使用常见的 ROS 工具
- 启动文件
ROS 中的启动文件是同时启动多个节点的一种手段。它还能自动启动 ROS 主节点管理器,并方便对每个节点进行各种配置,为多个节点的运行提供极大的便利。
(1)<launch> 标签
<launch> 标签就像一个大括号,定义了一个特定区域。所有启动文件都以 <launch> 开始,以 </launch> 结束。所有描述性标记必须写在 <launch> 和 </launch> 之间。
<launch>
……
……
</launch>
(2)<node> 标签
在启动文件中, <node> 标签是最常见的标签之一。每个<node>标签都包含 ROS 图中节点名称(name)、节点所在软件包(pkg)和节点类型(type)的属性。常用格式如下:
<node pkg="package-name" type="executable-name" name="node-name" />
| 标签属性 | 属性功能 |
|---|---|
| name="NODE_NAME" | 为节点指定名称,覆盖由 ros::init() 定义的 node_name 名称 |
| pkg="PACKAGE_NAME | 包含节点的软件包名称 |
| type="FILE_NAME" | 节点的可执行文件名 |
| output="screen" | 向终端屏幕输出节点的标准输出;默认为日志文件 |
| respawn="true" | 设置为 true 时,节点会在终止时自动重启;默认为 false |
| ns = "NAME_SPACE" | 命名空间,为节点内的相对名称添加命名空间前缀 |
| args="arguments" | 节点所需的输入参数 |
(3)<include> 标签
该标签允许在当前文件中加入另一个 roslaunch XML 文件。
| 标签属性 | 属性功能 |
|---|---|
| file ="$(find pkg-name)/path/filename.xml" | 指定要包含的文件 |
e.g.
<include file="$(find demo)/launch/demo.launch" />
(4)<remap> 标签
顾名思义,<remap> 标签用于重新映射。ROS 支持主题的重新映射,<remap> 标签包括original-name和new-name,分别代表原名和新名。
例如,假设您有一个订阅"/chatter"主题的节点,但您自己的节点只能发布到"/demo/chatter"主题。由于这两个主题的消息类型相同,而你又想让这些节点进行通信,你可以在启动文件中写入以下内容:
<remap from="chatter" to="demo/chatter"/>
这样就可以直接将 /chattertopic 重新映射到 /demo/chatter,从而实现两个节点之间的通信,而无需修改任何代码。
(5)<param> 标签
<param> 标签的功能与命令行中的 rosparam set 命令类似。例如,在参数服务器中添加一个值为 1.0 的名为 demo_param 的参数。
<param name="demo_param" type="int" value="1.0"/>
(6)<rosparam> 标签
<rosparam> 标签允许从 YAML 文件一次性导入大量参数。
用法如下:
<rosparam command="load" file="$(find pkg-name)/path/name.yaml"/>
(7)<arg> 标签
"Argument" 是另一个概念,类似于启动文件中的局部变量,仅限于在启动文件中使用,目的是方便重构启动文件,与 ROS 节点内的实现无关。
要设置参数,请使用
<arg name="arg-name" default= "arg-value"/>
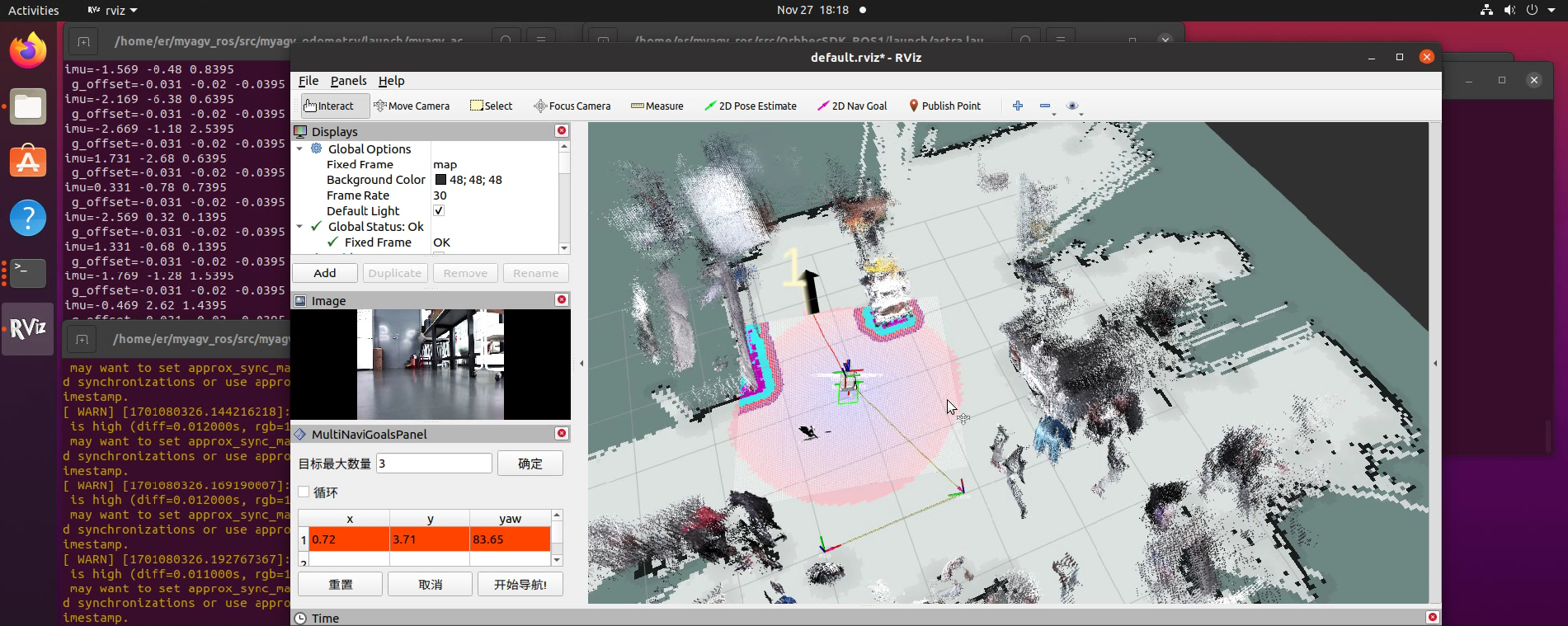
- Rviz
rviz 是一种三维可视化工具,能很好地兼容基于 ROS 软件框架的各种机器人平台。在 rviz 中,可以使用 XML 来描述机器人、周围物体和任何物理实体的属性,包括尺寸、质量、位置、材料、关节等,并将其直观地呈现在界面中。此外,rviz 还能以图形方式显示机器人传感器数据、机器人运动状态和周围环境变化等实时信息。总之,rviz 可以帮助开发人员实现所有可监控信息的图形化显示。开发人员还可以在 rviz 的控制界面中通过按钮、滑块、数字输入等方式控制机器人的行为。 下图显示了 rviz 在绘制地图过程中以图形方式显示的网格图、三维点云图和激光数据。
- Qt Toolbox
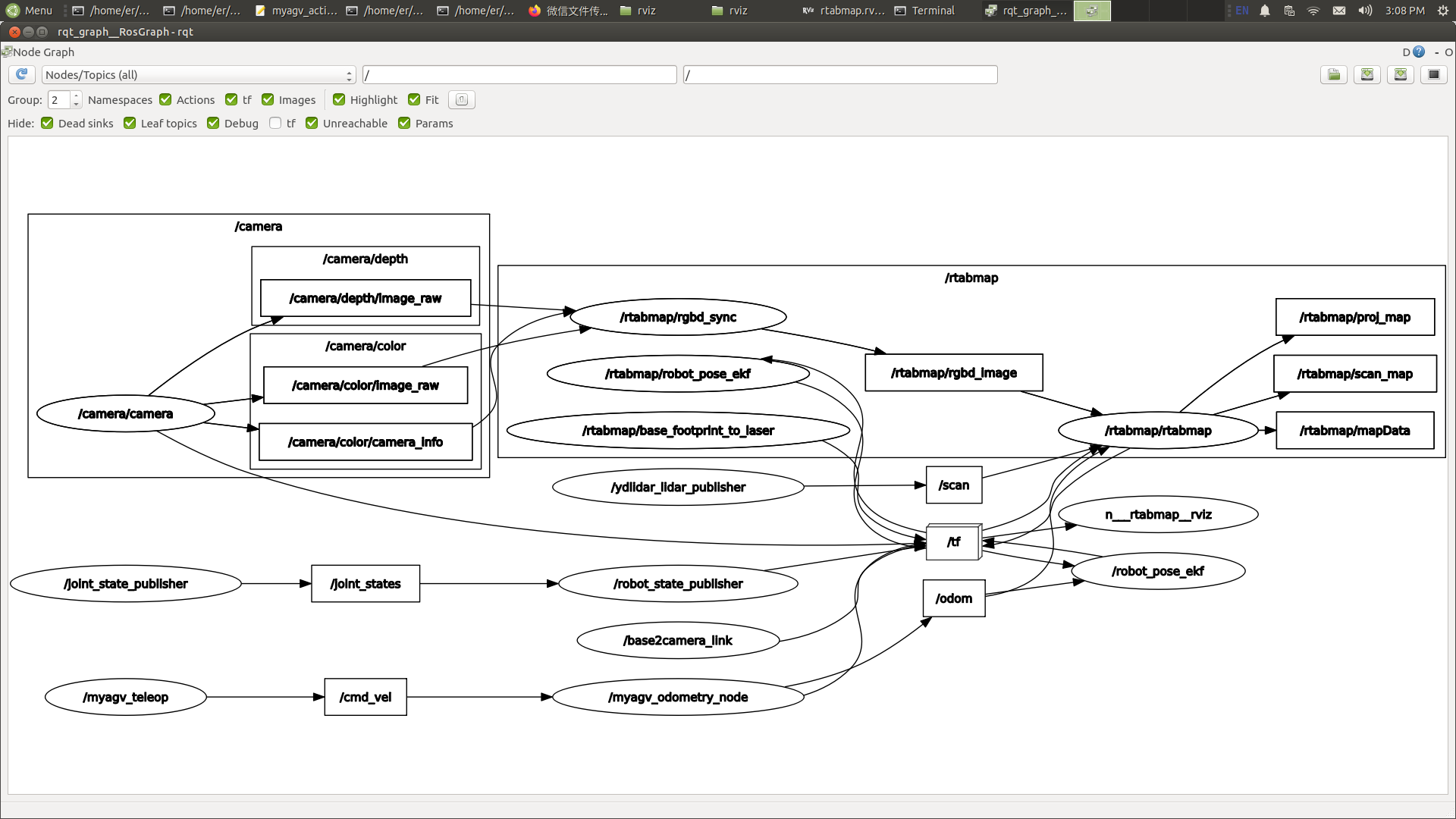
计算图可视化工具(rqt_graph):
rqt_graph 工具提供当前 ROS 系统中计算图的图形表示。要在运行图形构建功能时启动该工具,请使用以下命令:
rqt_graph
成功启动后,将显示计算图表,如下图所示。
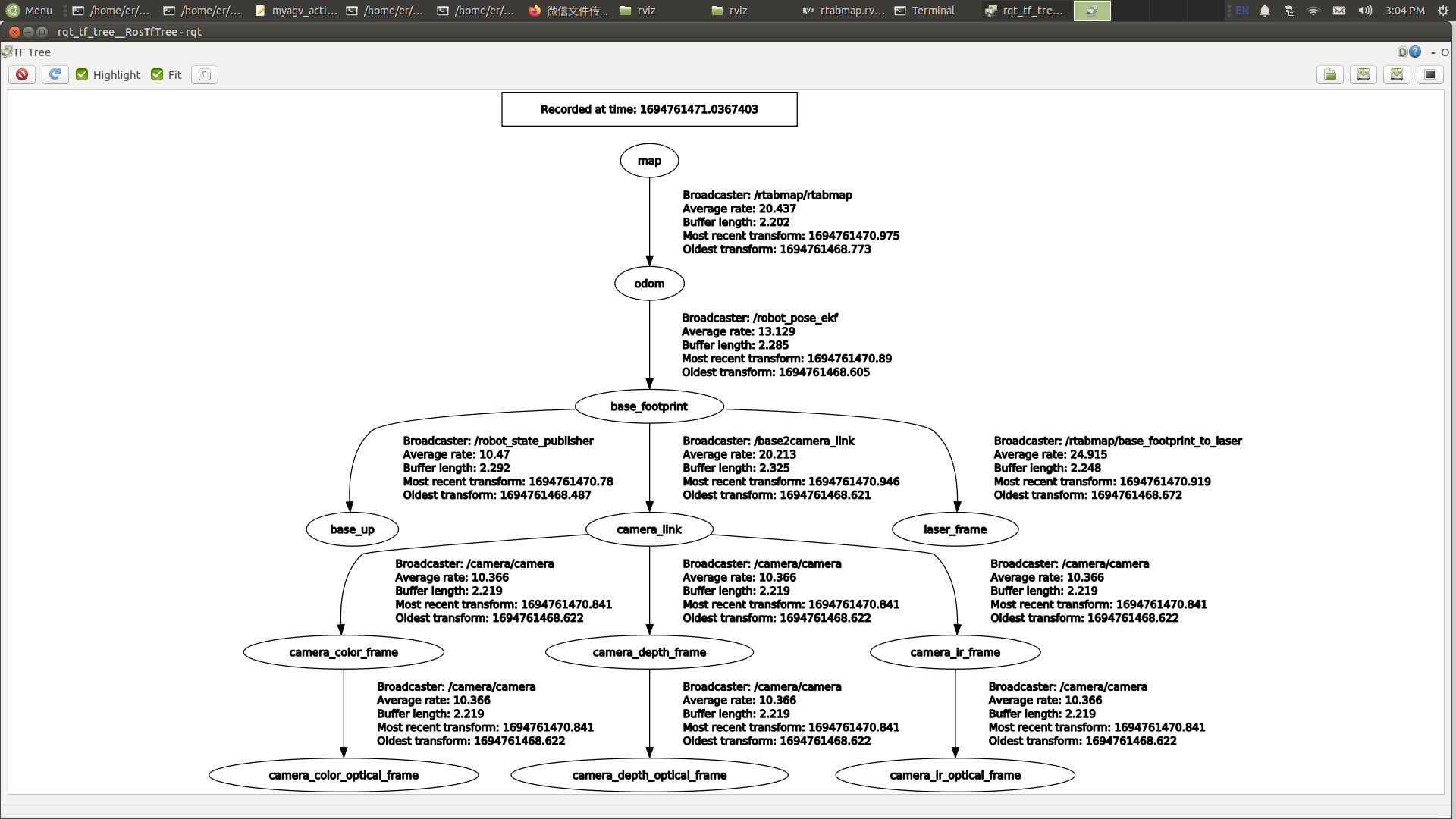
TF 关系可视化工具 (rqt_tf_tree)
rqt_tf_tree 工具以图形方式显示运行节点之间的当前 TF 关系。要在运行图形构建功能时启动该工具,请使用以下命令:
rosrun rqt_tf_tree rqt_tf_tree
成功启动后,将显示 TF 关系图,如下图所示。