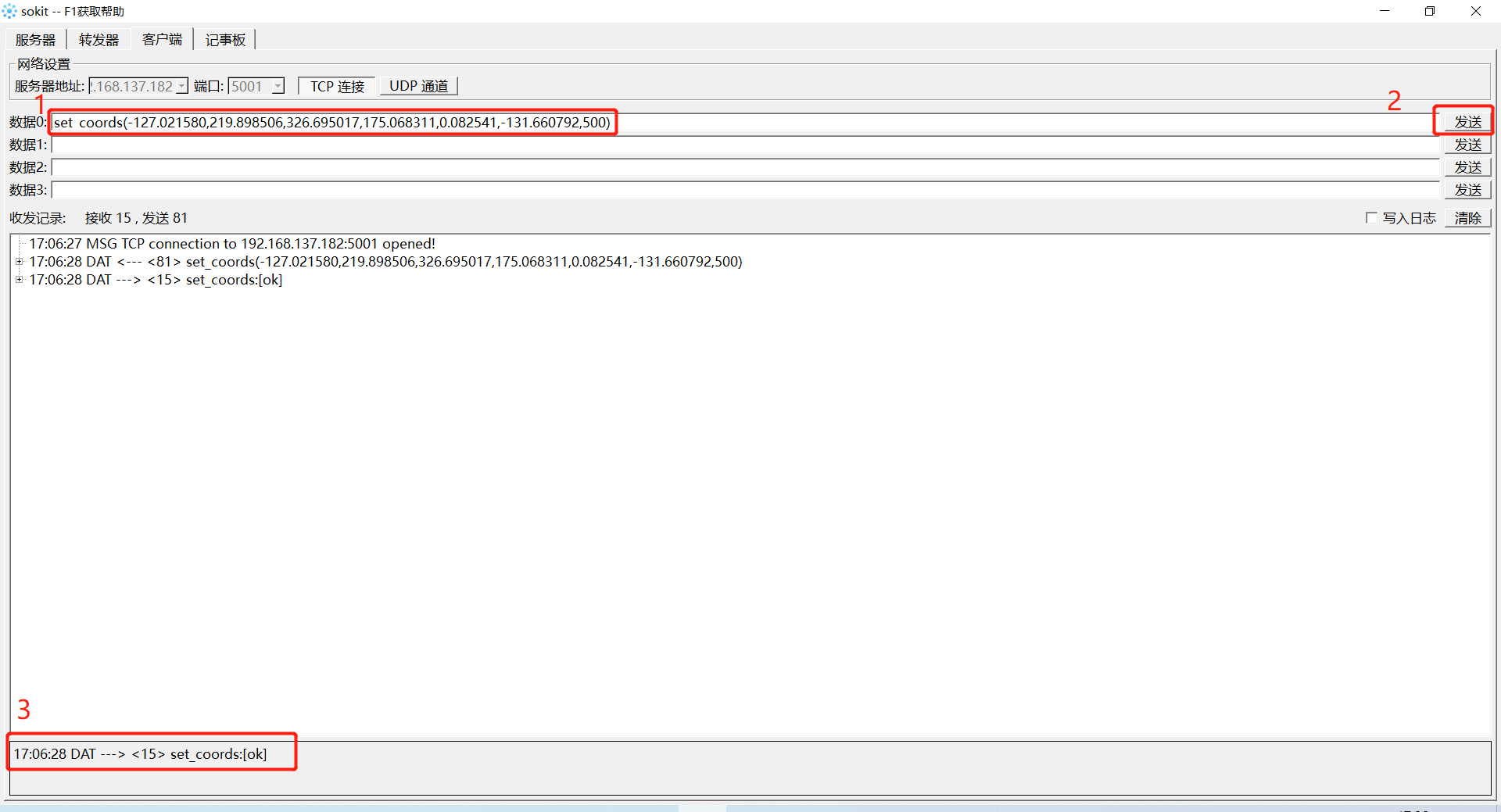
4.2.2单参数坐标控制
4.2.3笛卡尔空间坐标获取
4.3 IO控制
4.3.1控制OUT1引脚输出高电平
4.3.2控制OUT1引脚输出低电平
4.3.3获取OUT1引脚输出状态

4.3.4获取IN1引脚输入状态