correspondence
Our MyarmC650 mainly uses a Topic method for communication
Topic is one of the most commonly used communication mechanisms in ROS, which is based on the publisher-subscriber model, in which one node publishes messages as publishers and other nodes receive messages as subscribers. A publisher can publish messages to multiple subscribers at the same time, and subscribers can receive messages from multiple publishers. This approach is ideal for situations that require real-time data updates, such as processing and real-time control of sensor data.
Start by creating a Publisher in the .py file to post our message to the MyarmC650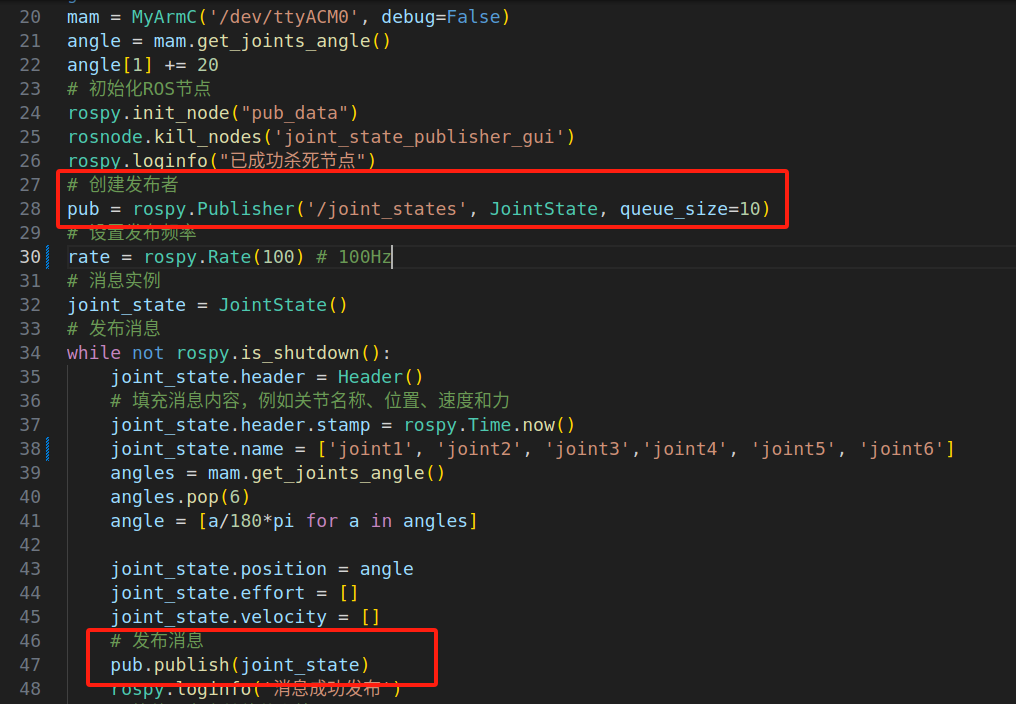
Next, open the terminal in the workspace and start ROS:
roscore
Create another terminal and enter:
soure devel/setup.bash
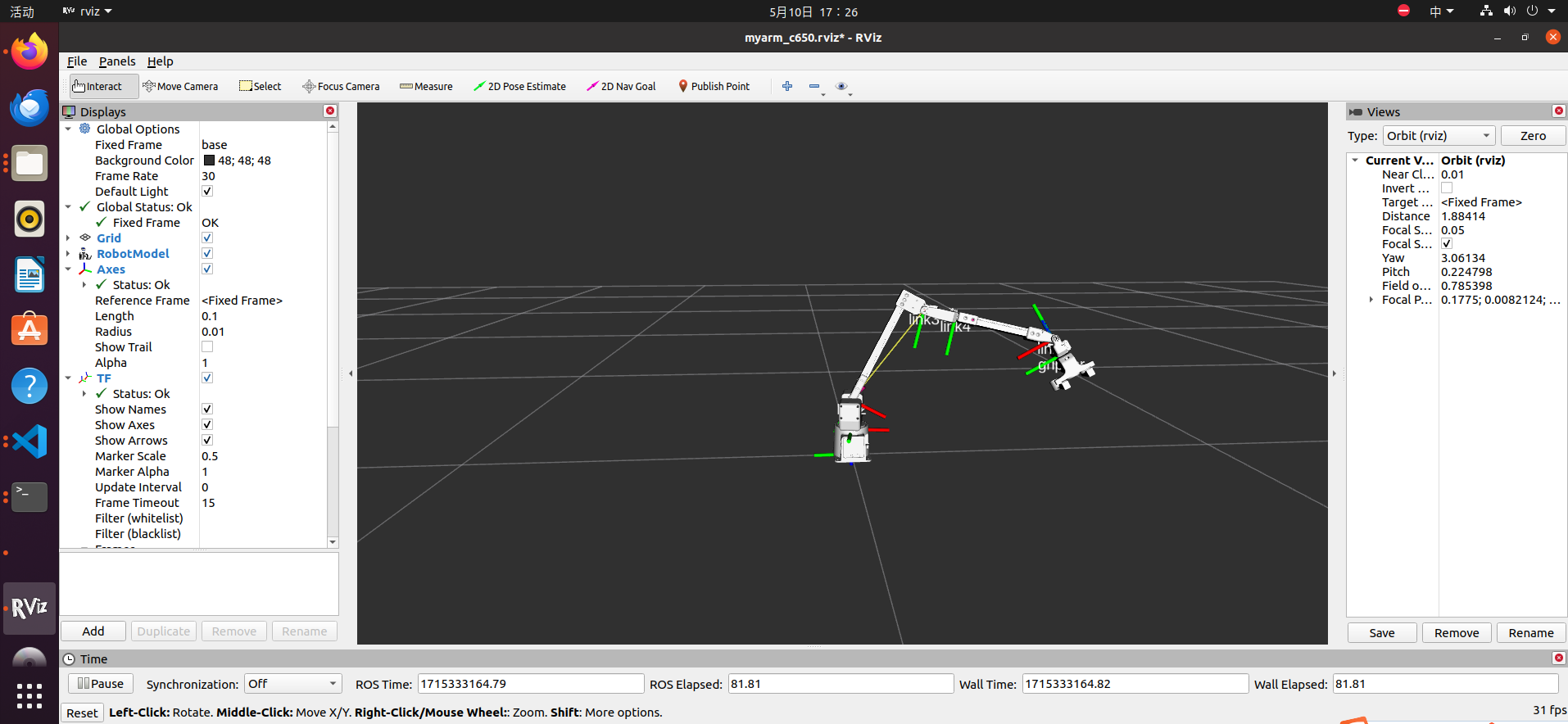
roslaunch myarm_c650 test.launch
Open RVIZ and then launch our test.py file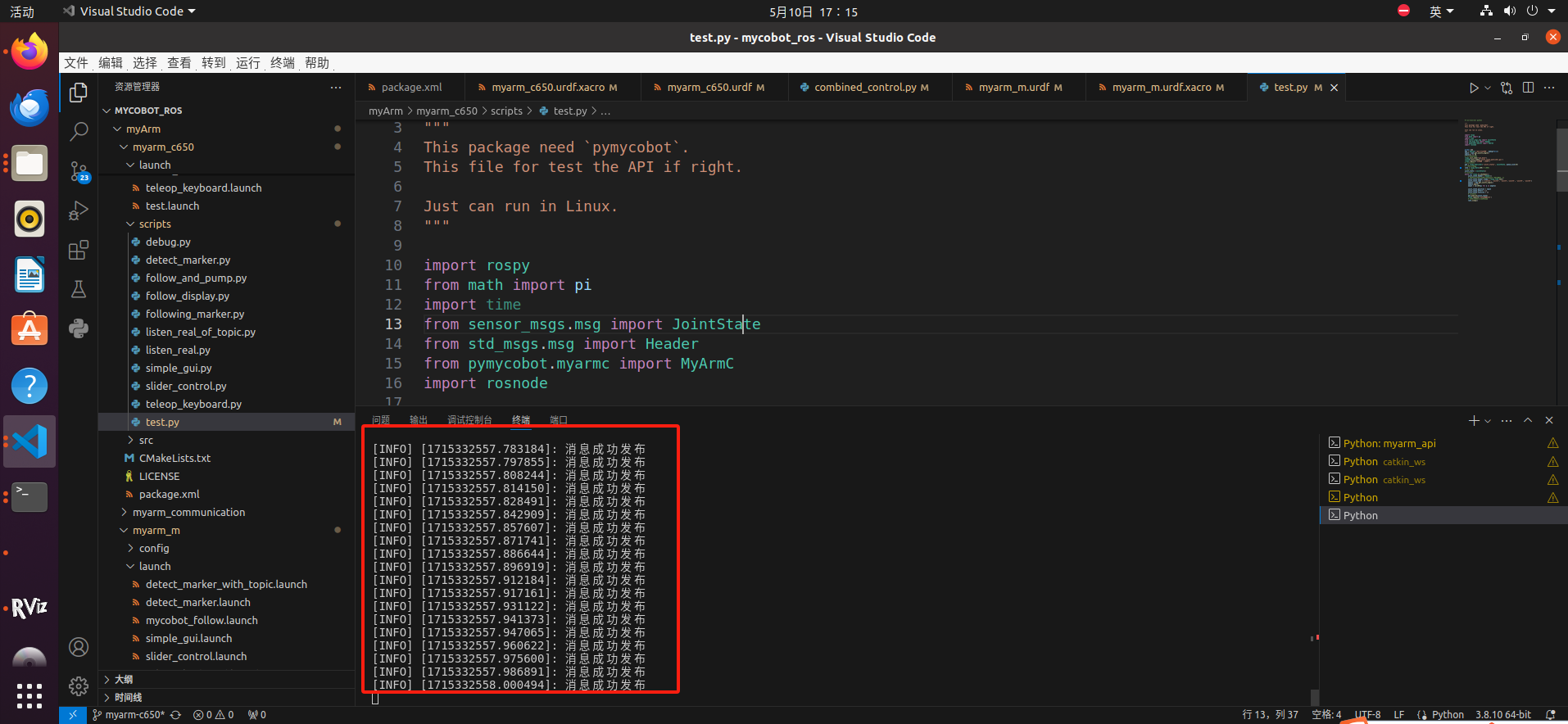
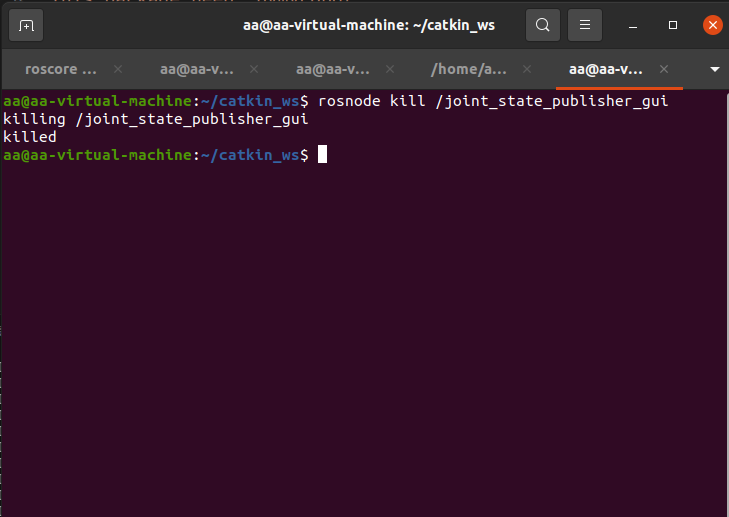
Create another terminal and enter:
rosnode kill /joint_state_publisher_gui
Finally, we open a new terminal and enter:
rqt_graph
We can see all the information about the node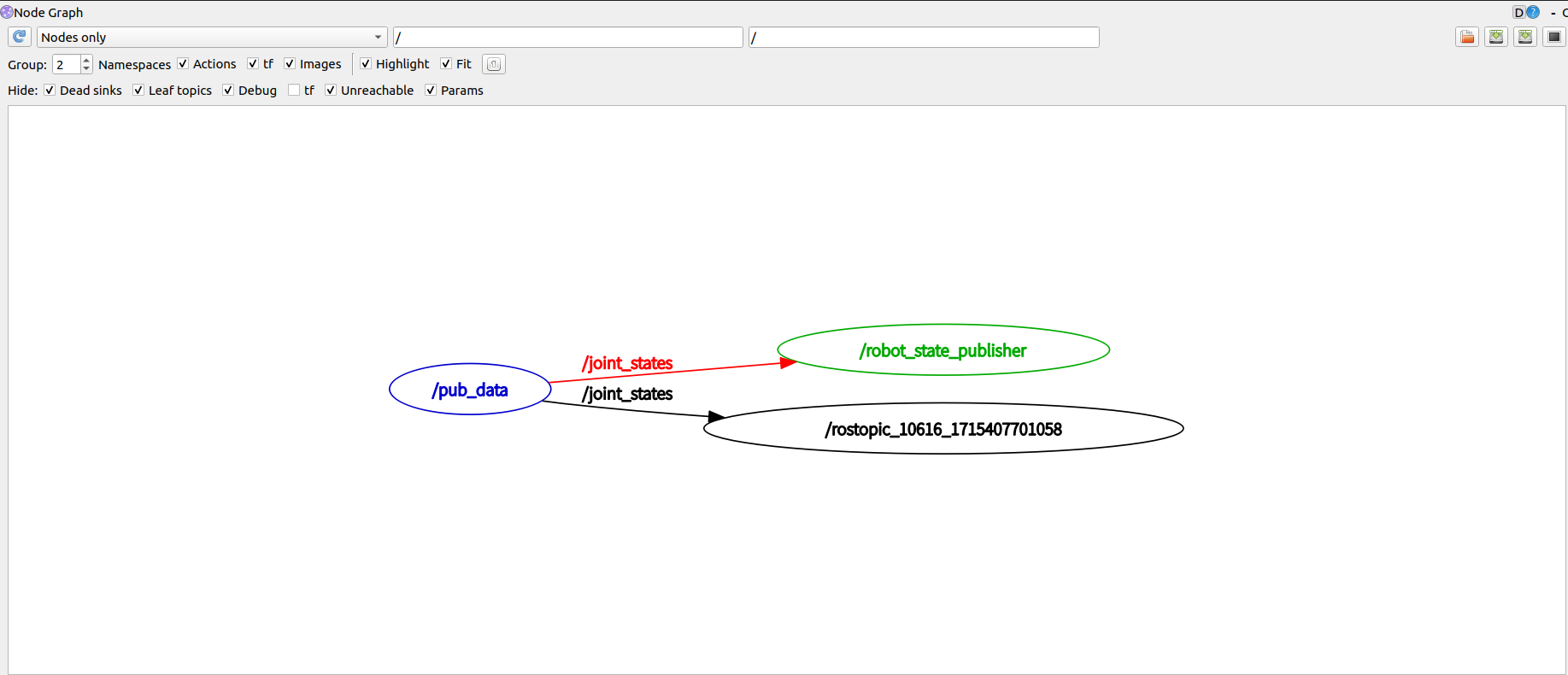
The MyarmC650 is also in a state where it can be manually moved