Use of suction pump
Preparation before starting
M5Stack series: Make sure the robot is connected to the computer (
Other series: Make sure the machine is normal
For the introduction and installation of the suction pump, please refer to Accessories. The robot models that are compatible with the suction pump include myCobot 280, myPalletizer 260 and mechArm 270. Here, the myPalletizer 260 M5Stack robot is used as an example.
Learning content in this chapter
How to use myBlockly to control the suction pump connected to the myPalletizer 260 M5Stack robot
API display
Note: The M5 version and the Raspberry Pi version require different method modules to control the suction pump. The M5 version robot cannot use the Raspberry Pi interface. If the module does not match the model, the program will report an error (as shown below).

- Method module 1 (for M5 version):
Set the bottom pin number status
Applicable scope: myCobot 280 series, myPalletizer 260 series and mechArm 270 series
Parameter introduction:
This module has two parameters that can be adjusted:
- Bottom pin number parameter: the specific pin number at the bottom of the device (only the numeric part is taken)
Running state parameter: 0 means set to running state, 1 means stop state
Purpose: Set the working state of the bottom pin number
Method module 2 (for M5 version):
Get bottom pin number

Applicable scope: myCobot 280 series, myPalletizer 260 series and mechArm 270 series M5 version
Parameter introduction:
Bottom pin number parameter: the specific pin number at the bottom of the device (only the numeric part is taken)
Purpose: Get the working state of the bottom pin number
Method module 3 (for Raspberry Pi version):
Set Mode

- Applicable to: Raspberry Pi versions of myCobot 280 series, myPalletizer 260 series and mechArm 270 series
- Parameter introduction:
- Mode parameter: can enter "BCM" or "BOARD" mode
Purpose: Set the Raspberry Pi GPIO pin mode
Method module 4 (Raspberry Pi version):
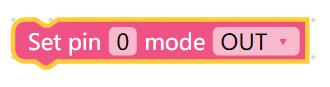
Pin signal setting
Applicable to: Raspberry Pi versions of myCobot 280 series, myPalletizer 260 series and mechArm 270 series
Parameter introduction:
This module has two parameters that can be adjusted:
Pin number: The specific pin number at the bottom of the device (only the digital part is taken)
Level status: IN is set to input signal, OUT is set to output signal
Purpose: Set pin signal
Method module 5 (Raspberry Pi version):
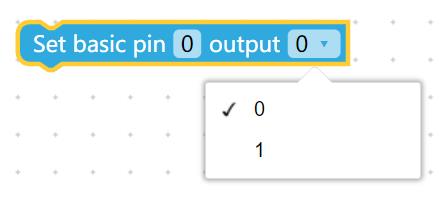
Pin level setting

Applicable scope: Raspberry Pi version of myCobot 280 series, myPalletizer 260 series and mechArm 270 series
Parameter introduction:
This module has two parameters that can be adjusted:
Pin number: the specific pin number at the bottom of the device (only the digital part is taken)
Level state: 0 is set to low level, 1 is set to high level (low level of suction pump starts working, high level stops working)
Purpose: Set the pin to high or low level
Simple demonstration
Vertical suction pump V1.0
- The graphic code is as follows: (for M5 version)
Graphic code is as follows: (for Raspberry Pi version)

Implementation content: The suction pump vibrates and starts working. The suction pump sucks up the object, puts it down after two seconds, and repeats the previous action after another two seconds until the program runs to the end.
Vertical Suction Pump V2.0
- Graphic code is as follows: (for M5 version)
Pin 5/2 controls the solenoid valve and the air release valve respectively
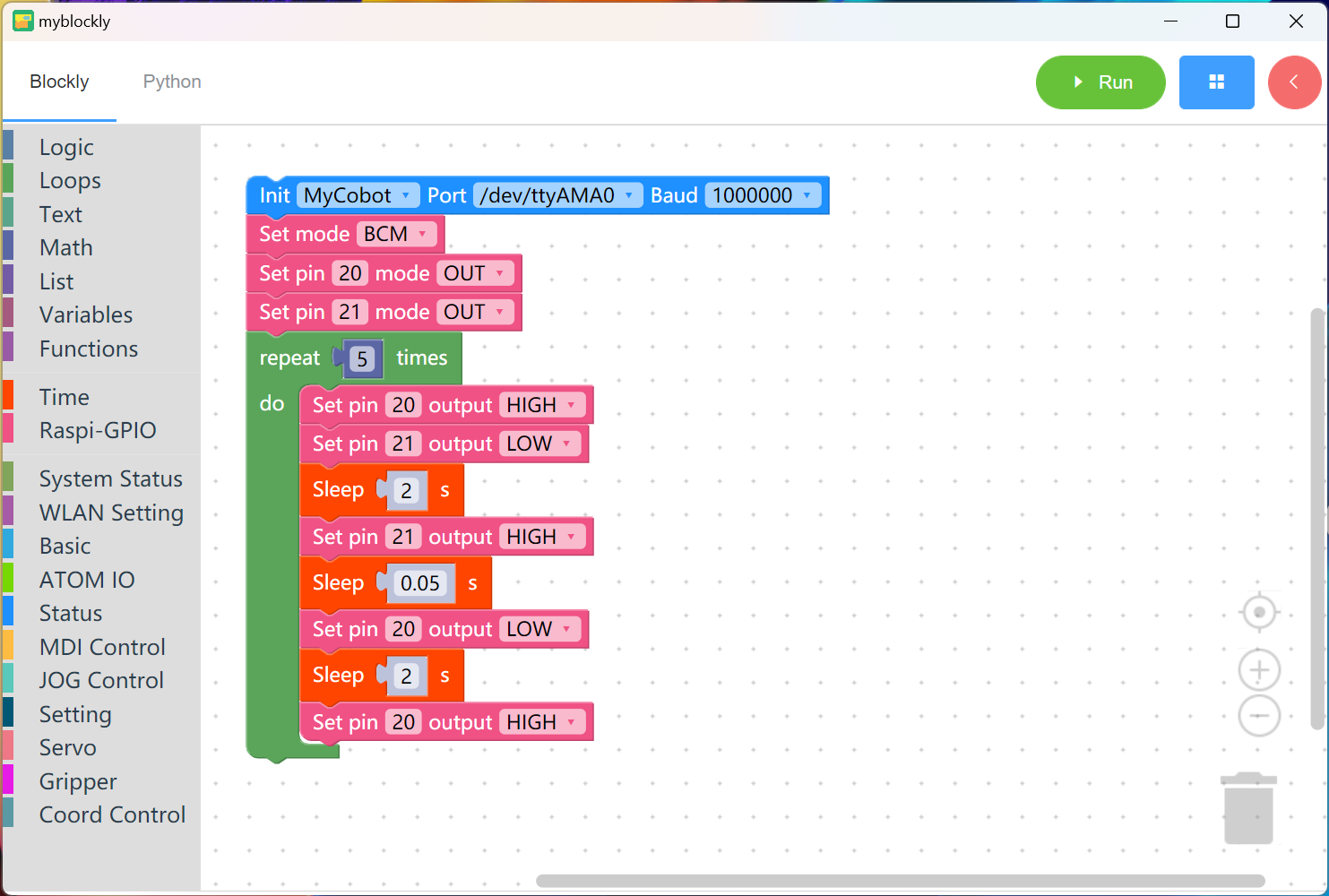
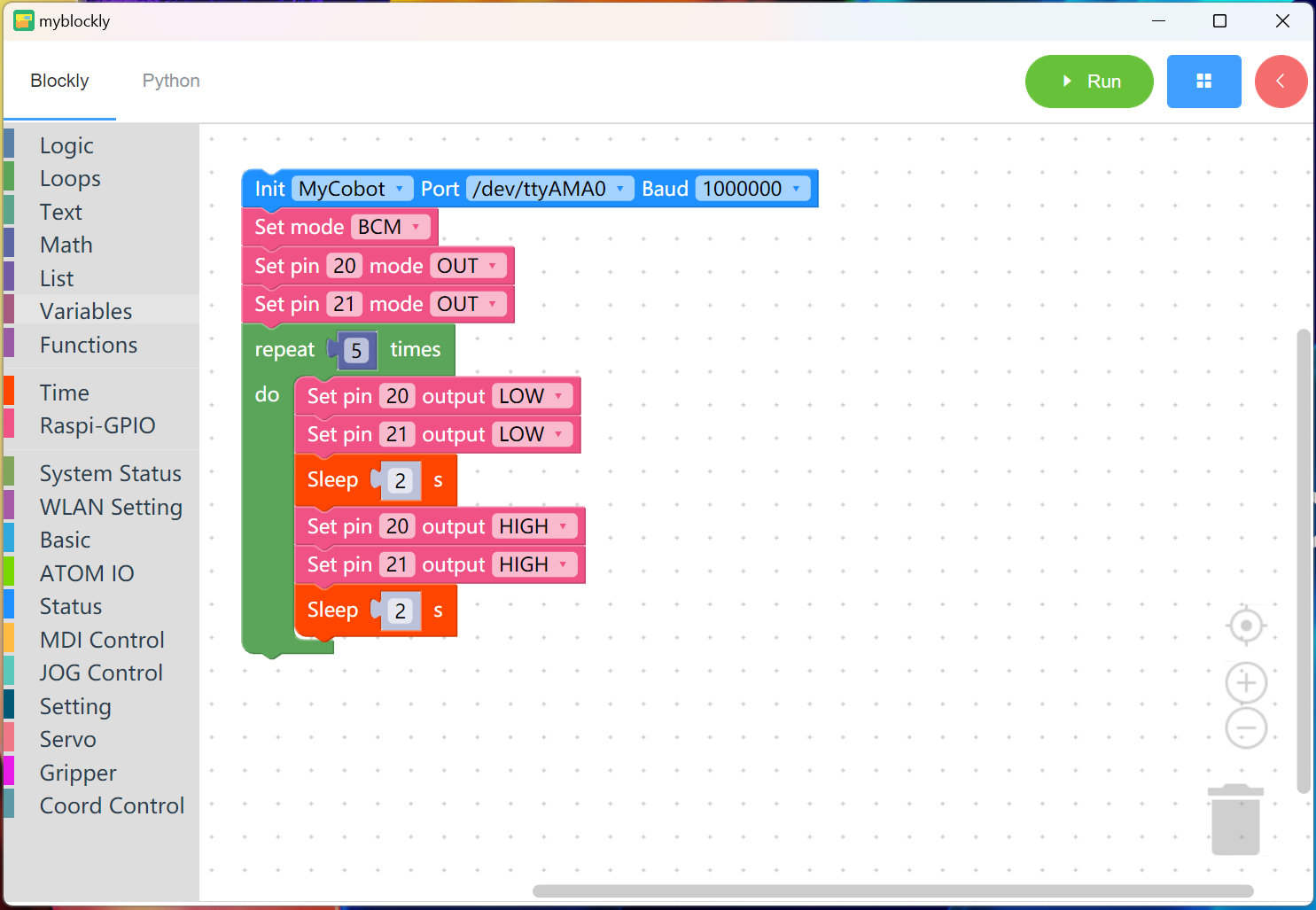
Graphic code is as follows: (for Raspberry Pi version)
Pin 20/21 controls the solenoid valve and the air release valve respectively
Implementation content: First close the solenoid valve and open the air release valve to prepare for starting the suction pump; after two seconds, close the air release valve. After 0.05 seconds, open the solenoid valve, the suction pump vibrates and starts working. The suction pump picks up the object and puts it down after two seconds. Close the air release valve and repeat the previous actions until the program ends.