软件问题
mystudio相关
Q:关于mystudio下载固件的细节
- 一般情况下,出厂已经内置固件,除非在机器异常情况,否则无需重新刷固件
- 下载固件的过程中需要连接网络
- 选择对应机型的固件,不要选错其他机型
python相关
Q:运行提示缺少库文件Q:遇到报错信息:ModuleNotFoundError: No module named “pymycobot”,如何处理?
- A: 报错原因可能是pymycobot异常,对应的解决方法是重新安装pymycobot,指令是
pip3 install pymycobot --upgrade --user
Q:AGV用距离或角度控制的API有无?
- A:目前AGV API 中的距离控制是由时间和速度计算组合决定的。目前还没有专门用于指定移动距离或车轮角度的 API。如果您需要行驶特定的距离,可以计算距离转换所需的时间和速度。
Q:AGV JN运行启动激光雷达文件时缺少scripts文件夹该怎么解决?
- A:由于AGV JN镜像版本比较老,目前无法通过重新烧录镜像的方法解决这个问题 需要在GitHub文件当中下载缺少的源文件,导入进AGV即可 具体链接如下: https://github.com/elephantrobotics/myagv_ros/tree/myagv_ros_2023JN/myagv_odometry
ROS相关
Q:启动不了雷达里程计如何处理或建图有异常如何?
- A:输入下面两个指令使能雷达
//跳转到激光雷达启动目录
cd myagv_ros/src/myagv_odometry/scripts
//上电使能雷达,上电后雷达就会通过串口发送数据
./start_ydlidar.sh
如果在系统内置的myagv_ros包中没有start_ydlidar.sh此文件,请重新下载myagv_ros包,指令是:git clone https://github.com/elephantrobotics/myagv_ros/tree/myagv_ros_2023Pi 或者选择对应的分支之后,点击“Code”然后点击下载“Download ZIP”将ros包下载到本地之后再使用U盘将ros包放在AGV的系统中。
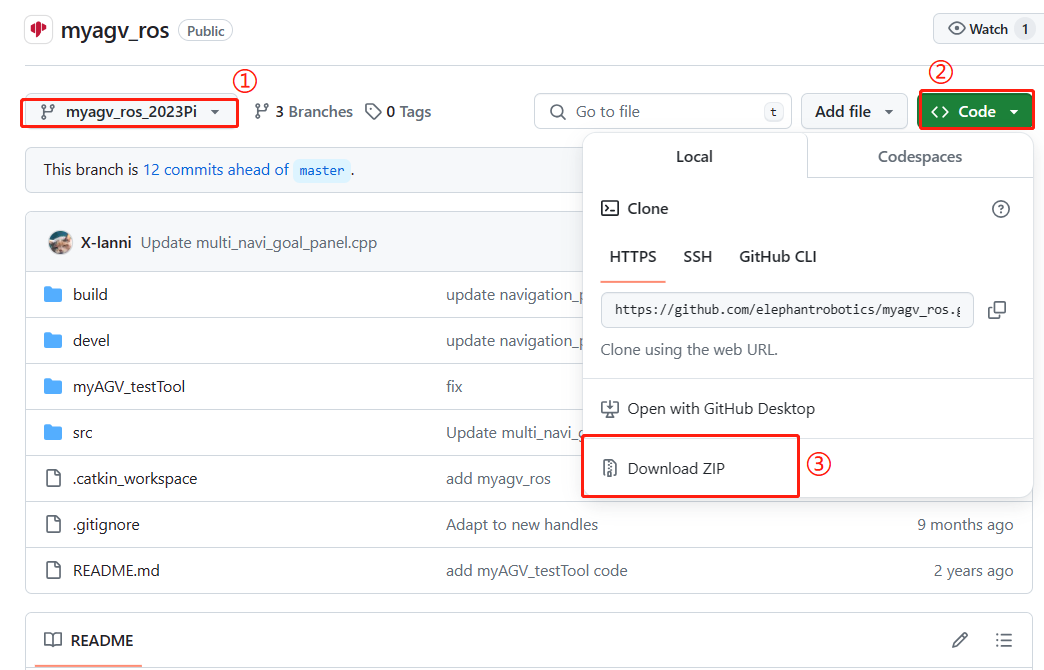
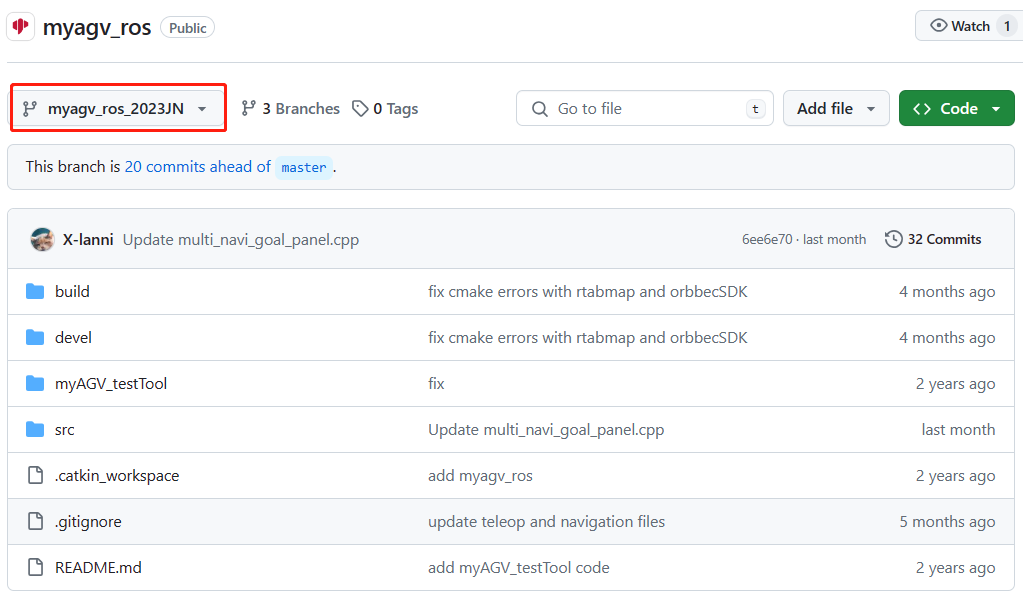
如果机型是AGV-JN请切换至AGV-JN分支
注意事项:
- 更换后需要将原来home/er目录下的myagv_ros文件夹删除,将新下载的ROS源码包解压后放在home/er目录下并更改名字为myagv_ros,即完全替换myagv_ros源码
- 完成myagv_ros的替换后,需要编译一下,对应的操作是在myagv_ros目录下输入指令:catkin_make进行编译,等编译显示进度100%后,可正常启动雷达建图功能
Q:为什么在AGV导航的时会出现转圈的行为,这个行为正常吗?
AGV的转圈的行为是目前存在且正常的,转圈行为主要有两个主要原因: 1.小车的里程计精度不足,中途发送误差就得需要转圈,计算误差,修正定位 2.小车导航目标点容忍值太低了,虽然地图上到达目标点了,但是小车认为自己离目的点差一点点距离,就会在目标点附近一直转圈。出厂已经设置好合适的容忍值,但是用户可以尝试修改容忍值看看,修改的文件参数方法参考下图,可按0.05的增量依次增加下图圈注的2个参数
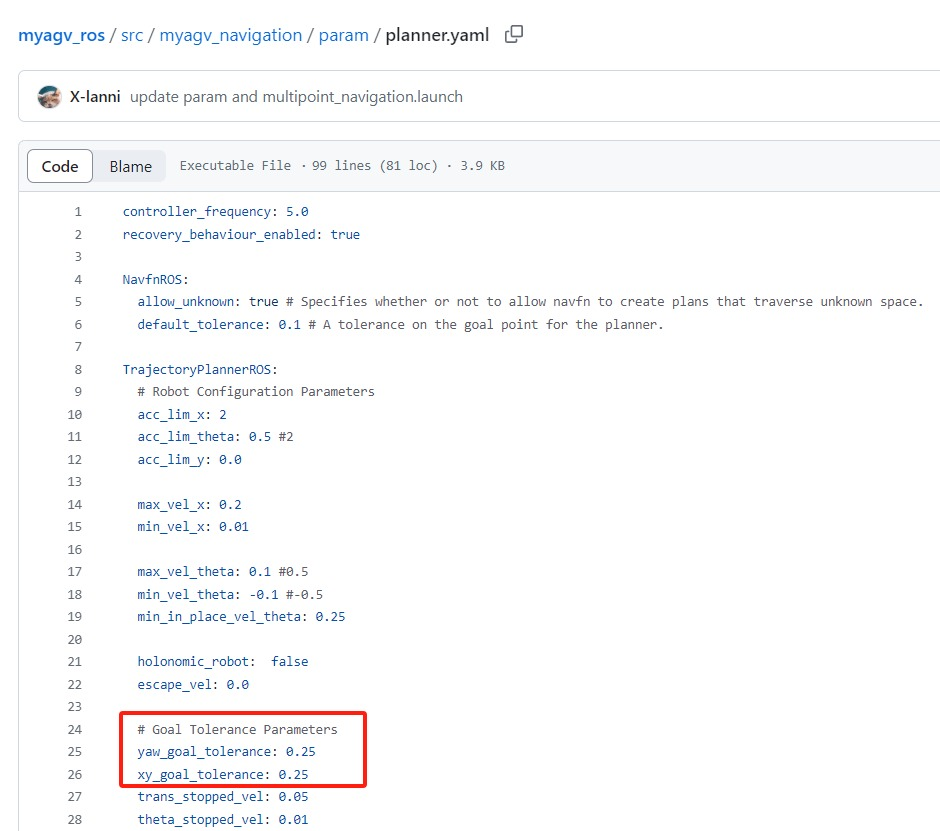
目前对于这种出现转圈的行为目前没有比较好的解决方案,当AGV转圈无法继续继续前往下一个定位点的时候,请尝试手动推一下AGV,改变AGV的位置,让AGV能更接近导航点。
Q: 树莓派版及jetson nano机器使用ROS过程不太流畅,有时候很卡,有没有优化方法?
树莓派及jetson nano虽然是一款功能强大的小型计算机,但是由于其硬件配置较为有限,因此在运行一些需要大量计算资源的任务时,出现卡顿的现象是正常的。比如在运行ROS开发时,如果涉及到图像识别等需要大量计算资源的任务,性能可能无法满足要求,导致卡顿现象的出现。 这个问题很大程度上是由于硬件性能不足,算力不够导致的,需要自己针对具体情况进行优化和改进,建议尝试使用以下方法去优化: ①优化代码:通过对代码进行优化,减少不必要的计算,提高代码的执行效率,从而减少树莓派及jetson nano的负担。 ②升级硬件:可以考虑使用更高性能的树莓派型号,或者使用其他性能更好,算力更高的硬件平台,如NVIDIA NX系列主板等。 ③分布式计算:可以将任务分散到多个设备上进行处理,从而减轻单个设备的负担,提高整个系统的性能。
Q: AGV使用雷达多点导航有偏差问题如何处理?
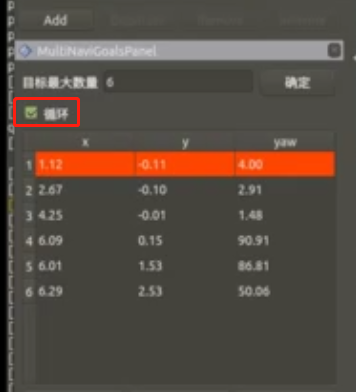
导致多点导航有偏差的原因有以下2个: ①AGV里程计精度不够。在累计跑了多个点之后偏移量已累加,一部分可通过AMCL给进行修正,但无法全部修正,目前问题是存在的,暂时无法解决,需要等待里程计算法优化或者硬件的升级。 ②导航操作不当,如何设置了循环导航模式,在设置了多个点,跑完最后一个点后,小车会跑第一个点位,完成一次循环。但是由于轮子里程计误差,返程时没办法规划路径,小车可能会出现从最后一个点直接跑第二点,无法到达第一个点的情况。所以建议,如果在使用循环的情况下多增加多几个点位完成这个循环,如下图所示,尽量形成一个闭环。
Q:关于AGV建图算法输入源是什么,cartographer是否支持
A:cartographer建图算法还在开发中,暂时没有确切的上线时间。
Q:雷达建图算法的输入是什么?
A:gmapping建图算法,需要激光雷达作为输入。 rtabmap建图算法,需要激光雷达和3d相机作为输入。
Q:如何利用小车普通的摄像头作为输入的算法
A:目前没有使用2d摄像头作为输入的案例,建议查看ORB-SLAM用法,需要用户自己研究,目前myagv在视觉slam上做的开发是基于3d相机,目前myagv前面的相机仅用来识别aruco码。
Q: 能否调整建图算法里,小车的前进速度?
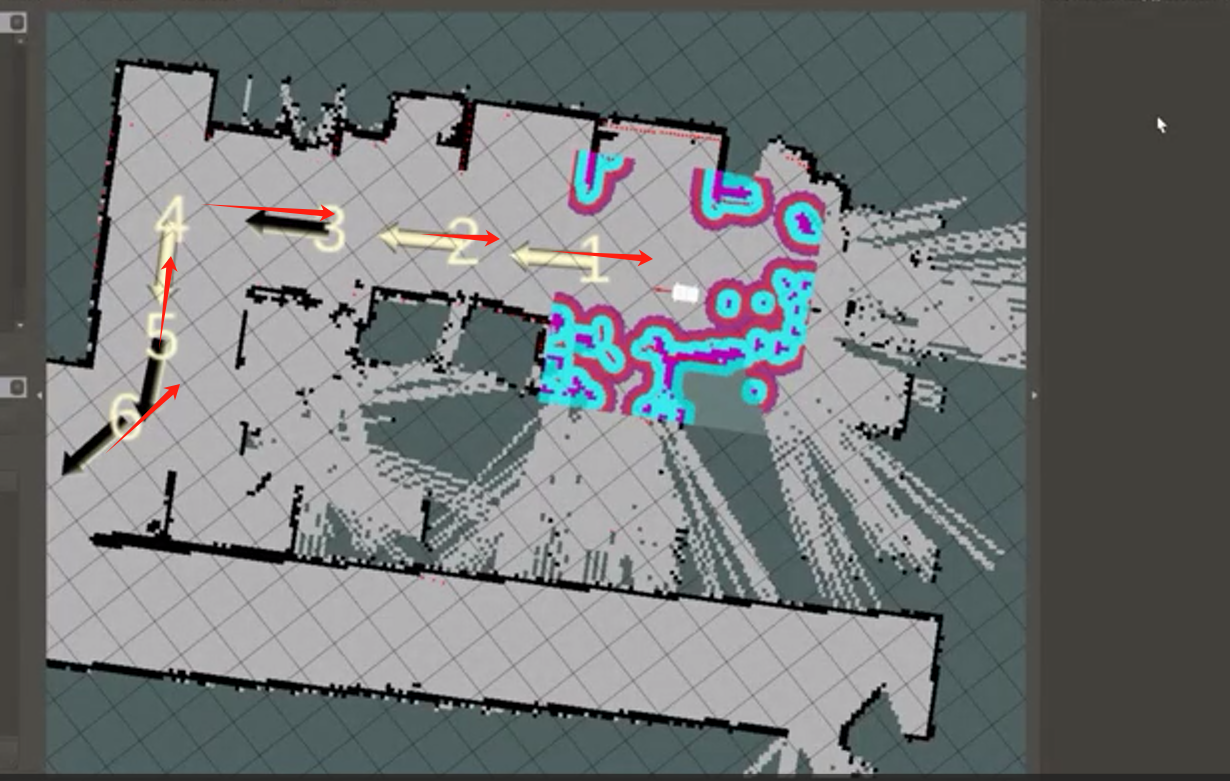
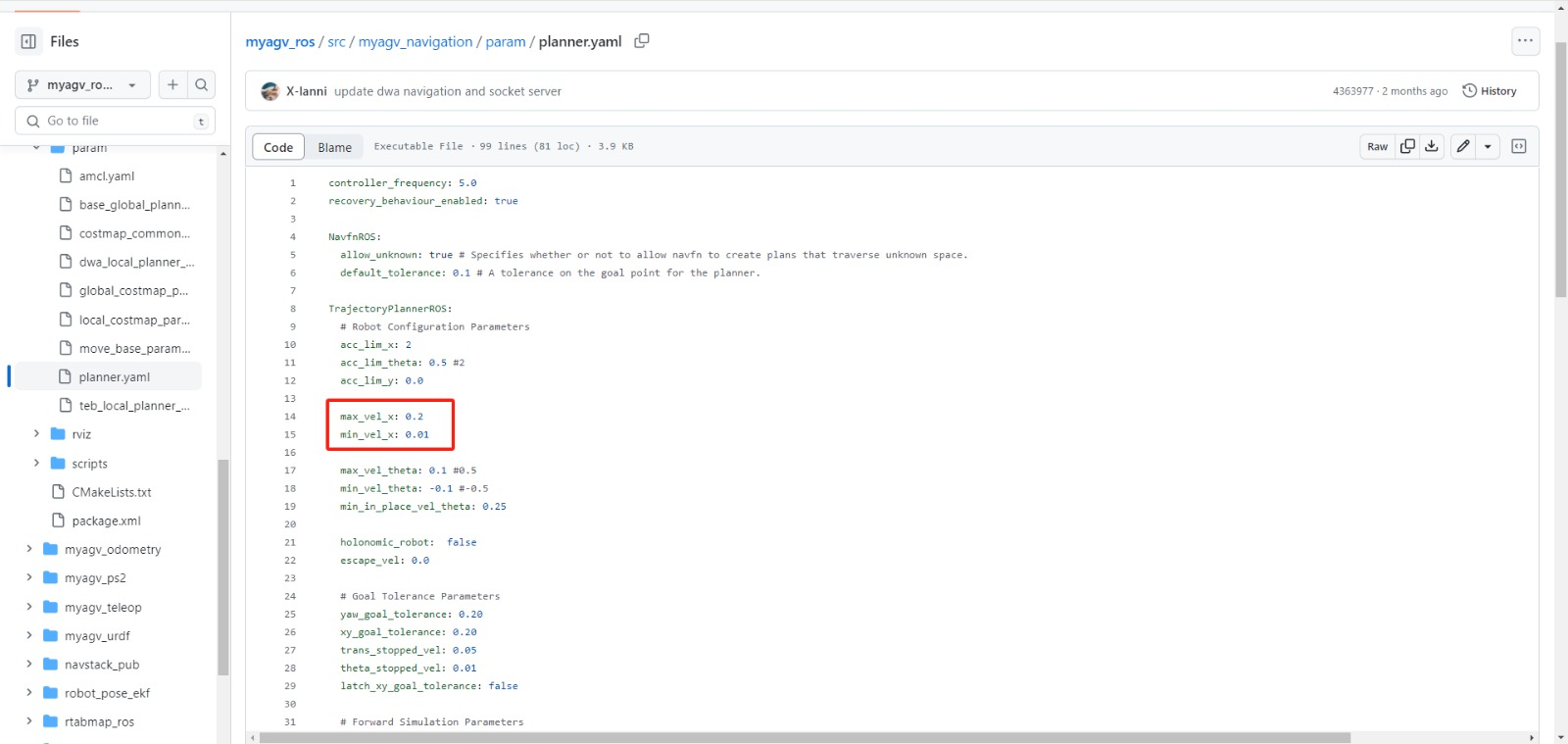
A:导航时的速度可以调整,但是不太推荐去调,因为速度的参数不确定是否会影响到导航整体的效果 下图中圈注是导航时最大、最小前进速度,要快点的话,就把0.2改大一点点
Q:为什么在雷达多点导航的时候,会出现跳过中间设置的一些点位的情况? A:有两方面的原因及优化的方法 ①建立的地图匹配度不高,建议在建图时让AGV多跑几圈,让雷达充分扫描使建图准确 ②在多点导航的时候,前后两点导航距离过长,定位偏差相对较大,路径规划难度增加,导致导航失败了就会跳过对应点位,导航到下一个点,所以建议在起始点和目标点之前多增加几个导航点位。