myAGV+280Pi复合机器人
原理说明:AGV和机械臂采取socket通信,AGV通过判断自身的导航状态,从而控制机械臂执行相应的动作
1 硬件安装
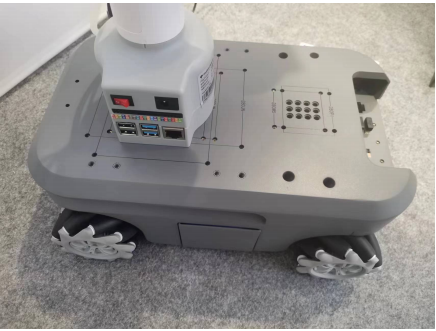
安装机械臂
首先需要将机械臂安装到 myAGV,可使用乐高键或螺丝将机械臂安装在 myAGV 上部的位置,可以根据自己需求安装在前部或后部。
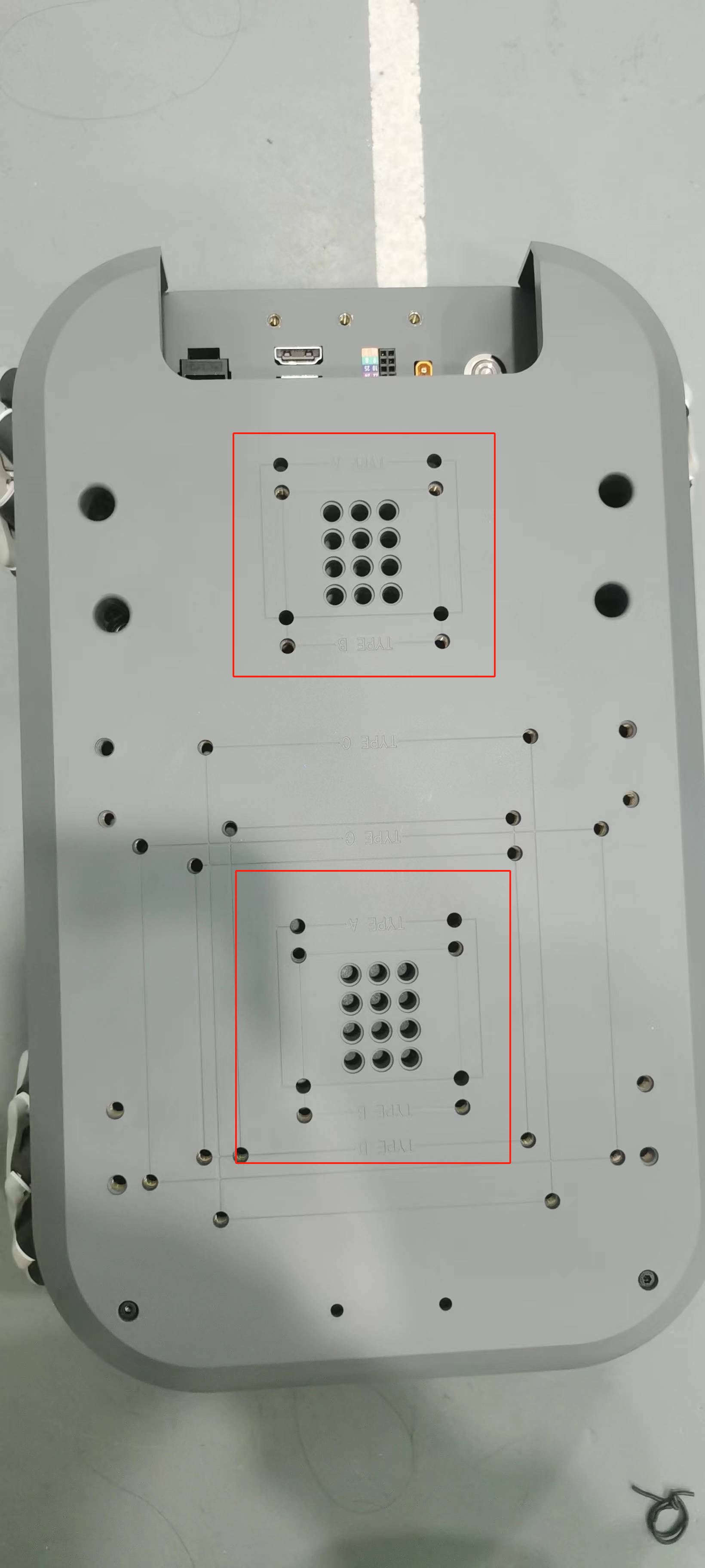
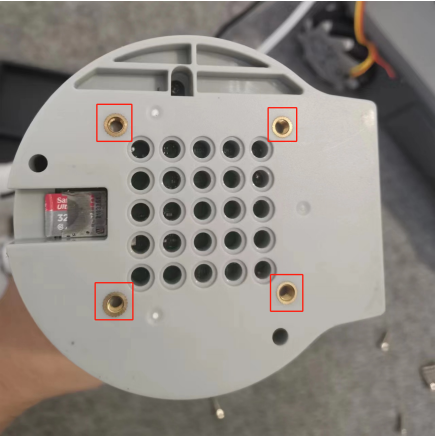
1.用六角扳手将这四颗 m4*8 内六角螺丝拆卸下来
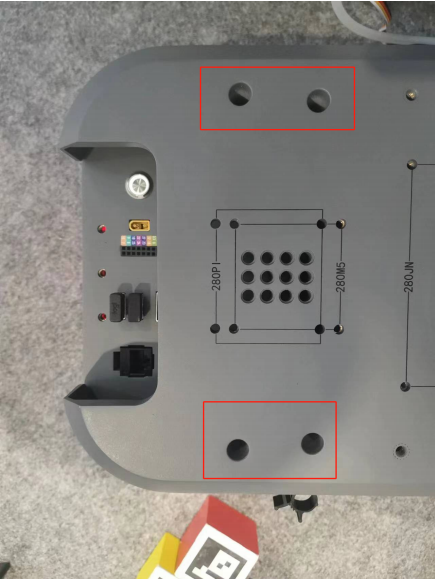
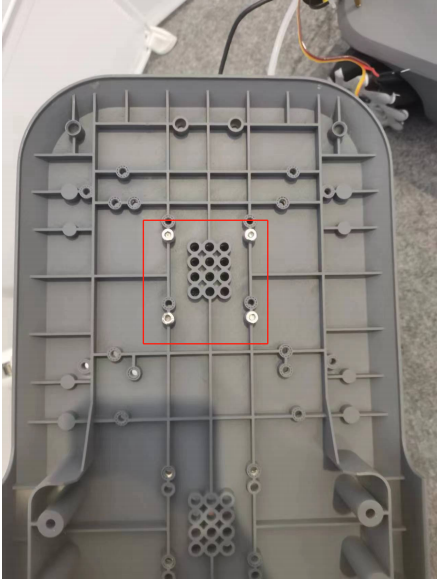
2.将 myCobot 280Pi 机械臂的 X 轴对应的正确方向进行安装,并拧上四颗 m4*8 固定 280Pi。
电源连接
将12V电源线带端子的一头接到AGV的12V输出接口上
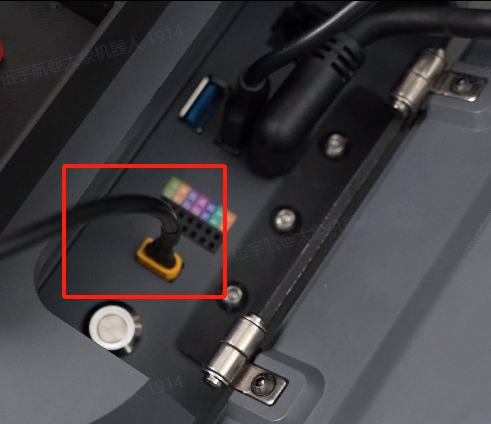
另一端接到机器人的电源输入上

2 软件连接
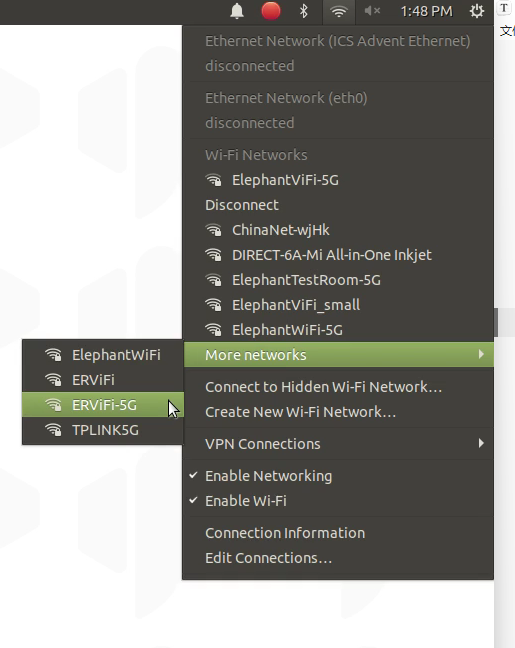
机械臂和AGV在外接显示器和键盘鼠标后,先连接到同一个wifi热点下
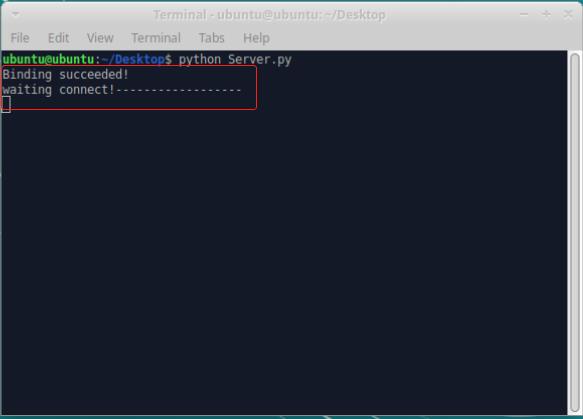
然后机械臂先要运行服务器脚本,打开终端运行下面命令
python Server.py
SSH 远程 使用SSH后,即可脱离显示器进行操作 下载 MobaXterm 软件:https://mobaxterm.mobatek.net/download.html 打开 MobaXterm 软件,按照以下步骤:
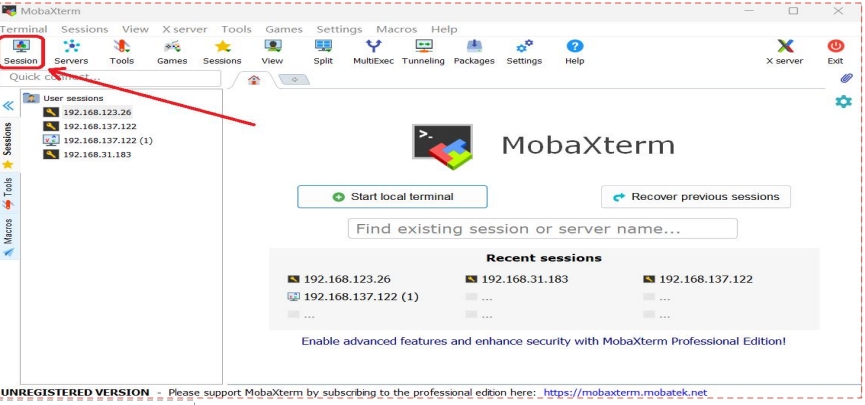
点击SSH图标
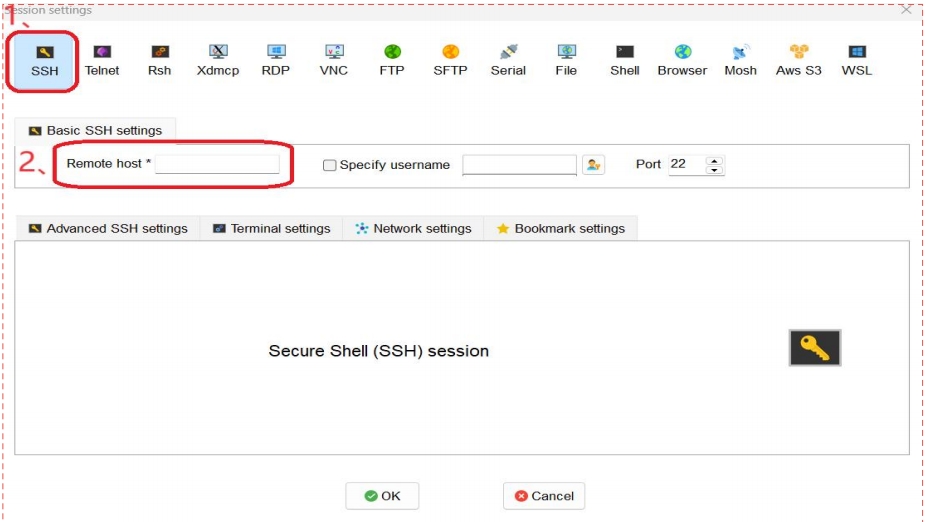
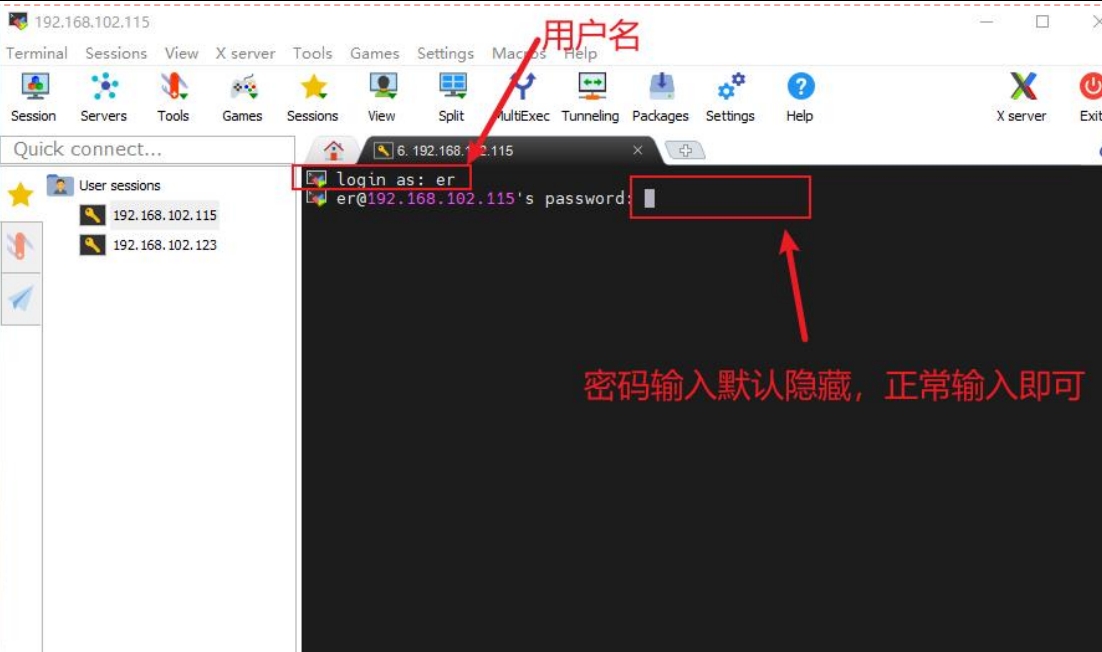
输入myAGV的IP地址(例如:192.168.123.26),然后点击OK,出现下图界面,点击对应IP进行密码登录。
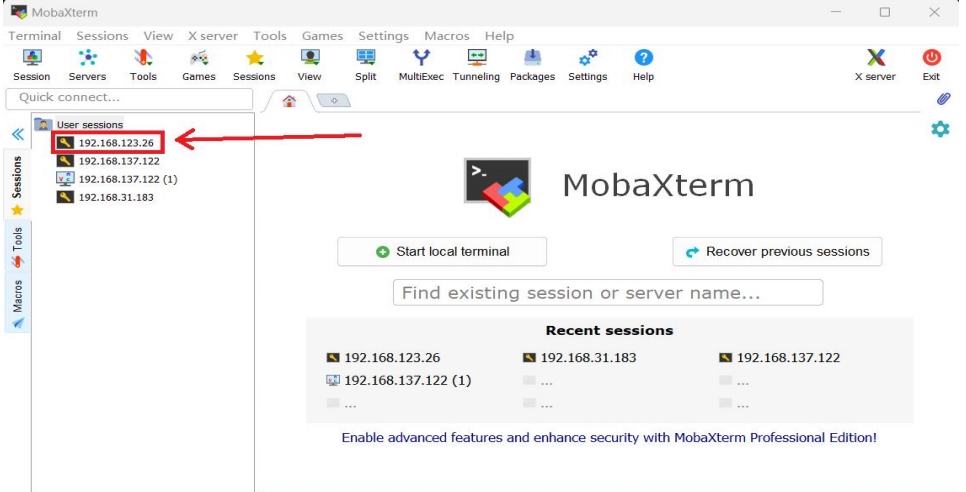
在该界面键盘输入用户名:er,密码:Elephant
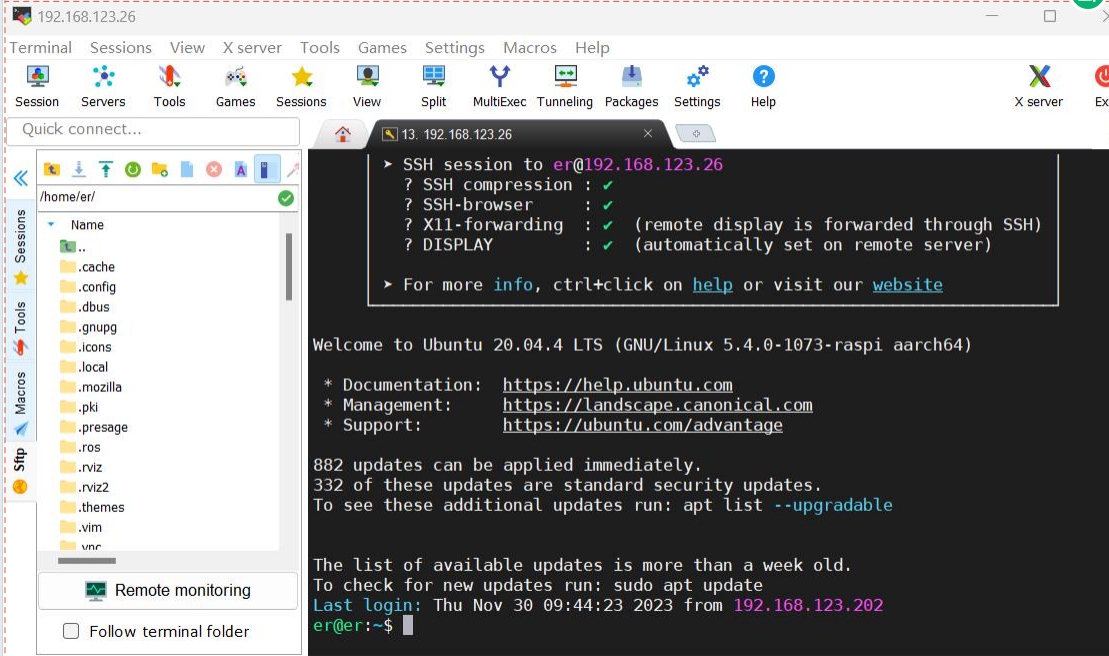
连接成功如下图所示
3 单元测试
机械臂测试
在AGV上新建一个python脚本,然后复制下面的内容后运行脚本,
from pymycobot import MyCobotSocket
import time
arm=MyCobotSocket("192.168.1.248")#填写机械臂的无线IP
arm.send_angles([0,0,0,0,0,0],50)#机械臂回到各个关节的零点位置
time.sleep(2)
arm.send_angles([0,0,0,0,0,-90],50)#机械臂关节6移动-90°
AGV测试
启动小车控制节点
//跳转到激光雷达启动目录
cd myagv_ros/src/myagv_odometry/scripts
//上电使能雷达,上电后雷达就会通过串口发送数据
./start_ydlidar.sh
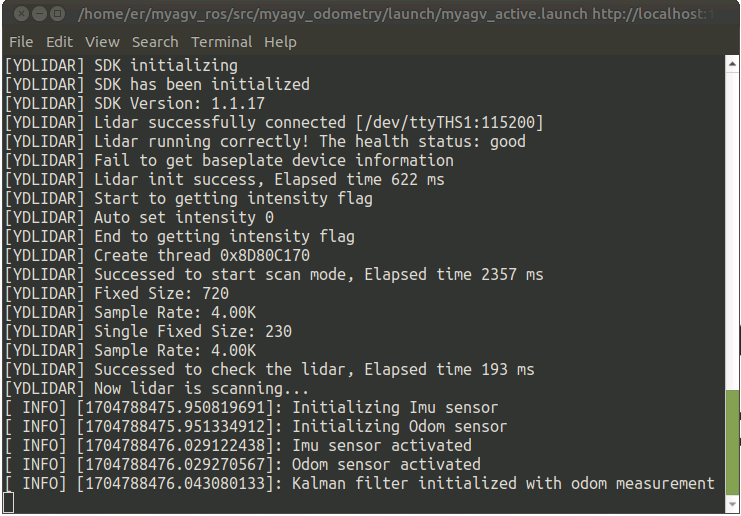
启动键盘控制节点
roslaunch myagv_odometry myagv_active.launch
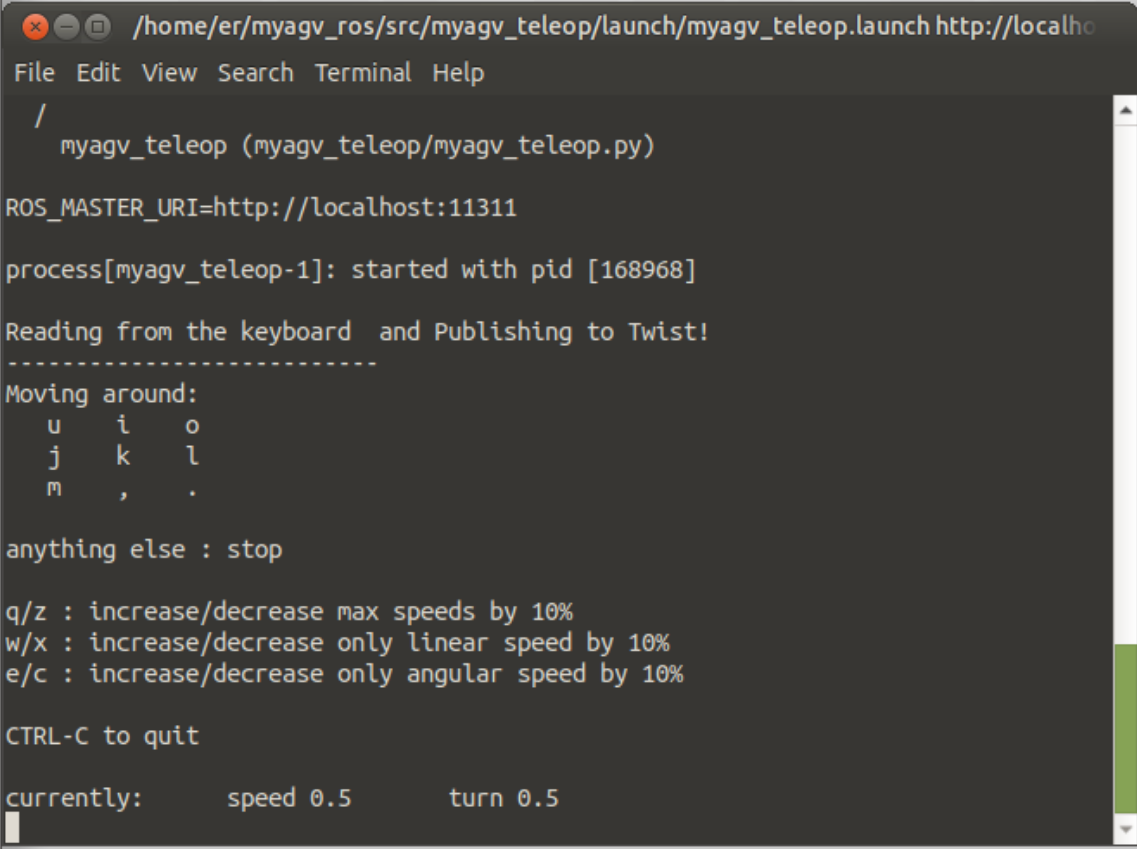
| 按键 | 方向 |
|---|---|
| i | 向前移动 |
| , | 向后移动 |
| j | 向左移动 |
| l | 向右移动 |
| u | 逆时针旋转 |
| o | 顺时针旋转 |
| k | 停止 |
| m | 顺时针反向旋转 |
| . | 逆时针反向旋转 |
| q | 提高线速度和角速度 |
| z | 降低线速度和角速度 |
| w | 提高线速度 |
| x | 降低线速度 |
| e | 增加角速度 |
| c | 降低角速度 |
启动建图节点
roslaunch myagv_navigation myagv_slam_laser.launch
 注意:使用键盘操作小车时,请确保运行 myagv_teleop.launch 文件的终端是当前选定的终端;否则,键盘控制程序将无法识别按键。
注意:使用键盘操作小车时,请确保运行 myagv_teleop.launch 文件的终端是当前选定的终端;否则,键盘控制程序将无法识别按键。
启动保存地图节点 在地图建好后,运行下面指令保存建好的地图
rosrun map_server map_saver -f /home/er/myagv_ros/src/myagv_navigation/map/map
4 复合应用
启动导航节点
roslaunch myagv_navigation navigation_active.launch
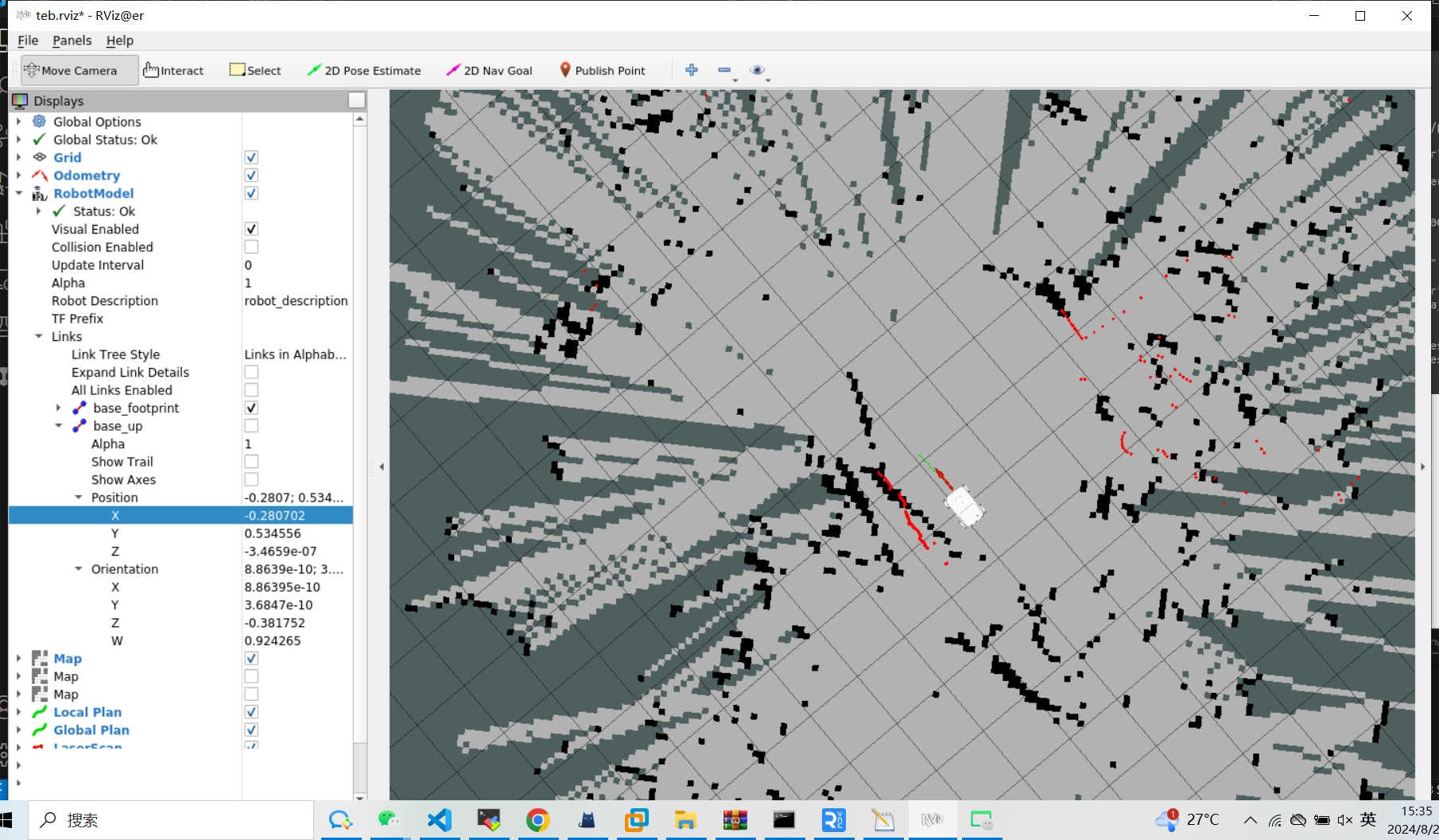
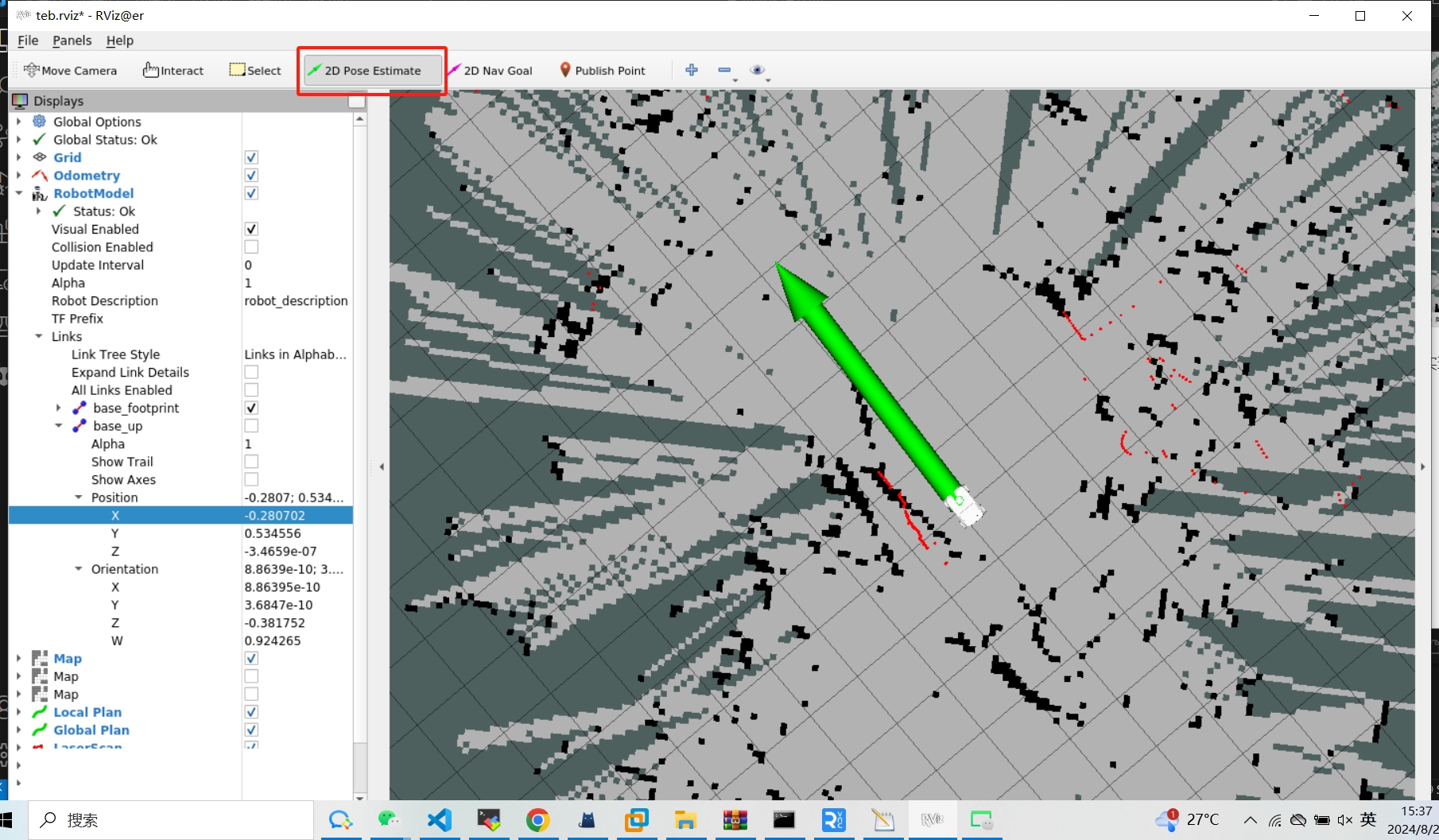
点击顶部工具栏的“2D Pose Estimate” 进行调整,使得Rviz界面的小车和实现的小车可对应上
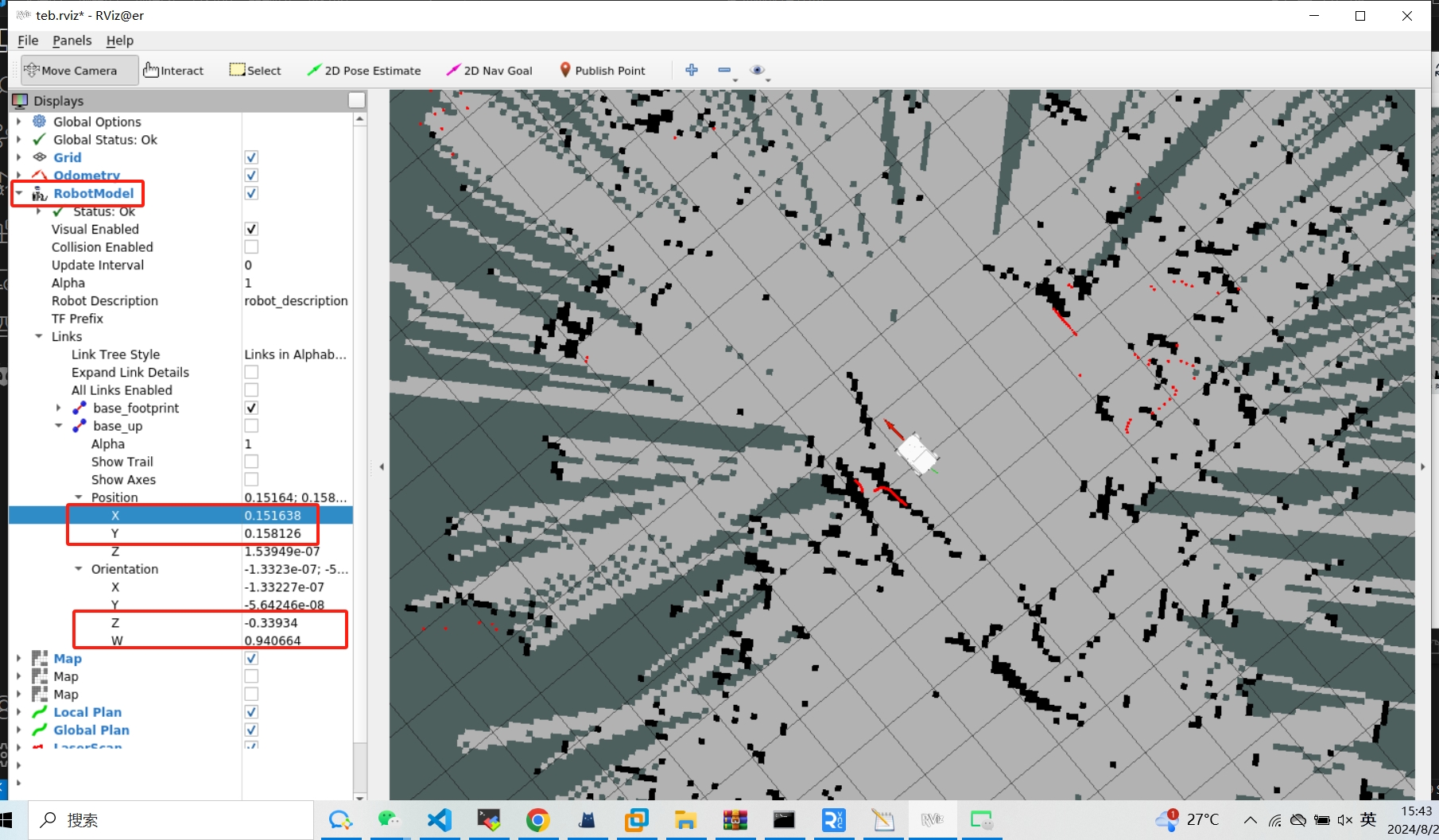
使用键盘节点将AGV开往目的地,点击RobotModel,并记录下AGV在目的地的位姿信息,之后再用键盘节点将AGV驶离目的地
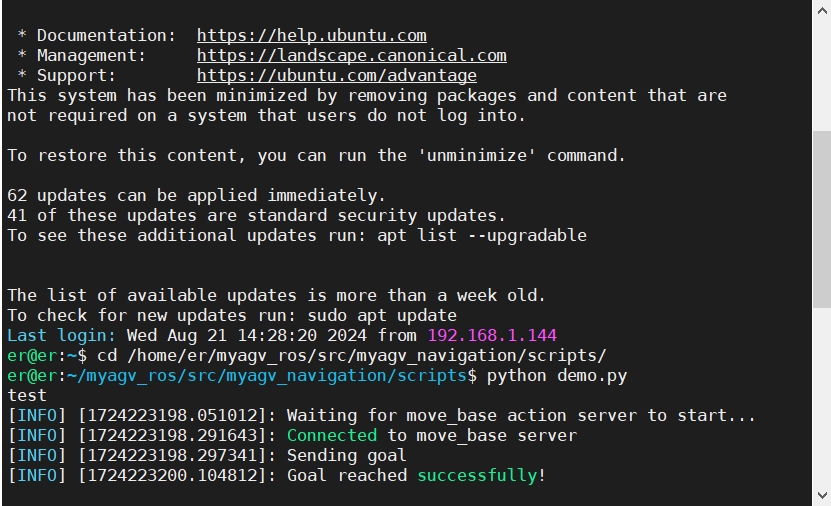
然后先新建一个python脚本,将下面内容复制到脚本内,之后在当前路径运行脚本即可
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
import actionlib
from move_base_msgs.msg import MoveBaseAction, MoveBaseGoal
from geometry_msgs.msg import Point, Quaternion
from pymycobot import MyCobotSocket
import time
m = MyCobotSocket("192.168.1.118") # 填写机械臂的无线IP
rospy.init_node('send_goal_node', anonymous=True)
def send_goal(x, y, z, w, frame_id='map'):
# 初始化节点
# 创建action client
client = actionlib.SimpleActionClient('move_base', MoveBaseAction)
# 等待action server启动
rospy.loginfo("Waiting for move_base action server to start...")
client.wait_for_server()
rospy.loginfo("Connected to move_base server")
for i in range(3):
# 创建目标
goal = MoveBaseGoal()
goal.target_pose.header.frame_id = frame_id
goal.target_pose.header.stamp = rospy.Time.now()
# 定义目标位置和方向
goal.target_pose.pose.position = Point(x, y, 0.0)
goal.target_pose.pose.orientation = Quaternion(0.0, 0.0, z, w)
# 发送目标
rospy.loginfo("Sending goal")
client.send_goal(goal)
# 等待结果
wait = client.wait_for_result(rospy.Duration(60.0))
if wait:
result = client.get_result()
if client.get_state() == actionlib.GoalStatus.SUCCEEDED:
rospy.loginfo("Goal reached successfully!")
m.sync_send_angles([0, 0, 0, 0, 0, 0], 50) # 机械臂动作
break # 成功后退出循环
else:
rospy.loginfo("Failed to reach the goal. Retrying...")
time.sleep(2) # 等待2秒后重试
else:
rospy.loginfo("Action server not available! Retrying...")
time.sleep(2) # 等待2秒后重试
if __name__ == '__main__':
try:
# 示例目标位置
send_goal(0.244428, 0.152124, -0.390851, 0.920454)
except rospy.ROSInterruptException:
rospy.loginfo("Navigation test interrupted.")
5 效果展示
AGV会从当前位置导航到目的地,在成功到达目的地后,机械臂会执行各个关节回到零位的动作