基于 ROS 的基本控制
基本控制包括 键盘控制和操纵杆控制。我们先来讨论键盘控制方法:
- 1 启动小车底层的通信。
首先,检查激光雷达是否已通电并启用。如果没有接通电源,请使用终端通过脚本文件接通电源并启动激光雷达。如果激光雷达已经接通电源并正在旋转,则可以跳过接通电源并启用激光雷达(./start_ydlidar.sh)的步骤。
cd myagv_ros/src/myagv_odometry/scripts
./start_ydlidar.sh
打开激光雷达电源后,打开终端控制台(快捷键Ctrl+Alt+T),在命令行中输入以下命令:
roslaunch myagv_odometry myagv_active.launch
打开 SLAM 激光扫描和小车车轮所需的启动文件。如果您看到
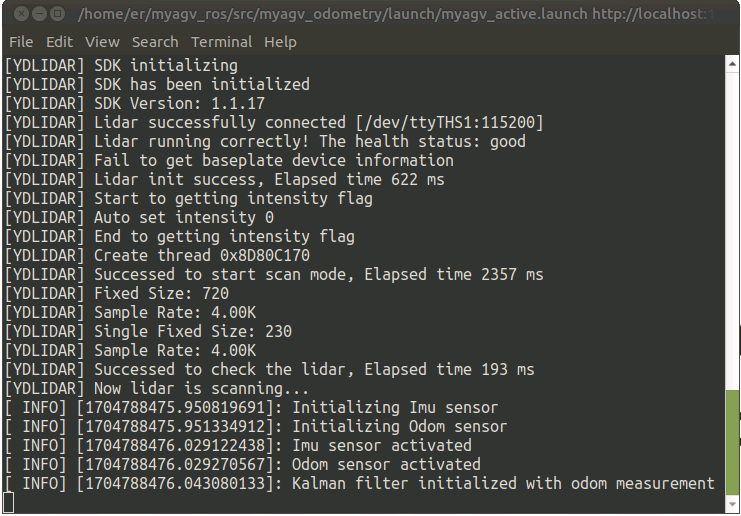
myAGV initialized successful! ...... Now YDLIDAR is scanning ......
它表示汽车激光雷达和车轮之间的通信成功。终端将显示如下状态:
- 2 启动键盘通信
打开一个新的终端控制台,在终端命令行中输入以下命令:
roslaunch myagv_teleop myagv_teleop.launch
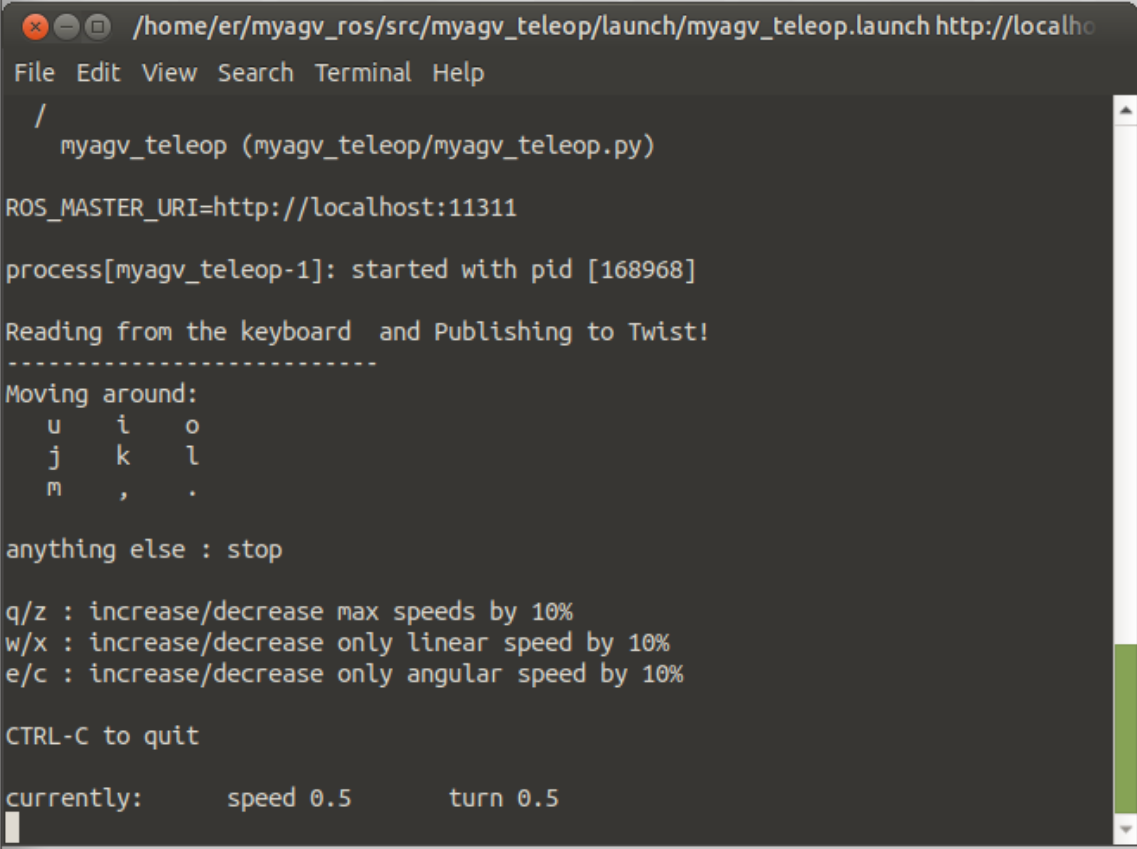
| 按键 | 方向 |
|---|---|
| i | 向前移动 |
| , | 向后移动 |
| j | 向左移动 |
| l | 向右移动 |
| u | 逆时针旋转 |
| o | 顺时针旋转 |
| k | 停止 |
| m | 顺时针反向旋转 |
| . | 逆时针反向旋转 |
| q | 提高线速度和角速度 |
| z | 降低线速度和角速度 |
| w | 提高线速度 |
| x | 降低线速度 |
| e | 增加角速度 |
| c | 降低角速度 |
操纵杆控制
- 1 启动小车底层的通信。
首先,检查激光雷达是否已通电并启用。如果没有接通电源,请使用终端通过脚本文件接通电源并启动激光雷达。如果激光雷达已经接通电源并正在旋转,则可以跳过接通电源并启用激光雷达(./start_ydlidar.sh)的步骤。
cd myagv_ros/src/myagv_odometry/scripts
./start_ydlidar.sh
打开激光雷达电源后,打开终端控制台(快捷键Ctrl+Alt+T),在命令行中输入以下命令:
roslaunch myagv_odometry myagv_active.launch
打开 SLAM 激光扫描和汽车车轮所需的启动文件。如果您看到
myAGV initialized successful! ...... Now YDLIDAR is scanning ......
它表示汽车激光雷达和车轮之间的通信成功。终端将显示如下状态:
- 2 启动操纵杆控制文件
目前支持两种操纵杆,每种操纵杆需要运行不同的文件。
- 1 型操纵杆
将蓝牙操纵杆的 USB 接收器插入汽车。打开一个新的终端控制台,在命令行中输入以下命令:
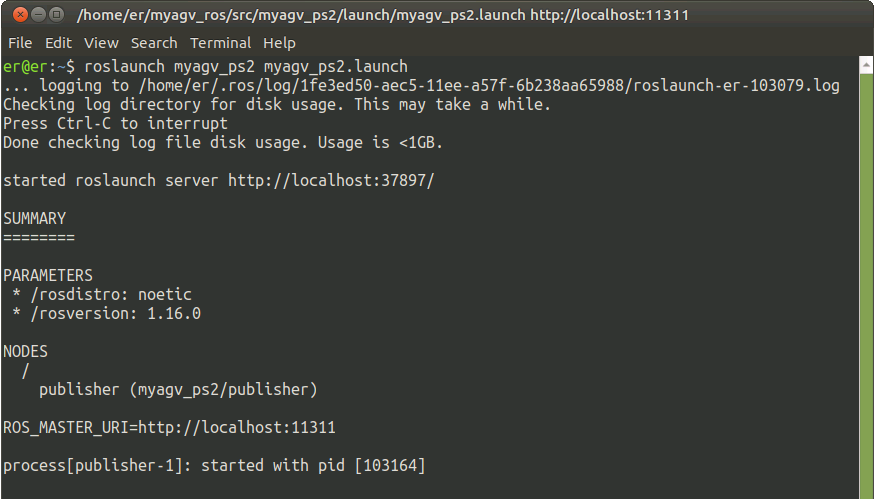
roslaunch myagv_ps2 myagv_ps2.launch
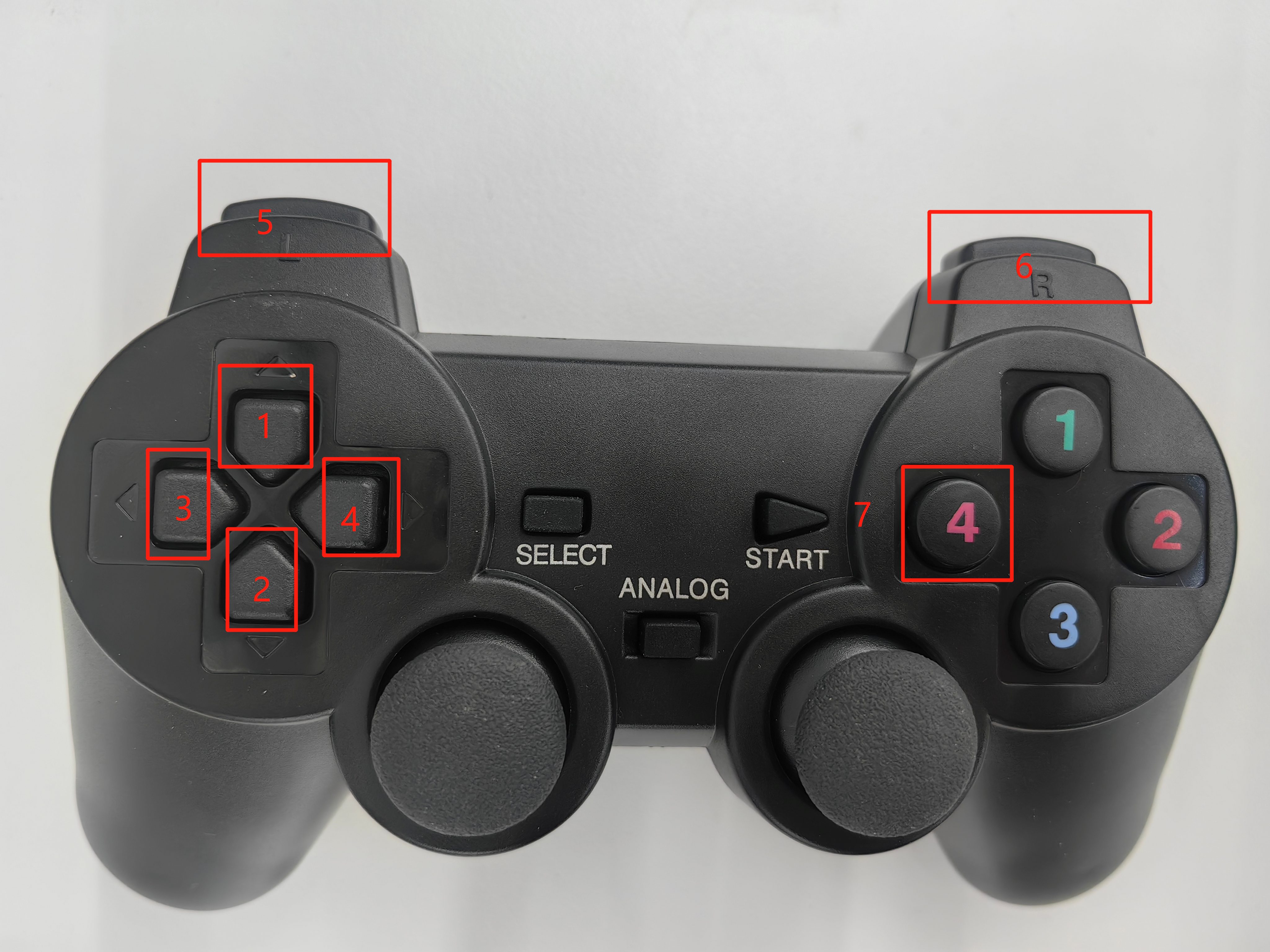
如果您成功到达这一步,您就可以用操纵杆控制汽车的运动了。如图所示,操纵杆上有 7 个按钮可以控制汽车的运动:按钮 1~4 控制小车的前进、后退、左转和右转;按钮 5 控制逆时针旋转,按钮 6 控制顺时针旋转,按钮 7 是停止按钮。

- 2 型操纵杆
将蓝牙操纵杆的 USB 接收器插入汽车。打开一个新的终端控制台,在命令行中输入以下命令:
roslaunch myagv_ps2 myagv_ps2_number.launch
如果出现错误,表明缺少 "myagv_ps2_number.launch "文件,请访问 Github 下载最新的 ROS 软件包并重新安装使用。
如果您成功到达这一步,您就可以用操纵杆控制汽车的运动了。如图所示,操纵杆上有 7 个按钮可以控制汽车的运动:按钮 1~4 控制小车的前进、后退、左转和右转;按钮 5 控制逆时针旋转,按钮 6 控制顺时针旋转,按钮 7 是停止按钮。