Chapter 4 First Installation
1. Product Standard List
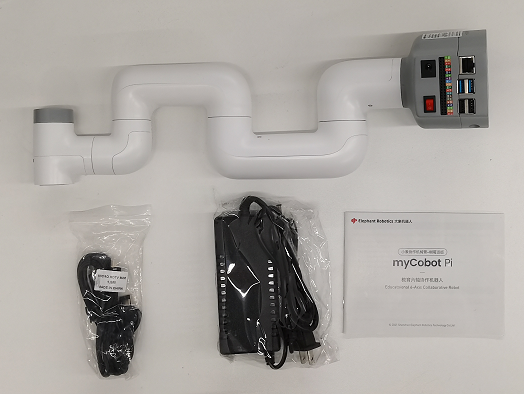
1.1 Product List Image
Thank you for choosing the Elephant Robot myCobot 280 JN robot arm. The content of this chapter is to help you easily get started with the Elephant Robot product and enjoy every wonderful moment brought by the product.
1.2 Product Standard List Comparison Table
| Serial Number | Product |
|---|---|
| 1 | myCobot Robot Arm (Model myCobot-280 JN) |
| 2 | myCobot Robot Arm-Product Brochure |
| 3 | myCobot Robot Arm-Matching Power Cable |
| 4 | USB-Type C |
| 5 | HDMI Cable |
Note: After the packaging box arrives, please confirm that the robot packaging is intact. If there is any damage, please contact the logistics company and the supplier in your area in time. After unpacking, please check the actual items in the box according to the list of items.
2. Product unpacking guide
2.1 Product unpacking graphic guide
Why do you need to disassemble the product according to the steps
In this section, we strongly recommend disassembling the product according to the specified steps. This not only helps to ensure that the product is not damaged during transportation, but also minimizes the risk of unexpected failures. Please read the following graphic guide carefully to ensure the safety of your product during the unpacking process.
1 Check the packaging box for damage. If there is any damage or missing accessories, please contact the logistics company and the supplier in your area in time.
2 Open the box and take out the product brochure, sponge packaging cover, myCobot robot arm, matching power supply, flat base and accessory bag.
3 Make sure each step is completed before proceeding to the next step to prevent unnecessary damage or omissions.
Note: After taking out the product, please carefully check the appearance of each item. Please check the actual items in the box against the list of items.
3. Startup Inspection Guide
3.1 Structural Installation and Fixing
During the movement of the robot arm, if the bottom surface of myCobot is not connected to the desktop or other bottom surface, myCobot will still shake or overturn.
There are three common ways to fix the robot arm:
1) Use Lego keys to fix it on a base with a Lego interface
We sell two types of bases: flat suction cup base and G-type clamp base
 Flat base Applicable model: myCobot 280
Flat base Applicable model: myCobot 280
Install suction cups at the four corners of the base and tighten them.
Use the included Lego technology parts to connect the flat base and the bottom of the robot arm.
Fix the four suction cups on a flat and smooth surface before starting to use.
- Tips: You can add a small amount of non-conductive liquid under the suction cup to fill the gap between the suction cup and the desktop to achieve the best adsorption effect.

G-type base Applicable models: myCobot 280, myPalletizer 260

Use the G-shaped clip to fix the base to the edge of the table
Use the included Lego technology parts to connect the base and the bottom of the robot arm
Make sure it is stable before starting to use

2 myCobot base screw hole connection
The robot needs to be fixed on a solid base before it can be used normally. Base weight requirements: fixed base, or mobile base.
Please make sure that there are corresponding threaded holes on the fixed base before installation.
Before formal installation, please confirm:
The installation environment meets the requirements of the above "Working Environment and Conditions" table.
The installation location is not less than the robot's working range, and there is enough space for installation, use, maintenance, and repair.
Place the base in a suitable position.
The installation-related tools are ready, such as screws, wrenches, etc.
After confirming the above content, please move the robot to the base installation table, adjust the robot position, and align the robot base fixing holes with the holes on the base installation table. After aligning the holes, align the screws with the holes and tighten them.
- Note: When adjusting the robot position on the base installation table, please try to avoid pushing and pulling the robot directly on the base installation table to avoid scratches. When manually moving the robot, please try to avoid applying external force to the fragile parts of the robot body to avoid unnecessary damage to the robot.
4. Power on and preliminary inspection
4.1 Power on the robot
Before operation, please make sure that you have read and followed the contents of Chapter 1 Safety Instructions to ensure safe operation. At the same time, connect the power adapter to the robot arm and fix the base of the robot arm on the table. The connection method is shown in Figure 3-1:
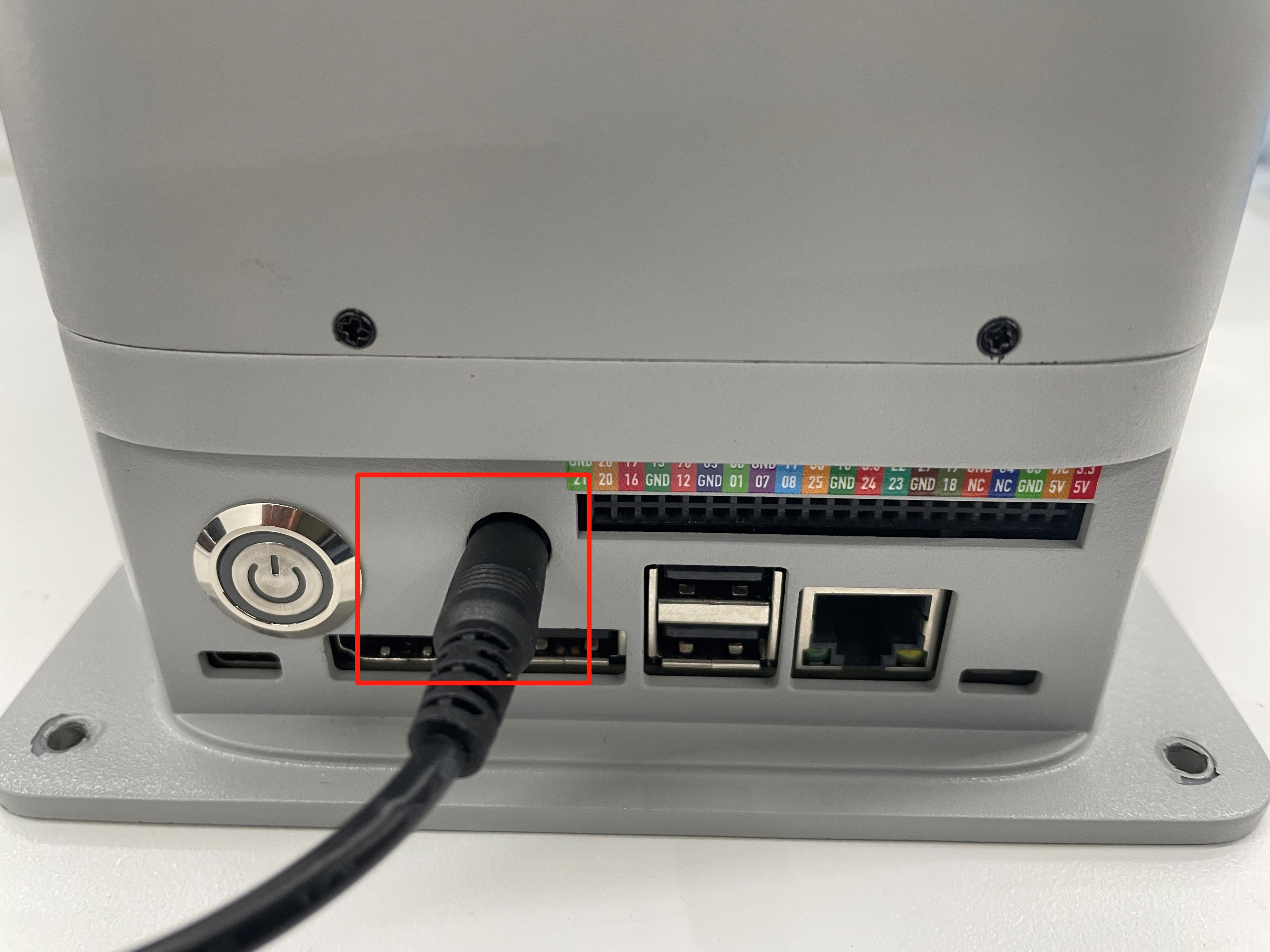
Figure 3-1
myCobot must be powered by an external power supply to provide sufficient power:
- Rated voltage: 12V
- Rated current: 3-5A
- Plug type: DC 5.5mm x 2.1
Note that it cannot be powered by just the TypeC plugged into the M5Stack-basic. Use an officially-adapted power supply to avoid damage to the robot arm.
4.2 Connect external devices
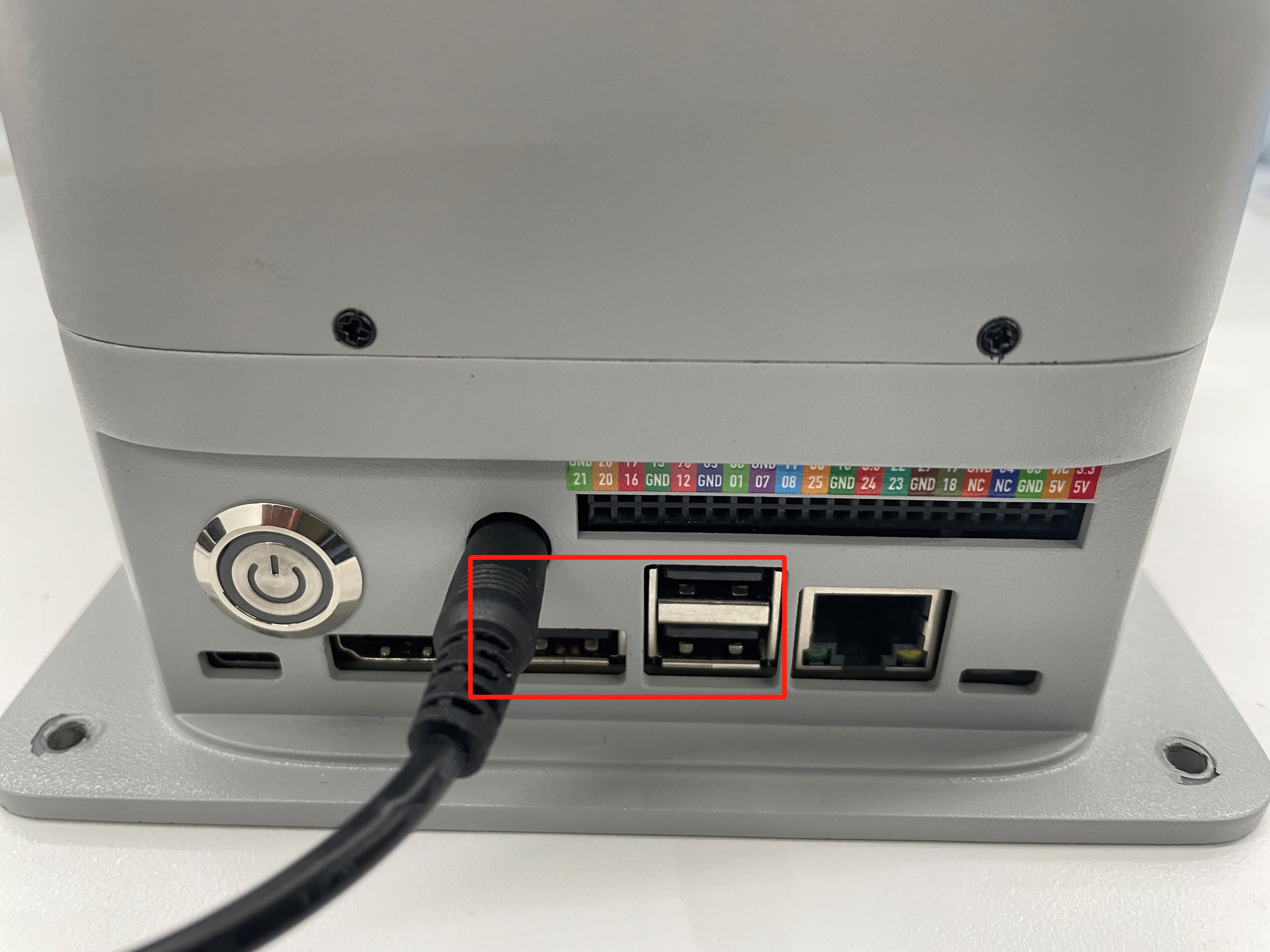
Use the matching HDMI cable to connect the robot arm and the monitor:
- First insert the HDMI cable into the HDMI port of the monitor.
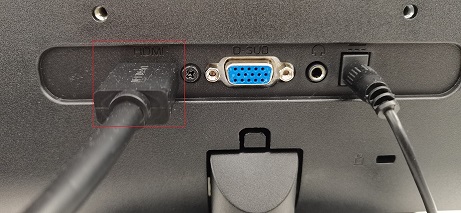
- Then insert the other end into the HDMI port of the robot arm.

- myCobot 280 Jetson Nano has 3 USB ports, which can be directly plugged into a mouse, keyboard and other peripherals for use
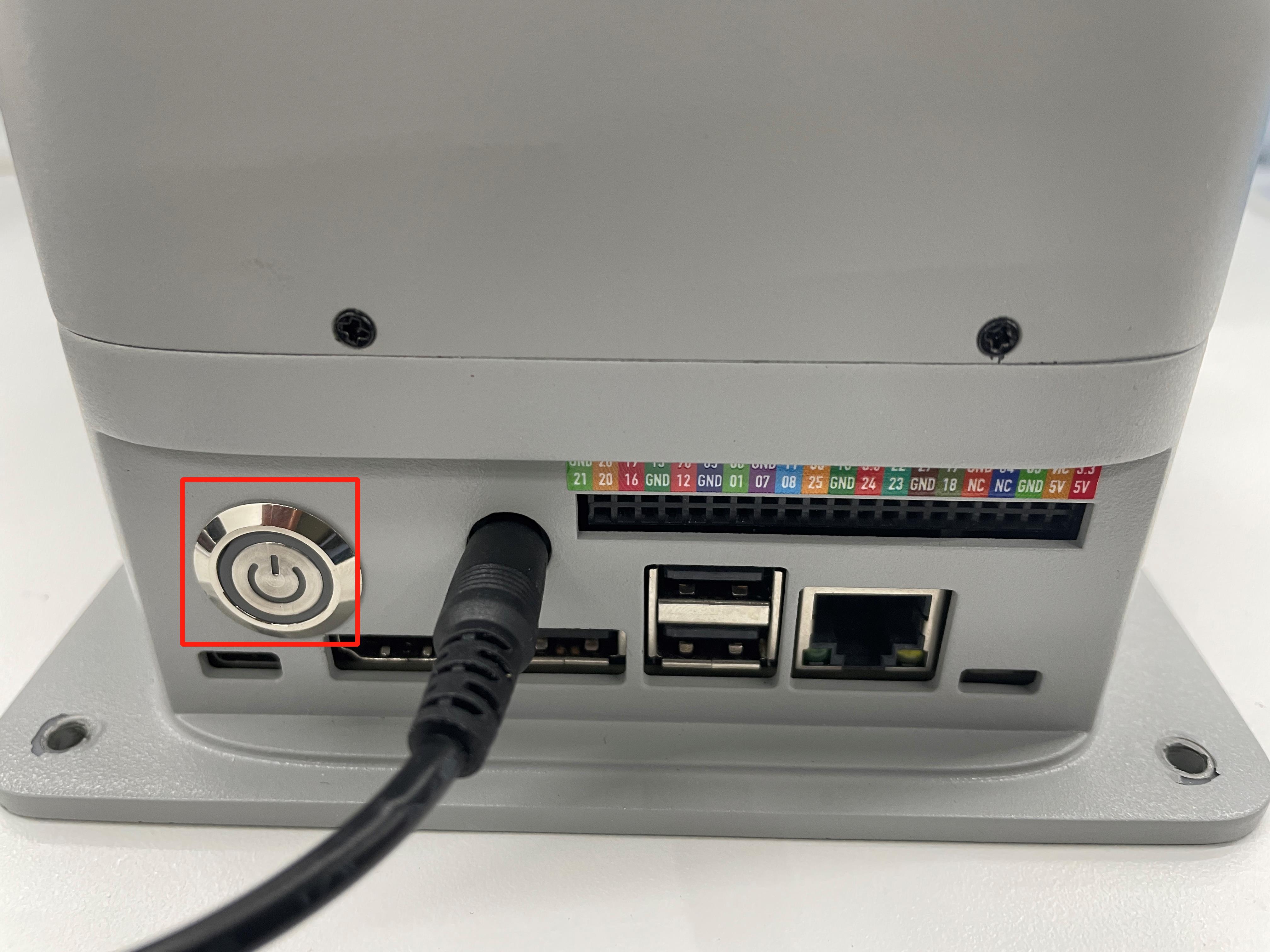
4.3 Power on
After connecting the required external devices, press the button as shown in the circle to start the machine
System card description
The machine comes with a 64G TF card, built-in Ubuntu20.04 system, myStudio firmware burning software, myBlockly graphical programming software installed, and adapted to python and ROS development environment.
Make sure you are using a good quality power supply. We recommend using the official power supply. Before shutting down the robot arm, make sure that the operating system is properly shut down. You can get help on using the robot arm on our gitbook.
5. Unboxing video

6. Common Problem Solving
This section aims to help users solve common problems encountered during use, covering hardware, software, drivers, and how to ask questions in the forum. If you encounter problems while using the robotic arm, please read the contents of this section first to find solutions. If the listed problems cannot help you solve and you have more after-sales questions, please add the after-sales manager WeChat.
How to ask reasonable questions to get solutions
Common driver problems and solutions
Common software problems and solutions
Common hardware problems and solutions
If you have read all the contents of this chapter, please continue to read the next chapter.
← Previous Chapter | Next Chapter →