Basic tool
In this chapter, you will learn about the common command tools of ROS2.
1 Topics
ROS2 breaks complex systems down into many modular nodes. Topics are a vital element of the ROS graph that act as a bus for nodes to exchange messages. Topics are one of the main ways in which data is moved between nodes and therefore between different parts of the system.
Specific reference: Official Tutorials
topics help
ros2 topics -h
Start turtlesim and keyboard control
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
Node Relationship Diagram
rqt_graph
Learn about topic-related commands
ros2 topics -h
topics list
ros2 topic list
ros2 topic list -t # Display the corresponding message typeView topic content
ros2 topic echo
ros2 topic echo /turtle1/cmd_velDisplay topic-related information, type
ros2 topic info
# Output /turtle1/cmd_vel topic related information
ros2 topic info /turtle1/cmd_velDisplay interface related information
ros2 interface show
# Output geometry_msgs/msg/Twist interface related information
ros2 interface show geometry_msgs/msg/TwistIssue an order
ros2 topic pub \
# Issue speed command
ros2 topic pub --once /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"
# Issue speed commands at a certain frequency
ros2 topic pub --rate 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"
2 Nodes
Each node in ROS should be responsible for a single, module purpose (e.g. one node for controlling wheel motors, one node for controlling a laser range-finder, etc). Each node can send and receive data to other nodes via topics, services, actions, or parameters. A full robotic system is comprised of many nodes working in concert. In ROS 2, a single executable (C++ program, Python program, etc.) can contain one or more nodes.
Specific reference: Official Tutorials
nodes help
ros2 nodes -h
Start turtlesim and keyboard control
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_keyView the node list
ros2 node list
View Node Relationship Diagram
rqt_graph
Remapping
ros2 run turtlesim turtlesim_node --ros-args --remap __node:=my_turtle
ros2 node listView node information
ros2 node info \
ros2 node info /my_turtle
3 Services
Services are another method of communication for nodes in the ROS graph. Services are based on a call-and-response model, versus topics’ publisher-subscriber model. While topics allow nodes to subscribe to data streams and get continual updates, services only provide data when they are specifically called by a client.
Specific reference: Official Tutorials
services help
ros2 service -h
Start turtlesim and keyboard control
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_keyView the service list
ros2 service list
# Display service list and message type
ros2 service list -tView the message types received by the service
ros2 service type \
ros2 service type /clearFind services that use a certain message type
ros2 service find \
ros2 service find std_srvs/srv/EmptyView Service Message Type Definitions
ros2 interface show \
ros2 interface show std_srvs/srv/Empty.srvCall the service command to clear the walking track
ros2 service call \
ros2 service call /clear std_srvs/srv/EmptySpawn a new turtle
ros2 service call /spawn turtlesim/srv/Spawn "{x: 2, y: 2, theta: 0.2, name: 'turtle2'}"
4 Parameters
A parameter is a configuration value of a node. You can think of parameters as node settings. A node can store parameters as integers, floats, booleans, strings, and lists. In ROS 2, each node maintains its own parameters. For more background on parameters, please see the concept document.
Specific reference: Official Tutorials
parameters help
ros2 param -h
Start turtlesim and keyboard control
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_keyView service list
ros2 param list
Get the parameter value
ros2 param get \
ros2 param get /turtlesim background_gSet parameter values
ros2 param set \
ros2 param set /turtlesim background_r 150Export parameter values
ros2 param dump \
ros2 param dump /turtlesimImport parameters independently
ros2 param load \
ros2 param load /turtlesim ./turtlesim.yamlStart the node and import parameters at the same time
ros2 run \
ros2 run turtlesim turtlesim_node --ros-args --params-file ./turtlesim.yaml
5 Actions
Actions are one of the communication types in ROS 2 and are intended for long running tasks. They consist of three parts: a goal, feedback, and a result.
Actions are built on topics and services. Their functionality is similar to services, except actions are preemptable (you can cancel them while executing). They also provide steady feedback, as opposed to services which return a single response.
Actions use a client-server model, similar to the publisher-subscriber model (described in the topics tutorial). An “action client” node sends a goal to an “action server” node that acknowledges the goal and returns a stream of feedback and a result.
Specific reference: Official Tutorials
action help
ros2 action -h
Start turtlesim and keyboard control
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
Press G|B|V|C|D|E|R|T to achieve rotation, press F to cancel
View the server and client of the node action
ros2 node info /turtlesim
View action list
ros2 action list
ros2 action list -t # show action typeview action info
ros2 action info \
ros2 action info /turtle1/rotate_absoluteView action message content
ros2 interface show turtlesim/action/RotateAbsolute
Send action target information
ros2 action send_goal \
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 1.57}"
# With feedback information
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 0}" --feedback
6 RQt
RQt is a graphical user interface framework that implements various tools and interfaces in the form of plugins. One can run all the existing GUI tools as dockable windows within RQt! The tools can still run in a traditional standalone method, but RQt makes it easier to manage all the various windows in a single screen layout.
Specific reference: Official Tutorials
You can run any RQt tools/plugins easily by:
rqt
rqt help
rqt -h
tart turtlesim and keyboard control
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_keyAction Type Browser: / Plugins -> Actions ->Action Type Browser
parameter reconfiguration: / Plugins -> configuration ->Parameter Reconfigure
Node grap: /Node Graph
control steering: /Plugins -> Robot Tools -> Robot Steering
service invocation: /Plugins -> Services -> Service Caller
Service Type Browser: Plugins -> Services -> Service Type Browser
message release: Plugins -> Topics -> Message Publisher
Message Type Browser: Plugins -> Topics -> Message Type Browser
topic list: Plugins -> Topics -> Topic Monitor
draw a graph: Plugins -> Visualization -> Plot
View logs: rqt_console
ros2 run rqt_console rqt_console
ros2 run turtlesim turtlesim_node
ros2 topic pub -r 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}"
7 TF2
tf2 is the transform library, which lets the user keep track of multiple coordinate frames over time. tf2 maintains the relationship between coordinate frames in a tree structure buffered in time and lets the user transform points, vectors, etc. between any two coordinate frames at any desired point in time.
Specific reference: Official Tutorials
Let’s start by installing the demo package and its dependencies.
sudo apt-get install ros-foxy-turtle-tf2-py ros-foxy-tf2-tools ros-foxy-tf-transformations
follow
launch starts 2 little turtles, the first little turtle automatically follows the second one
ros2 launch turtle_tf2_py turtle_tf2_demo.launch.py
Control the movement of the first little turtle through the keyboard
ros2 run turtlesim turtle_teleop_key
View TF tree
ros2 run tf2_tools view_frames.py
evince frames.pdfView the relationship between two coordinate systems
ros2 run tf2_ros tf2_echo [reference_frame] [target_frame]
ros2 run tf2_ros tf2_echo turtle2 turtle1View TF relationships on rviz
ros2 run rviz2 rviz2 -d $(ros2 pkg prefix --share turtle_tf2_py)/rviz/turtle_rviz.rviz
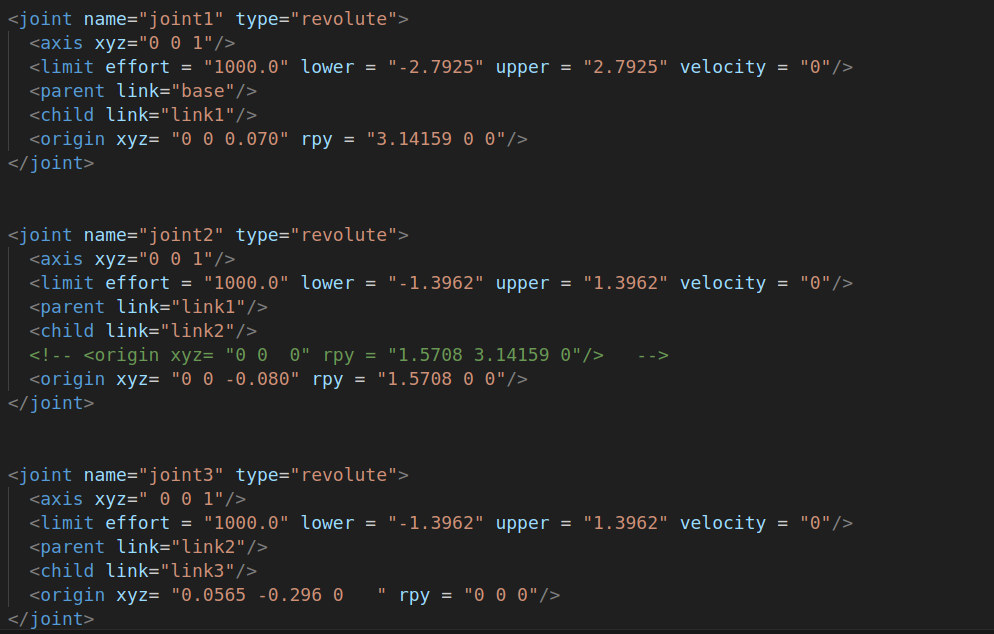
8、Introduction to the URDF
- Unified Robot Description Format,The Unified Robot Description Format, or URDF for short. The urdf feature pack in ROS contains a C++ parser for URDF, and URDF files describe the robot model in XML format.
- URDF cannot be used on its own and needs to be combined with Rviz2 or Gazebo, URDF is just a file that needs to be rendered as a graphical robot model in Rviz2 or Gazebo.
8.1 urdf file description
Code examples:
Only some of the codes are screenshotted for display: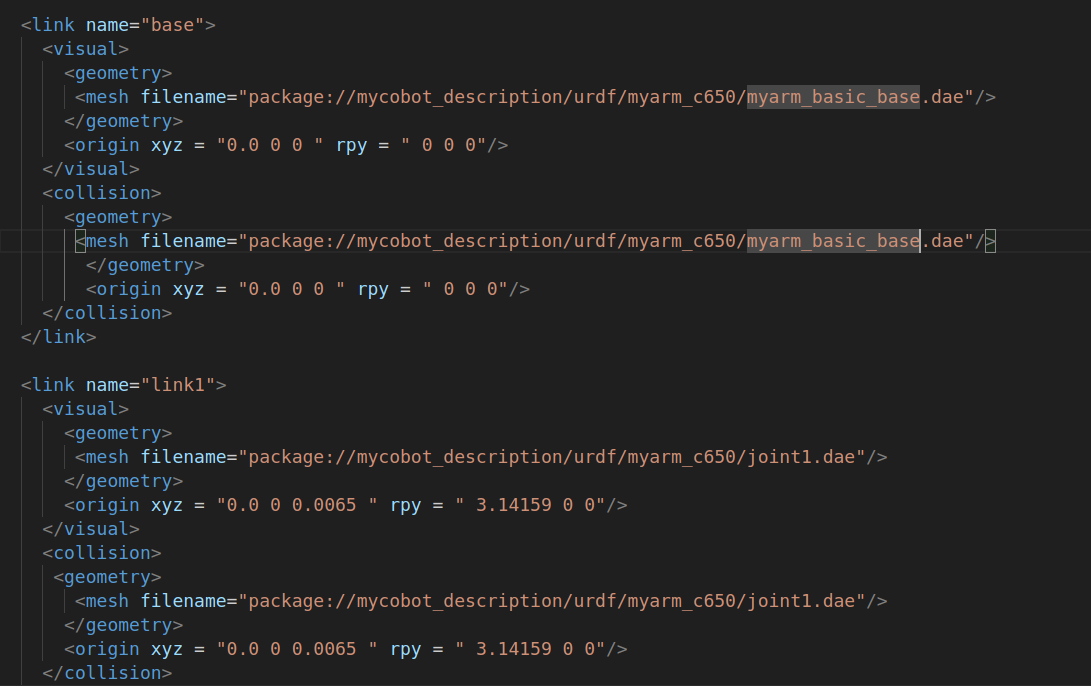
Install dependent libraries
sudo apt install ros-foxy-joint-state-publisher-gui ros-foxy-joint-state-publisher
sudo apt install ros-foxy-xacroDownload the source code
cd ~/dev_ws
git clone -b ros2 https://github.com/ros/urdf_tutorial.git src/urdf_tutorialCompiling the source code
colcon build --packages-select urdf_tutorial
Running the example
ros2 launch urdf_tutorial display.launch.py model:=urdf/01-myfirst.urdf