myAGV-rtabmap建图
1.打开slam激光扫描launch文件
先检测激光雷达是否上电使能,没有开启则需要终端通过脚本文件上电启动激光雷达,如果雷达上电使能,则可以跳过上电使能雷达步骤。
//跳转到激光雷达启动目录
cd myagv_ros/src/myagv_odometry/scripts
//上电使能雷达,上电后雷达就会通过串口发送数据
./start_ydlidar.sh
上电使能雷达后,打开3个控制台终端(快捷键Ctrl+Alt+T),分别在命令行中输入以下指令:
//启动里程计和激光雷达
roslaunch myagv_odometry myagv_active.launch
//启动深度相机对应的launch文件
roslaunch orbbec_camera astra_pro2.launch
//启动rtabamp建图算法
roslaunch myagv_navigation rtabmap_mapping.launch
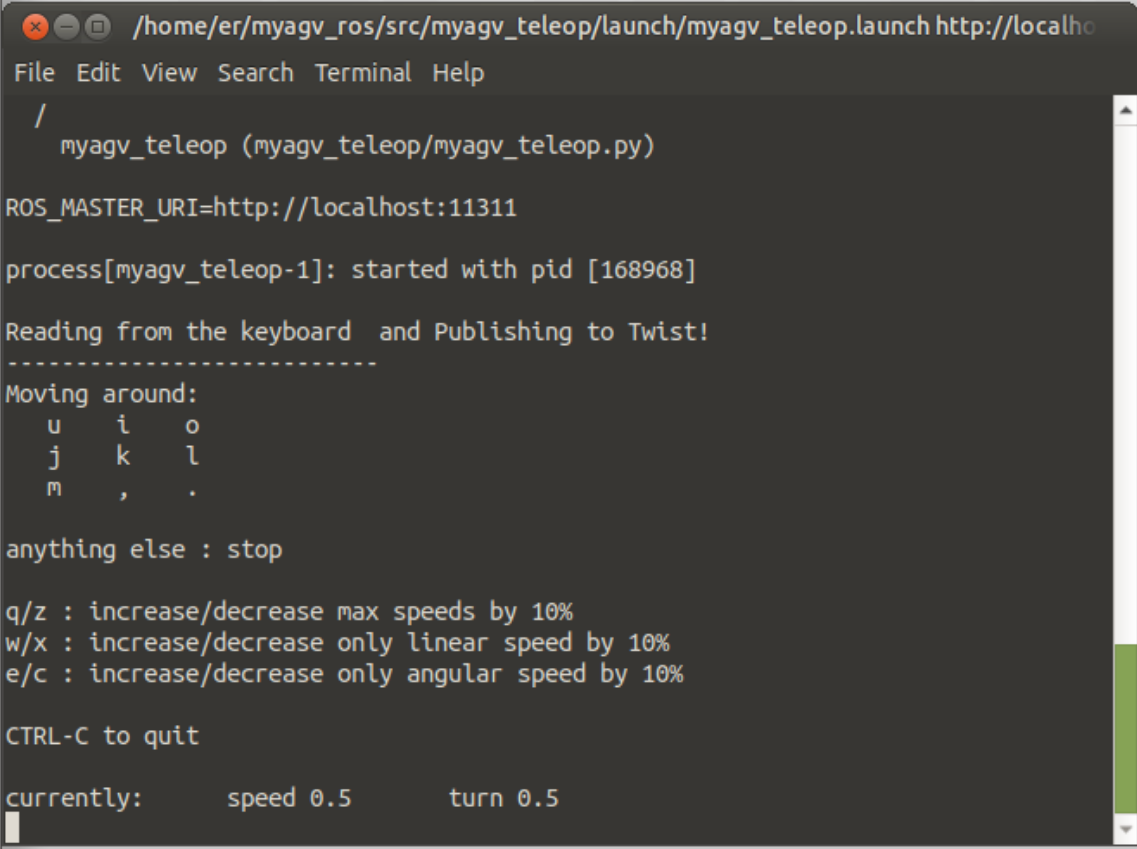
2.打开键盘控制文件
重新打开一个控制台终端,在终端命令行中输入:
cd myagv_ros
roslaunch myagv_teleop myagv_teleop.launch
| 按键 | 方向 |
|---|---|
| i | 前进 |
| , | 后退 |
| j | 向左运动 |
| l | 向右运动 |
| u | 逆时针旋转 |
| o | 顺时针旋转 |
| k | 停止 |
| m | 顺时针后退 |
| . | 逆时针后退 |
| q | 增加线速度和角速度 |
| z | 减小线速度和角速度 |
| w | 只增加线速度 |
| x | 只减小线速度 |
| e | 只增加角速度 |
| c | 只减小角速度 |
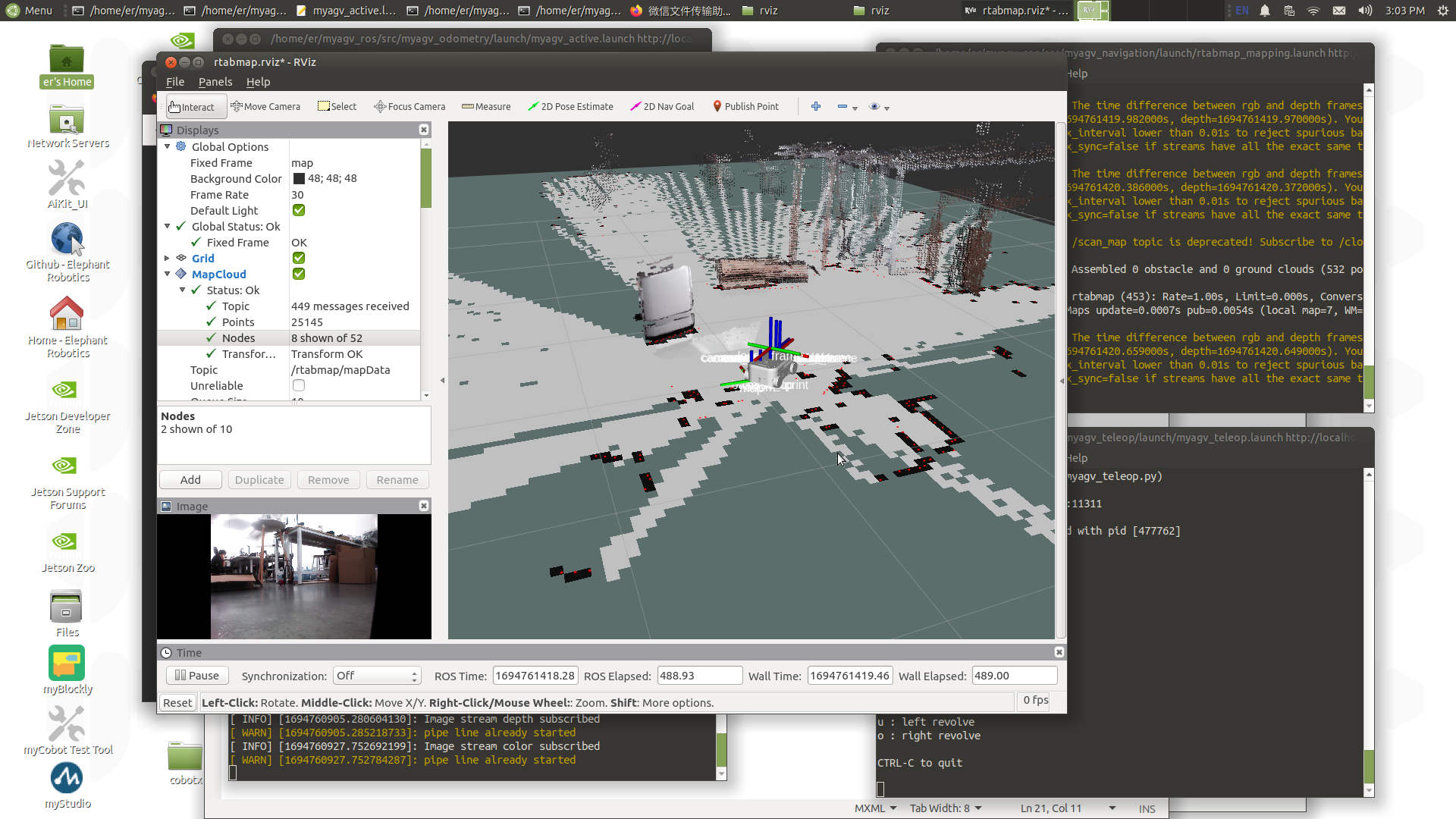
现在小车可以在键盘的控制下开始移动了,操控小车在所需建图的空间内转一圈吧。与此同时,可以看到在Rviz空间里我们的地图也会跟着小车的移动一点点的把地图构建出来了。 注意:在用键盘操作小车的时候,确保运行myagv_teleop.launch文件的终端是当前选中的窗口,否则键盘控制程序无法识别键盘的按键。而且速度越慢,建图效果越好,建议线速度设置0.2,角速度设置0.4进行键盘控制 键盘控制小车移动建完图后,使用ctrl+c停止建图节点,就会~/.ros/rtabmap.db生成地图数据。
3.导航使用
除了键盘控制外,还可以进行同时建图和导航,同样在上电使能雷达后,myagv打开3个控制台终端(快捷键Ctrl+Alt+T),分别在命令行中输入以下指令:
//启动里程计和激光雷达
roslaunch myagv_odometry myagv_active.launch
//启动深度相机对应的launch文件
roslaunch orbbec_camera astra_pro2.launch
//启动rtabamp建图算法
roslaunch myagv_navigation 3d_navigation_active.launch
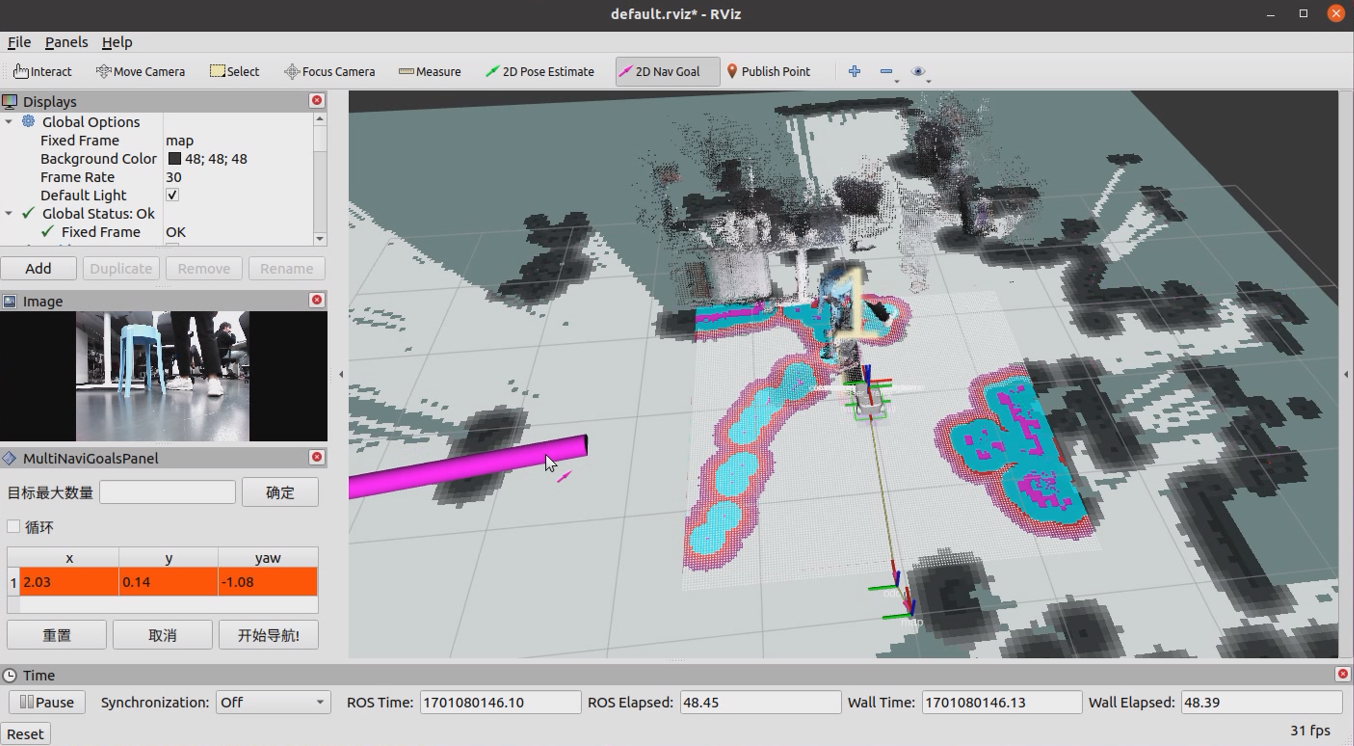
1.左下角导航操作区说明
① 可设置目标点的最大数量:要求所设置目标点个数不能大于该参数(可以小于)
② 是否循环:若勾选,导航至最后一个目标点后,将重新导航至第一个目标点。例:1->2->3->1->2->3->···,该选项必须在开始导航前勾选
③ 任务目标点列表: x/y/yaw,地图上给定目标点的位姿(xy坐标与航向角yaw)。
- 设置完目标最大数量,保存后,该列表会生成对应数量的条目
- 每给出一个目标点,此处会读取到目标点的坐标与朝向
④ 开始导航:开始任务
⑤ 取消:取消当前目标点导航任务,机器人停止运动。再次点击开始导航后,会从下一个任务点开始。
例:1->2->3,在1->2的过程中点击取消,机器人停止运动,点击开始导航后,机器人将从当前坐标点去往3。
⑥ 重置:将清空当前所有目标点
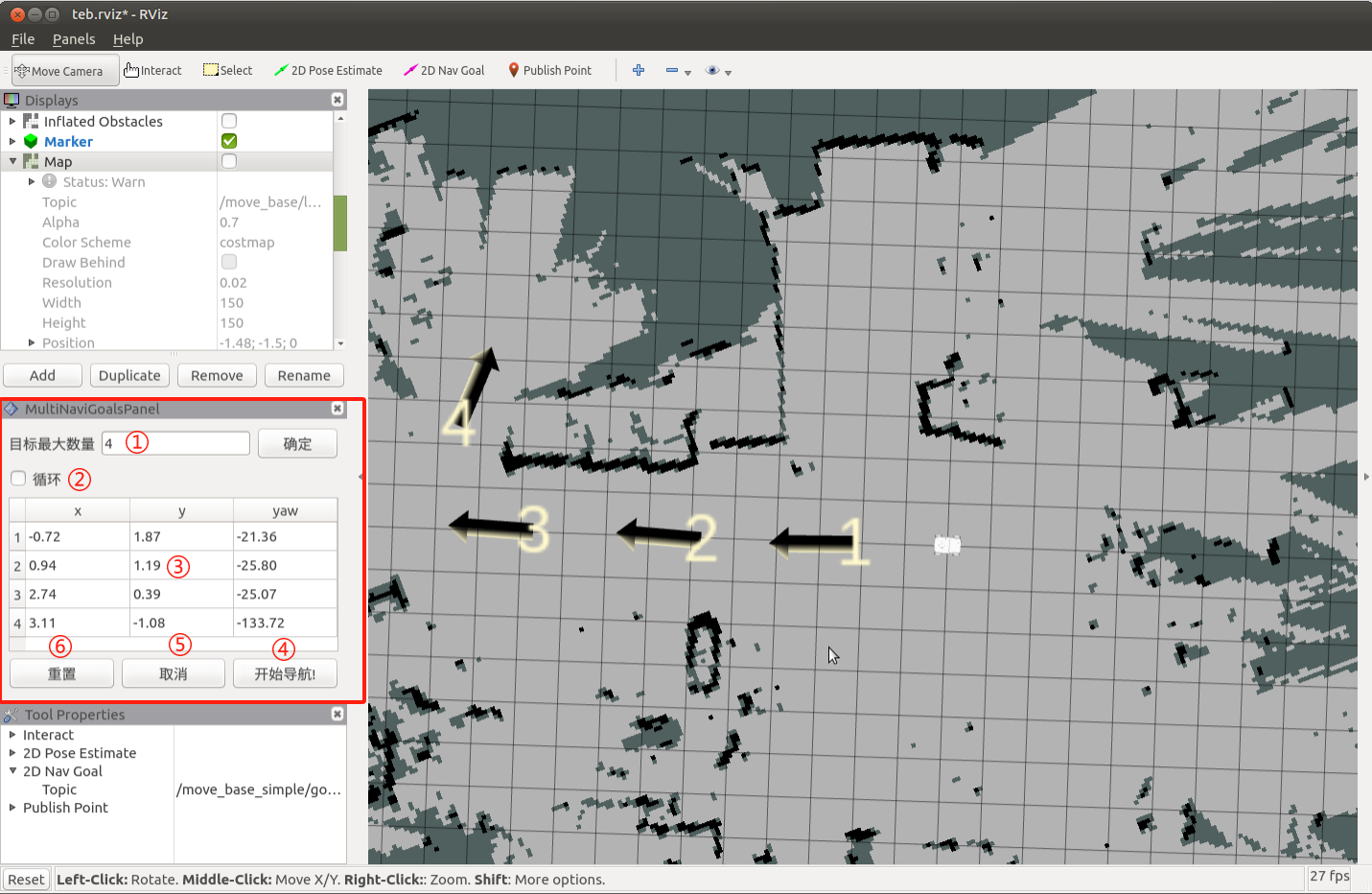
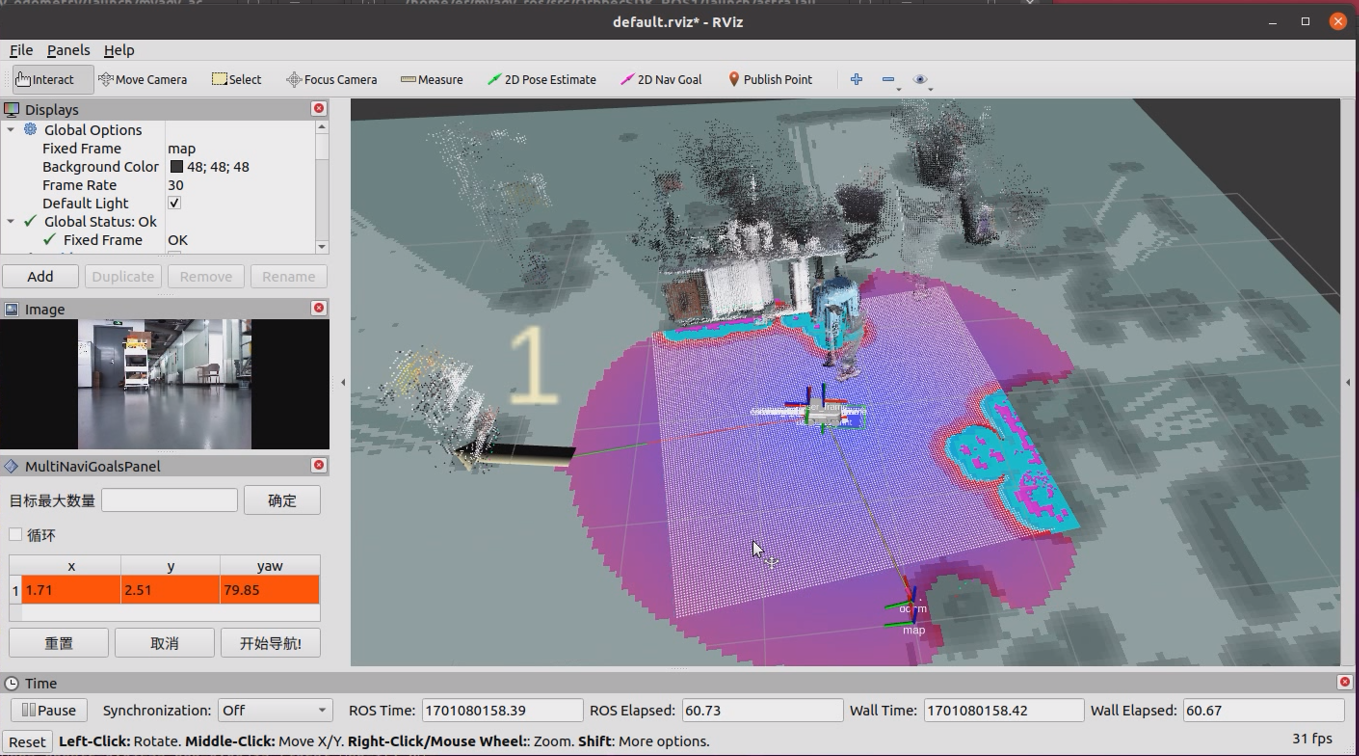
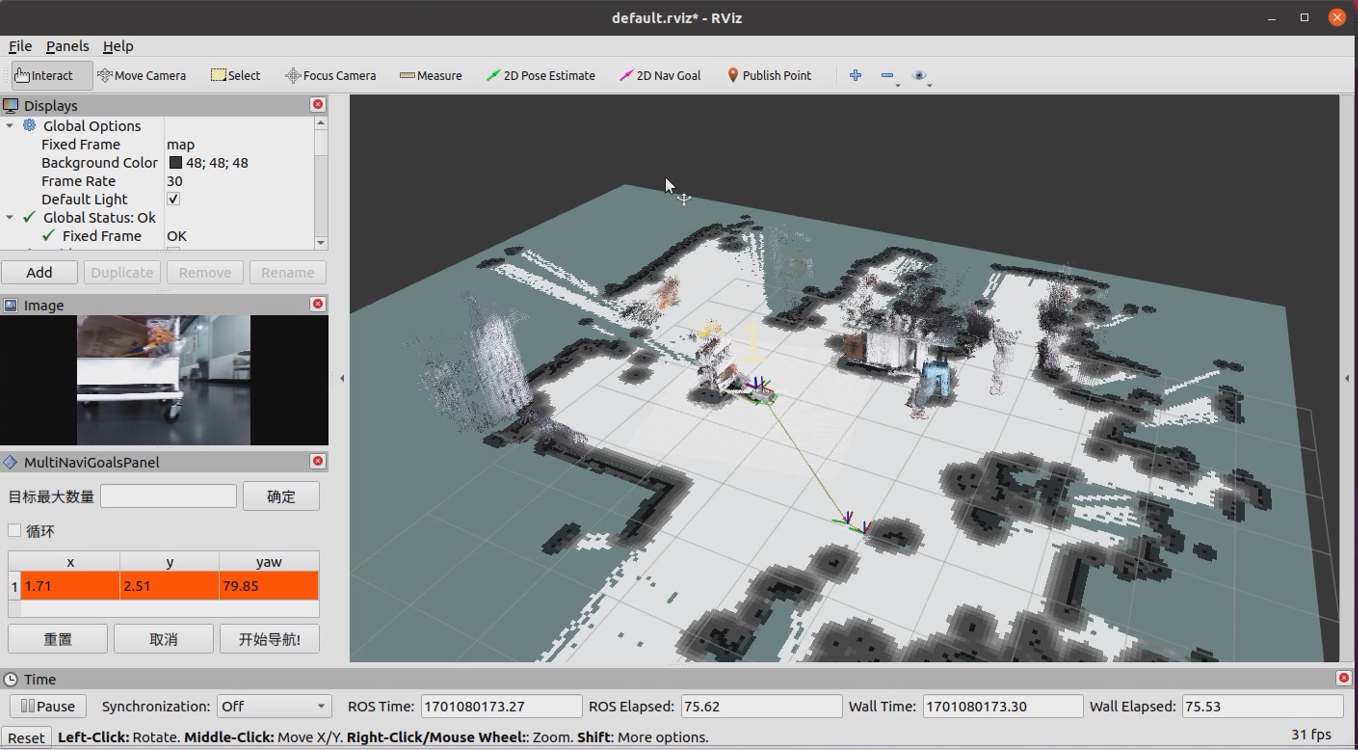
2.设置任务目标点个数,点击确认保存。然后点击ToolBar上的2D Nav Goal,在地图上给定目标点。(每次设置都需要先点击2D Nav Goal),目标点有朝向区分,箭头顶端为车头方向。点击开始导航,导航开始,在rviz中看到起点到目标点位间有一条小车的规划路径,小车会沿着路线运动到目标点位。
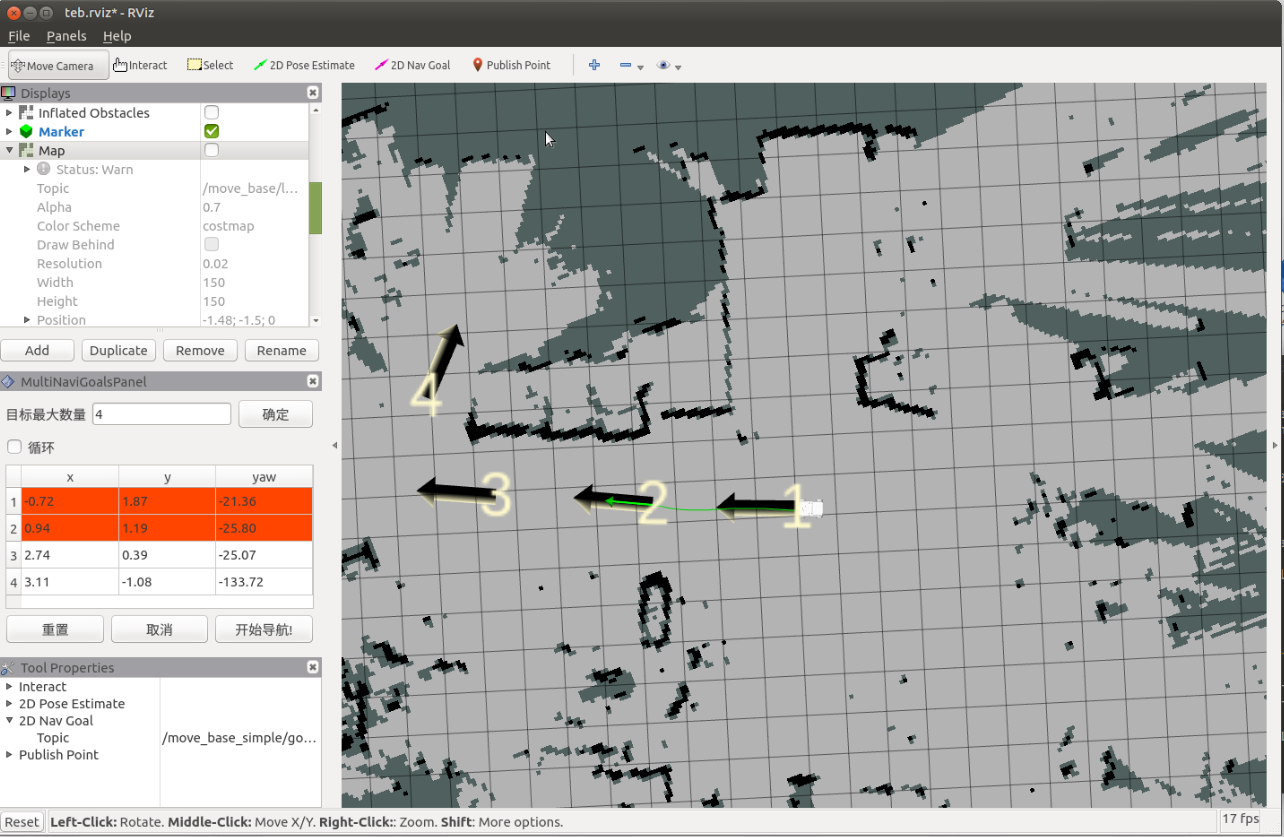
3.实际使用效果
效果如下:通过rviz发布导航点,同时导航与建图,到达导航点