深度相机
兼容型号: myAGV Jetson Nano 2023
Astra Pro 2 深度相机目前只在myAGV JN版本上使用。而且Astra Pro 2 深度相机是选配产品,需要额外购买。

Astra Pro 2 深度相机是基于 3D 结构光成像技术获取物体的深度图像,同时利用彩色相机采集物体的彩色图像,Astra Pro 2 适用于 0.6m-6m 距离进行 3D 物品和空间扫描的智能产品,可实现测量距离内的物体深度数据测量。
Astra Pro 2基本参数
| 参数 | 规格 |
|---|---|
| 名称 | Astra Pro 2 |
| 型号 | A20113-000 |
| 工作距离 | 0.6m - 6m |
| 尺寸 | 164.85× 36.00 × 40 mm |
| 重量 | 145g±5 |
| 功耗 | 平均功耗<2.0W,峰值功耗<2.5W |
| 基线 | 55mm |
| 接口 | USB Type A 公头 |
| 供电方式 | USB 2.0 |
| 供电建议 | 5V 0.5A |
| 工作温度 | 10°C-40°C |
| 测量精度 | 3mm@1m |
Astra Pro 2深度图像参数
| 参数 | 规格 | 备注 |
|---|---|---|
| 分辨率<br/>@帧率 | 1280x1024@7fps 1280x960@7fps 640x480@10/15/30fps 320x240@10/15/30fps 160x120@10/15/30fps |
|
| 深度 FOV | H58.4° V45.5° D70°±5° | 1m 处测量 |
| 深度格式 | Y16/Y12/Y11 | 深度单位 0.1mm、1mm |
Astra Pro 2彩色图像参数
| 参数 | 规格 |
|---|---|
| 分辨率<br/>@帧率 | 1280x960@7fps 640x480@10/15/30fps 320x240@10/15/30fps |
| 彩色 FOV | H62.7° V49° D75.1°±5° |
| 图像格式 | UYVY |
Astra Pro 2参数
| 参数 | 规格 |
|---|---|
| 操作系统 | Windows/ Linux |
| 适用场景 | 室内 |
| 安全性 | Class1 激光 |
| 相机原理 | 单目结构光 |
| 认证 | RoHS 2.0/REACH/Class 1 |
安装教程
1.取出Astra Pro 2 深度相机和安装零部件。



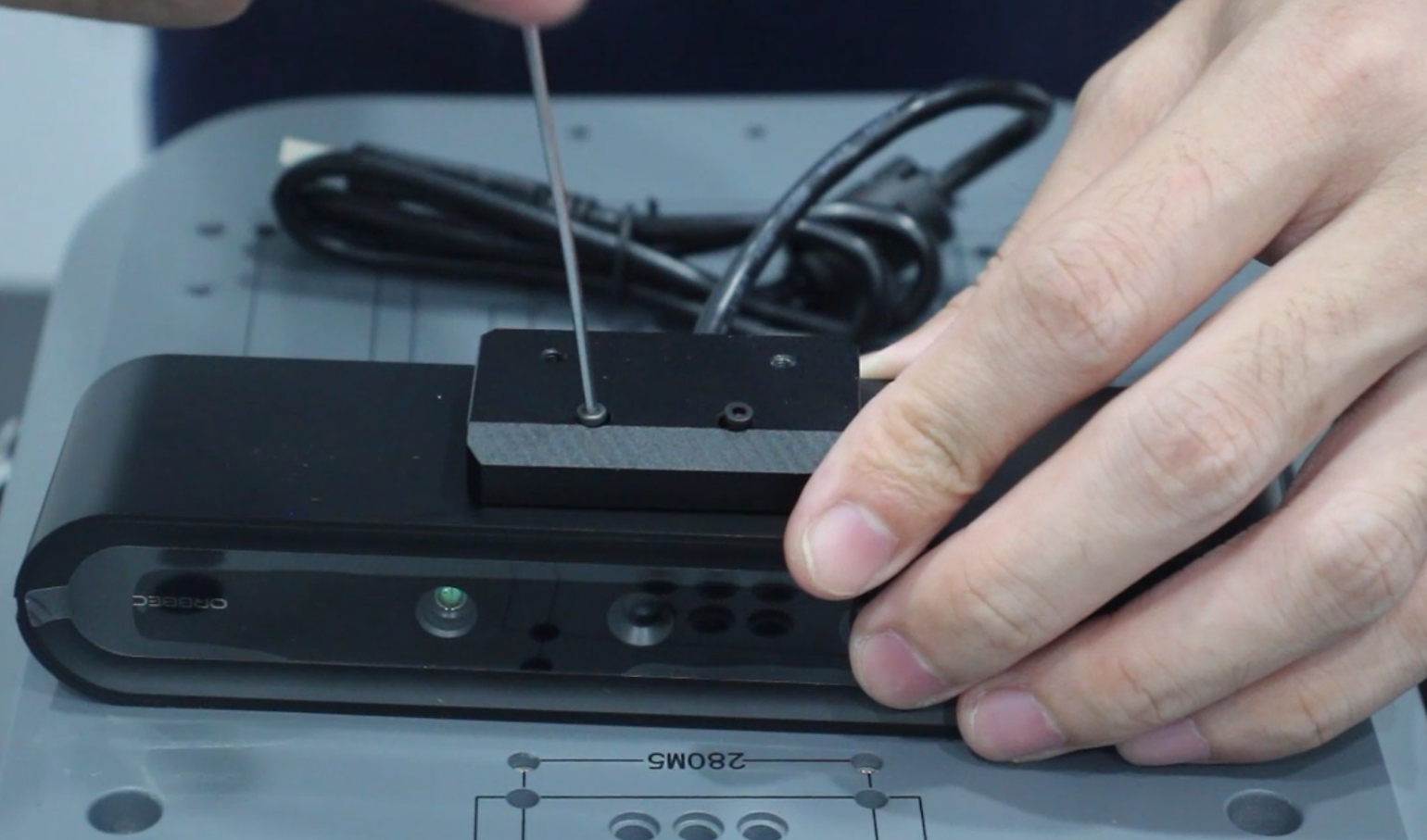
2.取出2个M2*4螺丝,将连接件和深度相机进行固定。


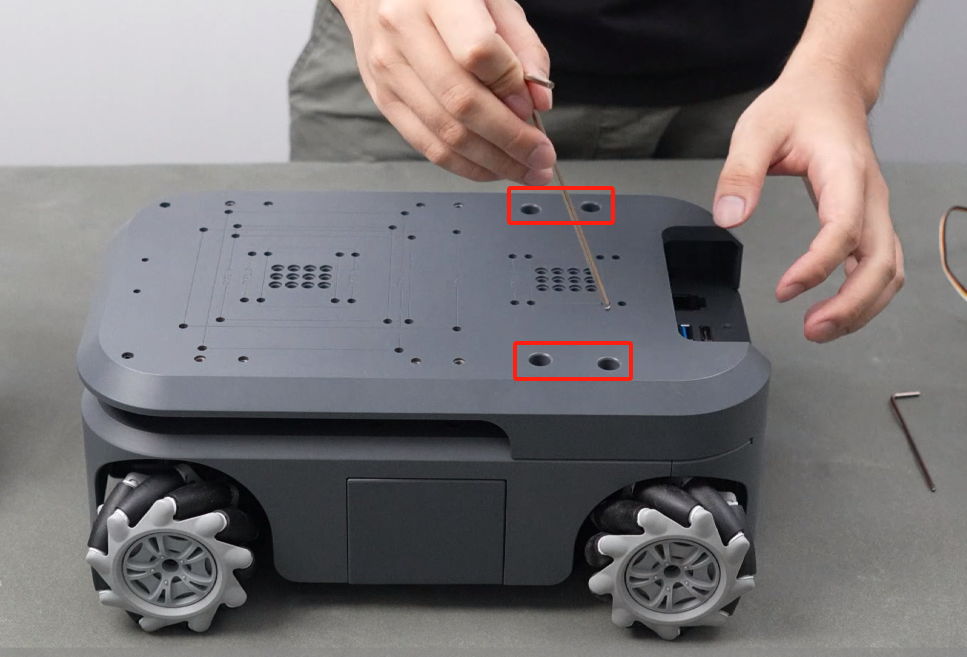
3.使用内六角扳手将4颗M4*8螺丝拆卸下来。
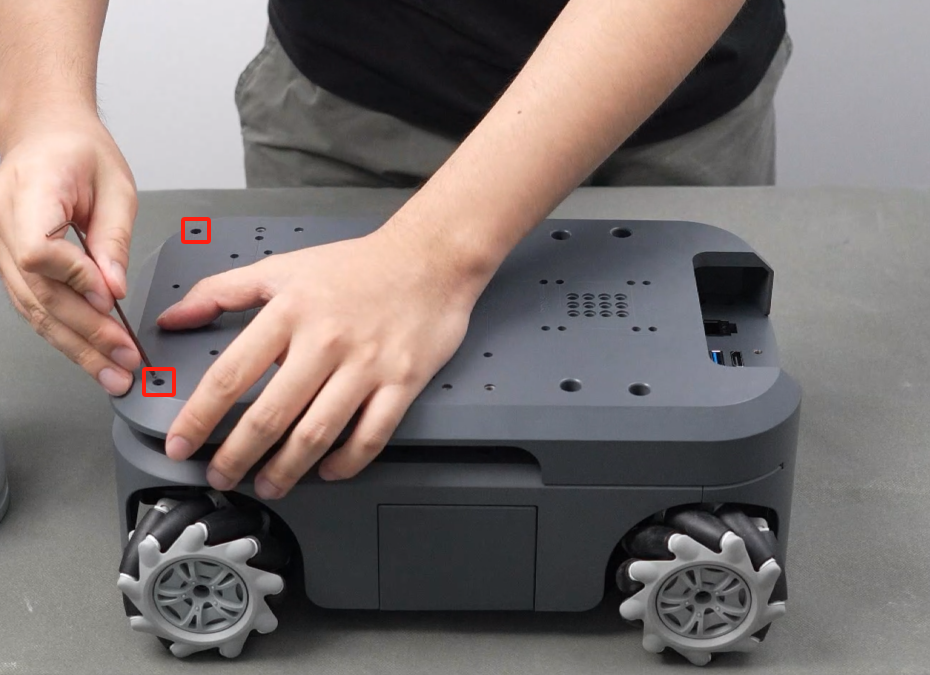
4.使用内六角扳手将2颗M2.5*2螺丝拆卸下来
5.将外壳翻转,使相机的螺丝孔对齐。


6.拧上M4*4螺丝进行安装。

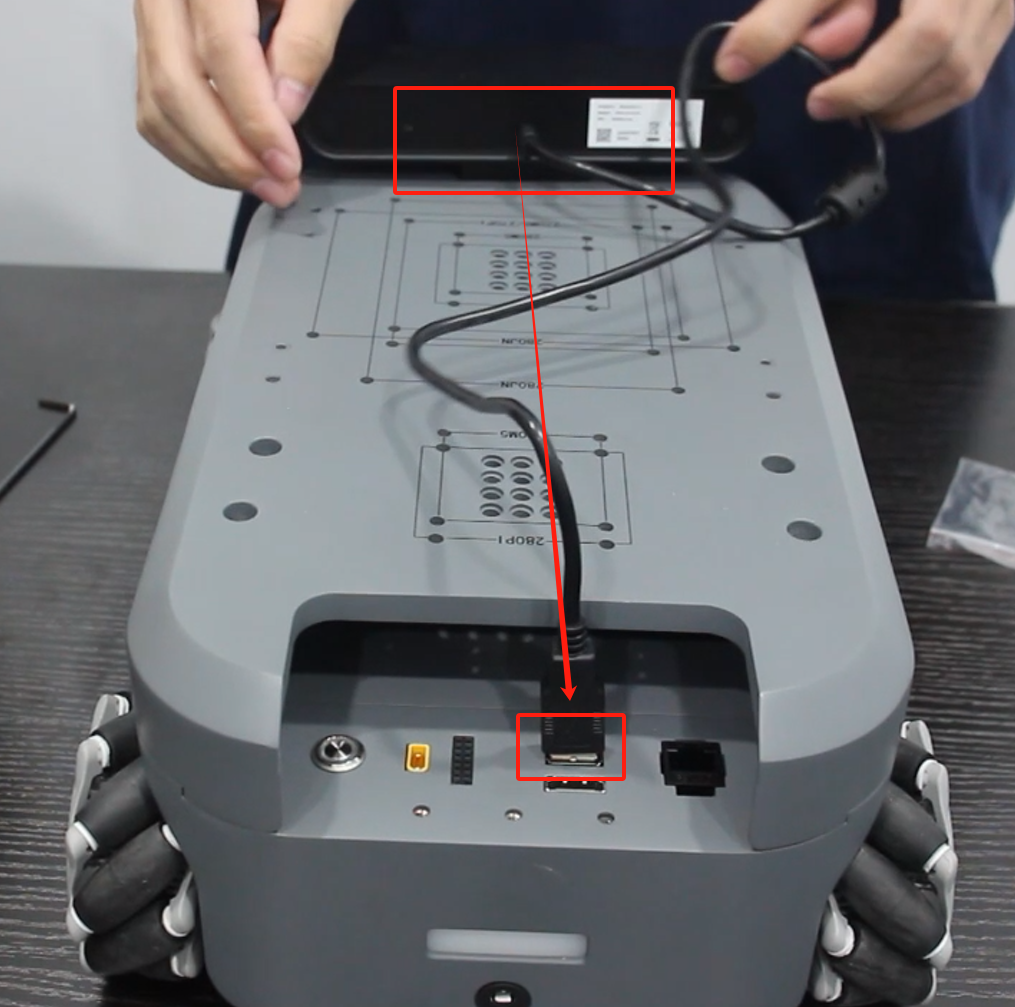
7.相机usb线接到myAGV的usb接口
使用教程
Astra Pro 2 深度相机目前主要以ros开发
roslaunch orbbec_camera astra_pro2.launch
用户可以调用的ros话题
/camera/color/camera_info: The color camera info./camera/color/image_raw: The color stream image./camera/depth/camera_info: The depth camera info./camera/depth/image_raw: The depth stream image./camera/depth/points: The point cloud, only available whenenable_point_cloudistrue./camera/depth_registered/points: The colored point cloud, only available whenenable_colored_point_cloudistrue./camera/left_ir/camera_info: The left IR camera info./camera/left_ir/image_raw: The left IR stream image./camera/right_ir/camera_info: The right IR camera info./camera/right_ir/image_raw: The right IR stream image./diagnostics: The diagnostic information of the camera, Currently, the diagnostic information only includes the temperature of the camera.
其他详情可以参考myAGV-rtabmap建图