电气特性参数
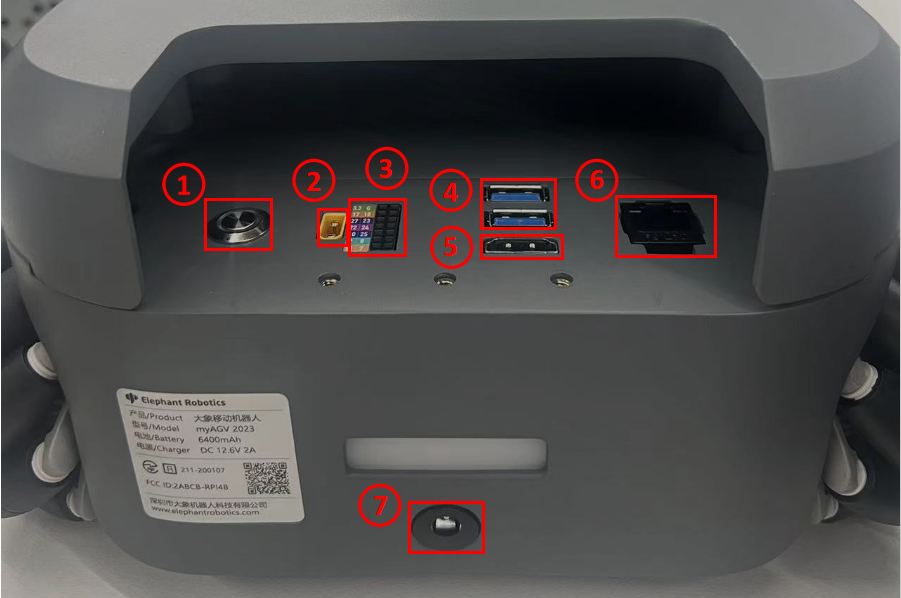
1 表面电气接口概述
| 序号 | 接口 | 定义 | 功能 | 备注 |
|---|---|---|---|---|
| 1 | 开关 | control input power on and off | With lights (lights on) | |
| 2 | Power supply interface of robot arm | Supply power to my series robot arm (12V 5A) | ||
| 3 | DC/IO interface | 3.3 | DC3.3V | |
| 17 | GPIO 17 | |||
| 27 | GPIO 27 | |||
| 22 | GPIO 22 | |||
| 10 | GPIO 10 | |||
| 9 | GPIO 9 | |||
| 11 | GPIO 11 | |||
| G | GND | |||
| 10 | GPIO 10 | |||
| 23 | GPIO 23 | |||
| 24 | GPIO 24 | |||
| 25 | GPIO 25 | |||
| 8 | GPIO 8 | |||
| 7 | GPIO 7 | |||
| 4 | USB2.0 | USB2.0*2 | 可与外部设备或 U 盘连接 | |
| 5 | HDMI | 用于连接屏幕 | ||
| 6 | 网络端口 | Ethereum | 以太网端口通信 | |
| 7 | 电源直流输入接口 | DC 12V | 电源输入 |
1.1 开关:电源开关用于控制主电源输入。如果电源开关关闭,控制器也将断电。
1.2 机械臂电源接口:香蕉插头母头,型号 XT30UPB-F,为我的系列机械臂供电(12V 5A)。
1.3 DC/IO 接口:IO 接口组为 2.54 毫米杜邦接口,可从外部使用 2.54 毫米杜邦线。
| 标签 | 信号 | 类型 | 功能 | 说明 |
|---|---|---|---|---|
| 3.3 | 3.3V | P | DC 3.3V | |
| 17 | GPIO17 | I/O | GPIO17 | |
| 27 | GPIO27 | I/O | GPIO27 | |
| 22 | GPIO22 | I/O | GPIO22 | |
| 10 | GPIO10 | I/O | GPIO10 | |
| 9 | GPIO9 | I/O | GPIO9 | |
| 11 | GPIO11 | I/O | GPIO11 | |
| G | GND | p | GND | |
| 18 | GPIO18 | I/O | GPIO18 | |
| 23 | GPIO23 | I/O | GPIO23 | |
| 24 | GPIO24 | I/O | GPIO24 | |
| 25 | GPIO25 | I/O | GPIO25 | |
| 08 | GPIO8 | I/O | GPIO8 | |
| 07 | GPIO7 | I/O | GPIO7 |
注意:
I: 仅作为输入
I/O: 该功能信号包括输入和输出组合。
单管角设置为输出端时,将输出 3.3V 电压。
单管角的源电流随着引脚数的增加而减小,从约 40mA 减小到 29mA。
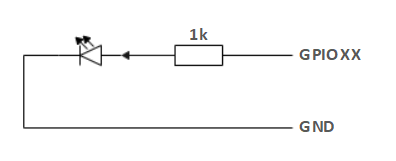
如果将某个 GPIO 设置为输出模式并输出高电平信号,与 LED 连接的电路如图 2 所示,LED 就会亮起。
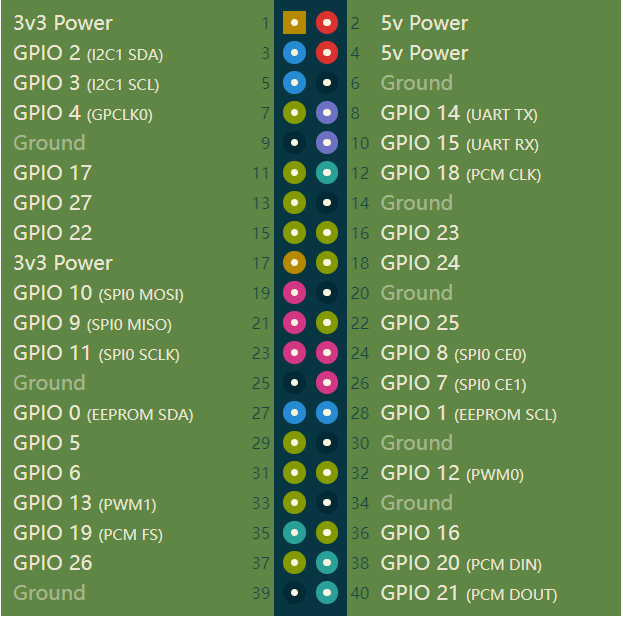
- 在使用其他功能的情况下,IO 功能不可用,功能界面的其他功能表如图 3 所示。
1.4 USB2.0:主线标准为 2.0 接口的串行端口。USB 端口用于复制程序文件和连接鼠标、键盘等外围设备。
1.5 HDMI:HDMI D 型端口连接显示器。
1.6 网络端口:用于网络数据连接的端口。以太网接口可用于 PC 与机器人系统之间的通信,或与其他设备进行以太网通信。
1.7 电源 DC 输入接口:使用 DC 2.5*5.5 电源接口;可使用厂家提供的 12.6V2A DC 电源适配器为 myAGV 充电。
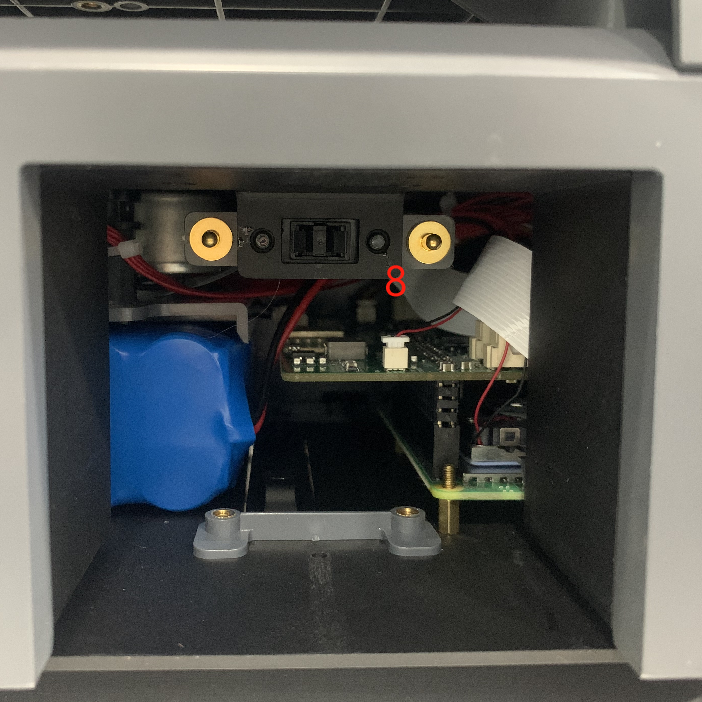
2 弹仓电气接口概述

| 序号 | 接口 | 定义 | 功能 | 备注 |
|---|---|---|---|---|
| 8 | 备用电池端口 | 连接备用电池 | ||
| 9 | 抽吸泵接口 | 连接吸入泵,控制吸入泵工作 |