Gripper test
Before you start
M5Stack series: Make sure the robot arm is connected to the computer
Others: Make sure the machine is normal
To use the gripper test function, myblockly needs to be updated to v3.3.5
Learning content in this chapter
How to use myBlockly to quickly test whether the gripper is normal.
Currently, the gripper test function is only compatible with the following models: myCobot 280 series, mecharm 270 series, myPalletizer 260 series, myArm 300 Pi.
Gripper includes adaptive gripper, electric gripper and pneumatic gripper. Different grippers are compatible with different robot arm models. For details, please refer to Accessories.
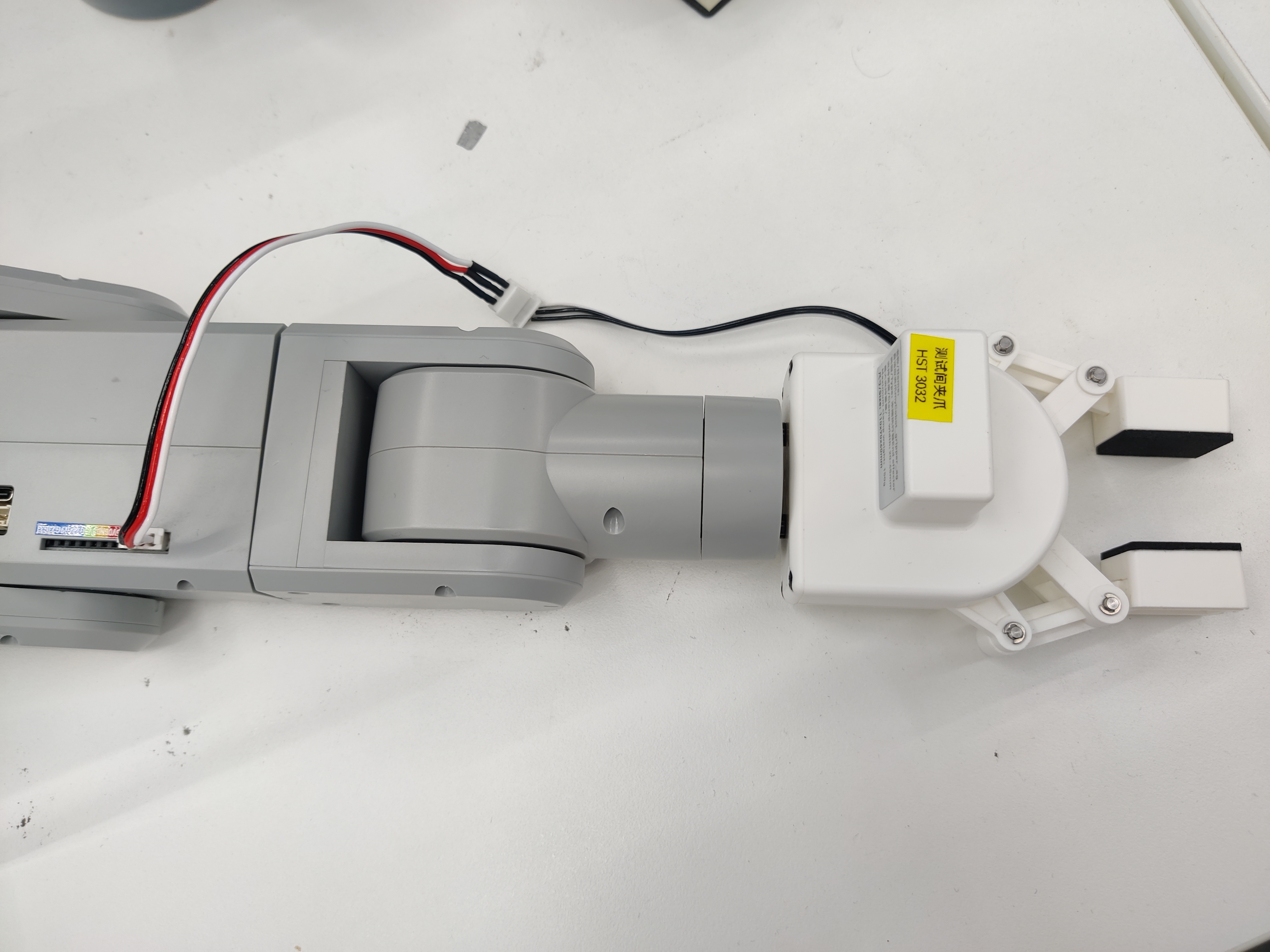
Here, mecharm 270 M5 and adaptive gripper are used as an example.
First install the gripper on the machine
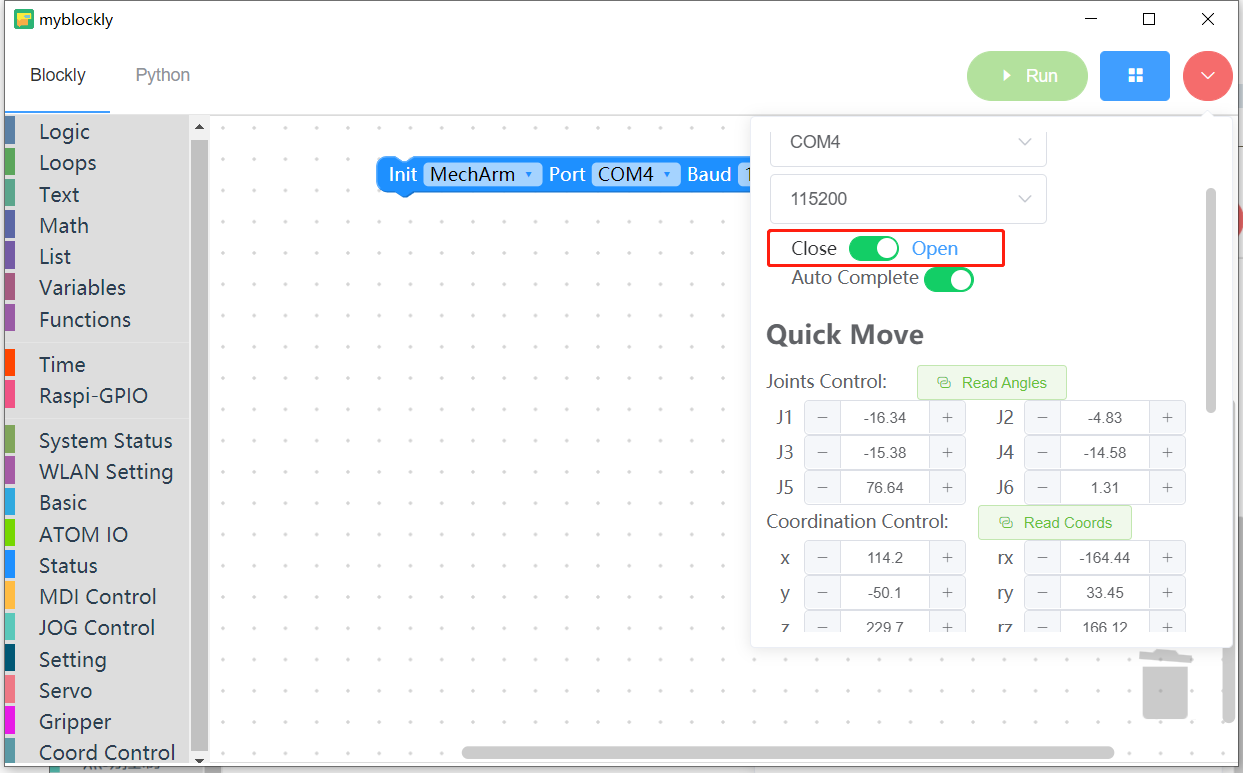
myblockly connects to the machine serial port
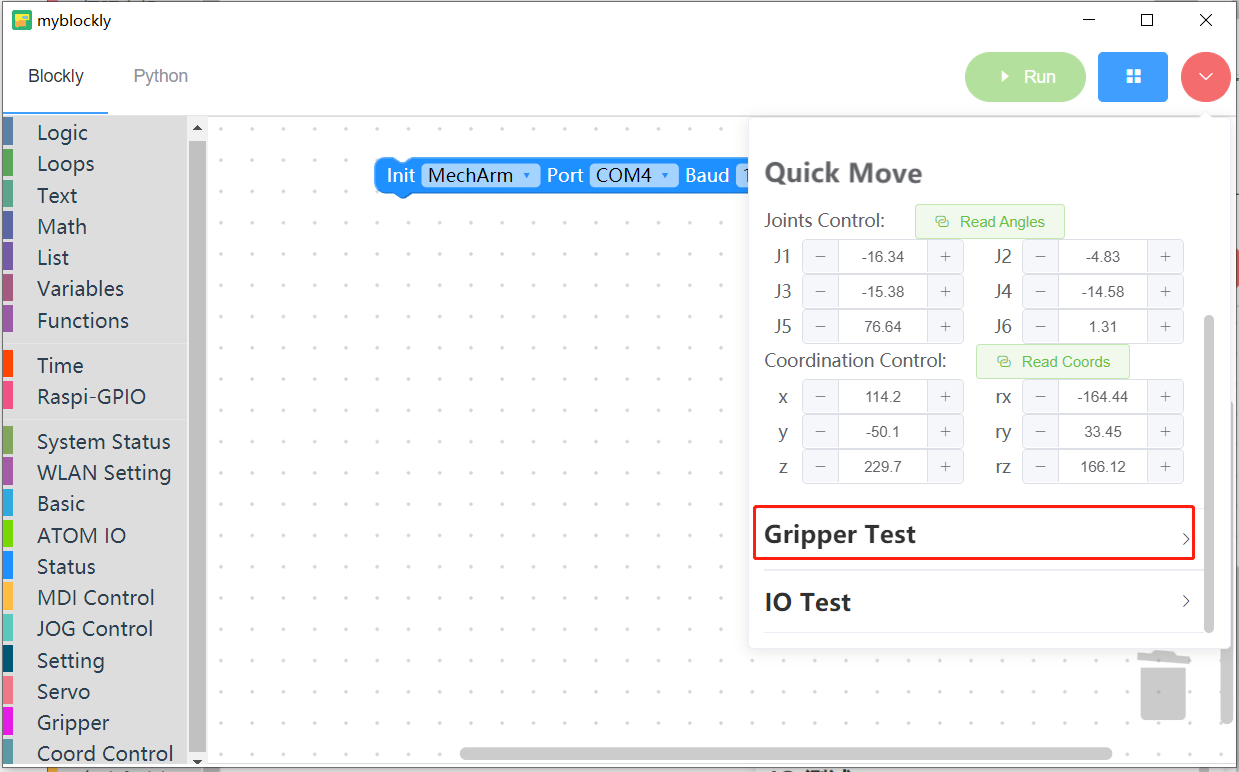
Open the gripper test
Select the current gripper type as Adaptive Girpper
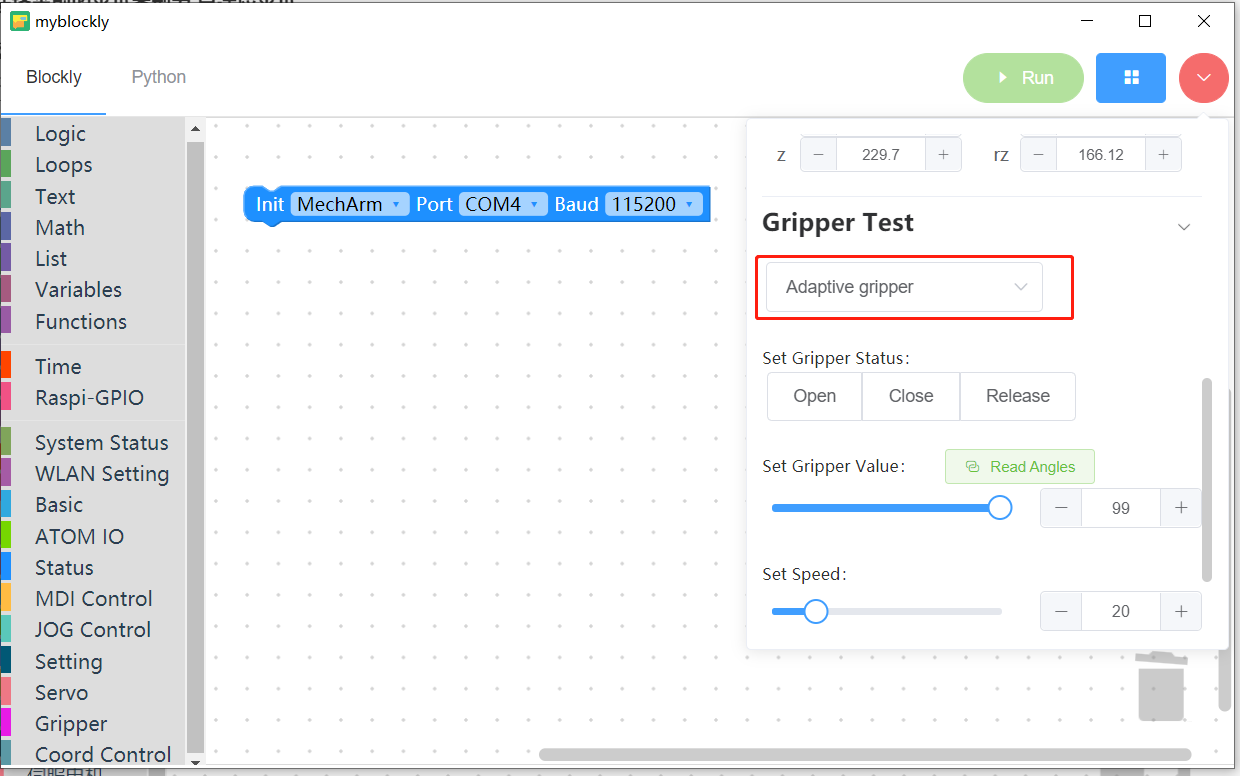
Then you can try the following operations:
Set the gripper state: open, closed, released. Pay attention to the movement of the gripper.
Click the Read Angle button to get the current gripper value.
You can fine-tune the gripper value.
You can set the gripper's moving speed.
Tips: When the gripper type is Dexterous Hand, you cannot set the gripper value, you can only set its status.