Nav2
接下来将介绍和使用Nav2导航。
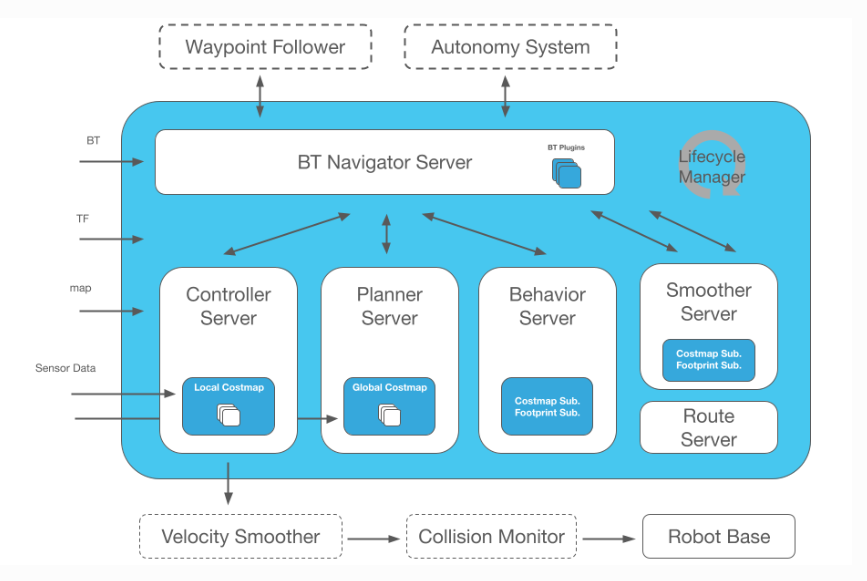
Nav2 是 ROS Navigation Stack 的继任者,部署了为移动和表面机器人技术提供动力的相同类型的技术。该项目允许移动机器人在复杂的环境中导航,以使用几乎任何类别的机器人运动学完成用户定义的应用任务。它不仅可以从 A 点移动到 B 点,还可以具有中间姿势,并表示其他类型的任务,例如对象跟踪、完整覆盖导航等。
启动myAGV底层通信
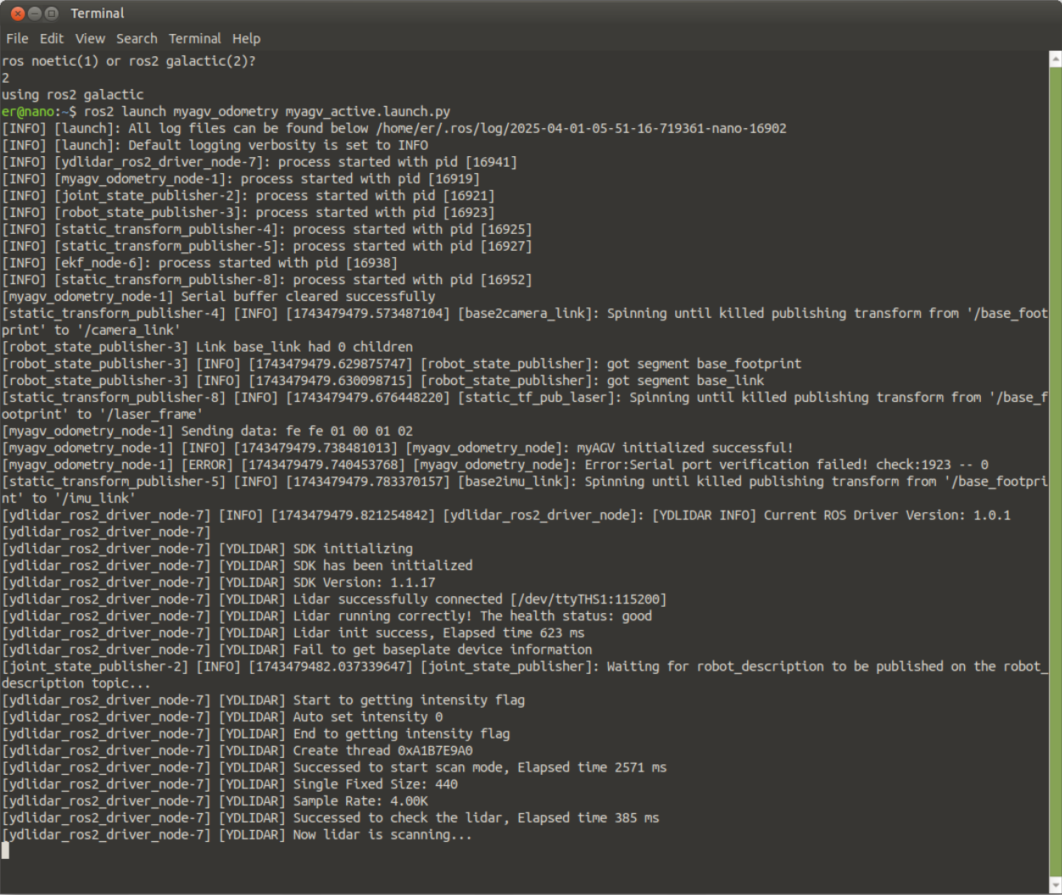
按下键盘Ctrl+Alt+T,打开第一个终端,输入指令
ros2 launch myagv_odometry myagv_active.launch.py
启动Nav2
按下键盘Ctrl+Alt+T,打开第二个终端,输入指令
ros2 launch myagv_navigation2 navigation2_active.launch.py
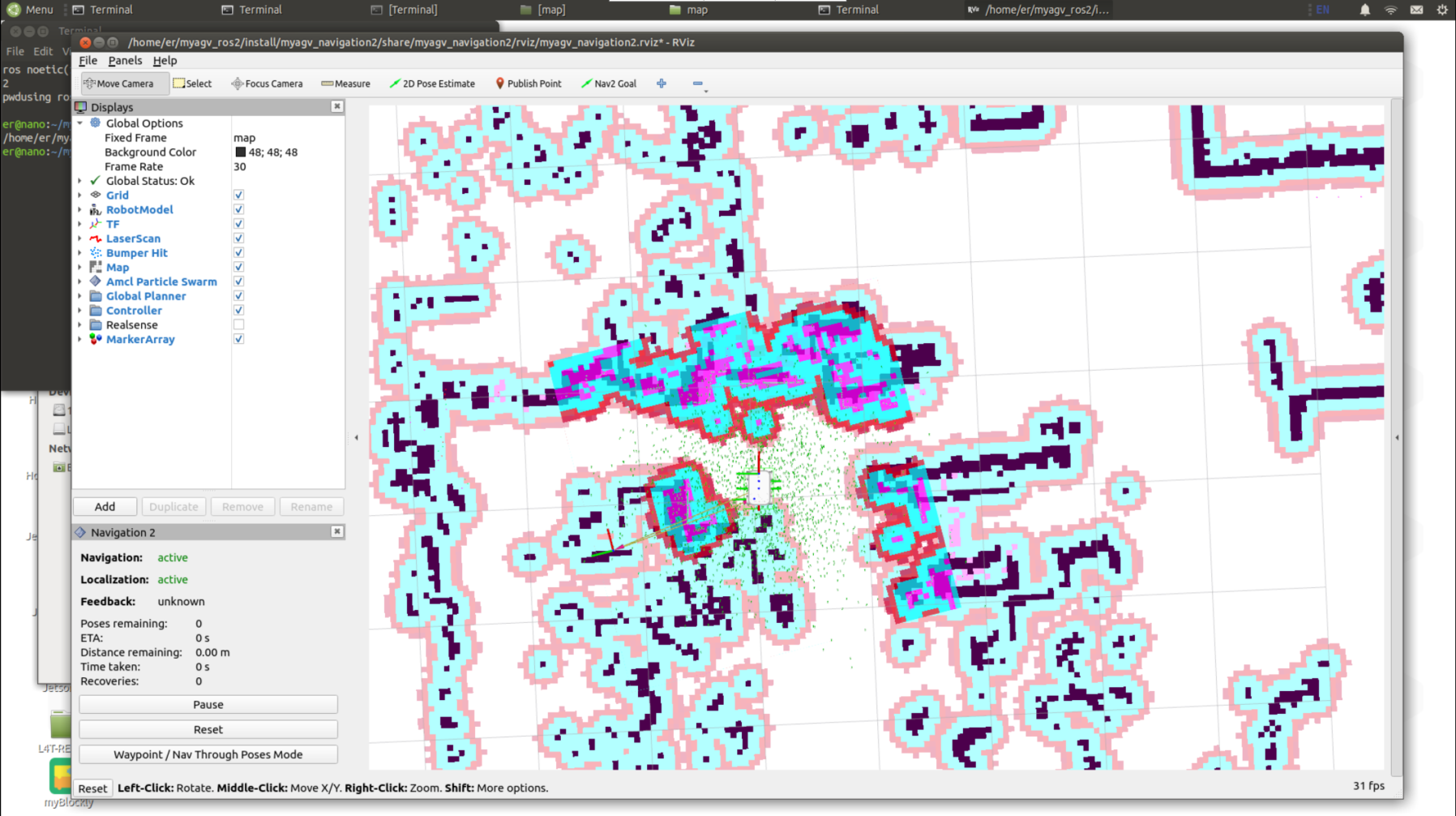
这将启动一个rviz
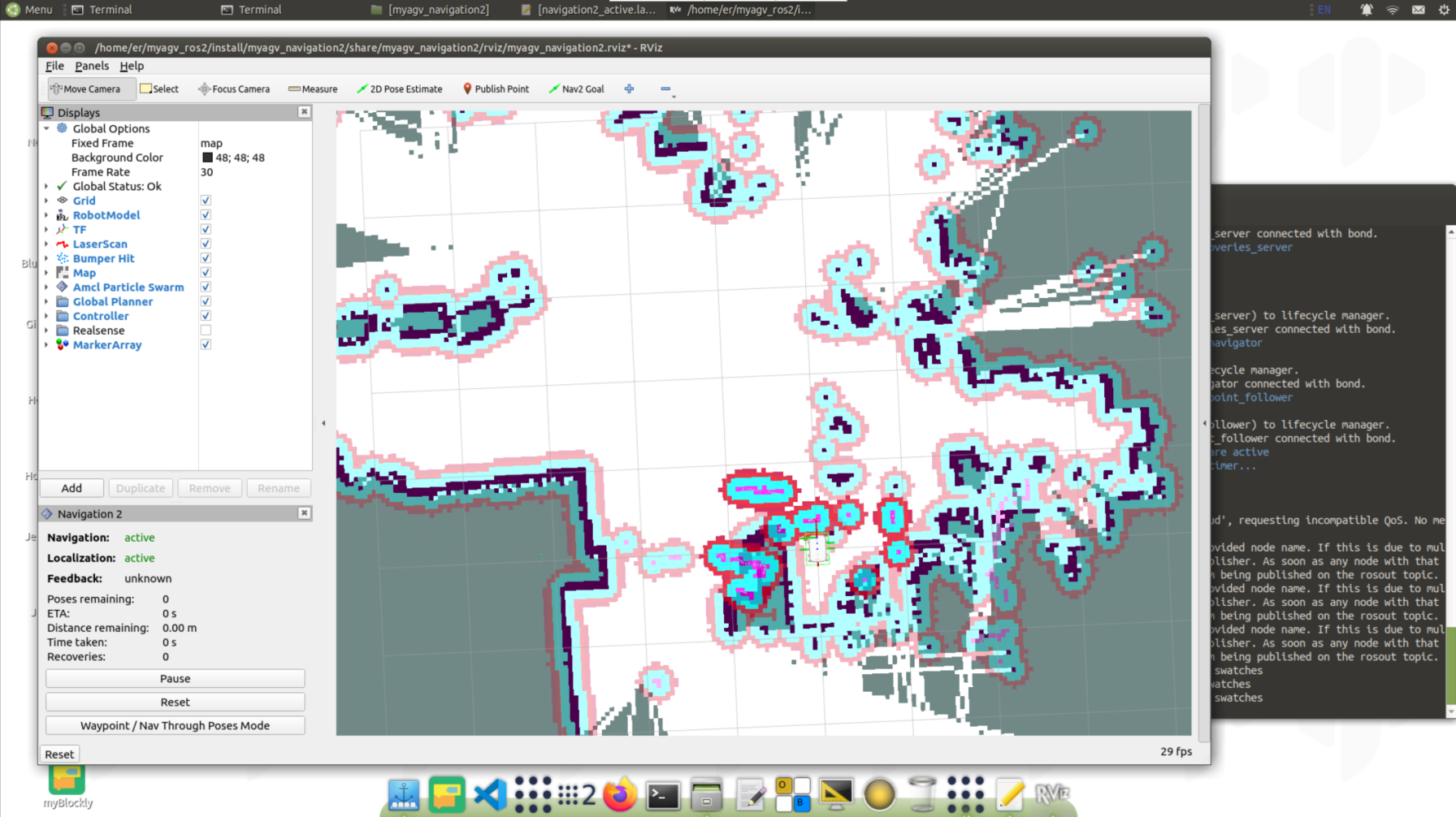
首先,在地图上找到机器人的位置。检查您的机器人在地图中的位置。
在 RViz 中设置机器人的姿势。单击 2D Pose Estimate 按钮,并在地图上指出机器人的位置。绿色箭头的方向是 myAGV 的方向。
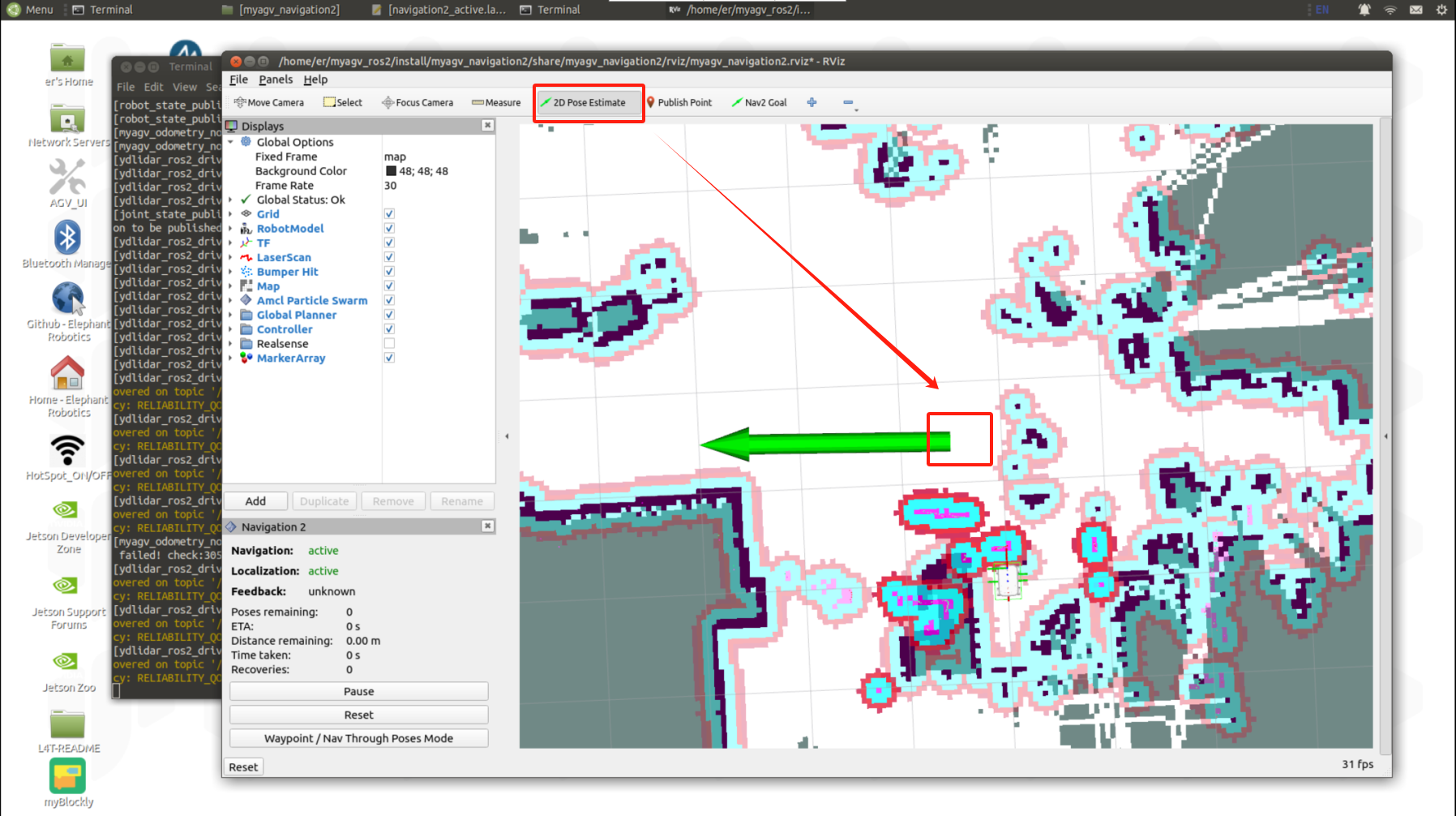
然后3D 模型会移动到该位置。观察激光雷达跟地图障碍物是否匹配,估计位置中的小误差是可以容忍的。
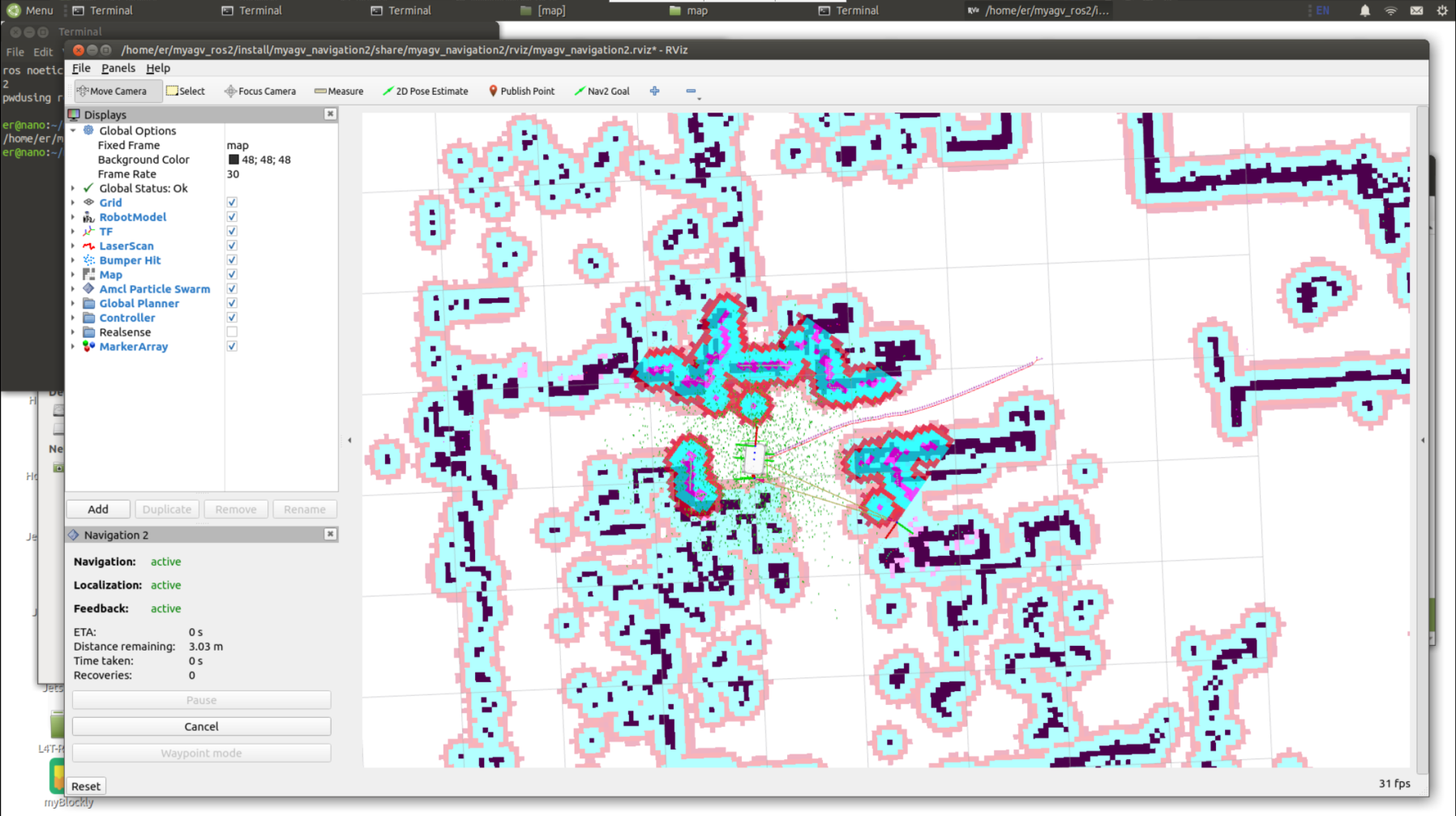
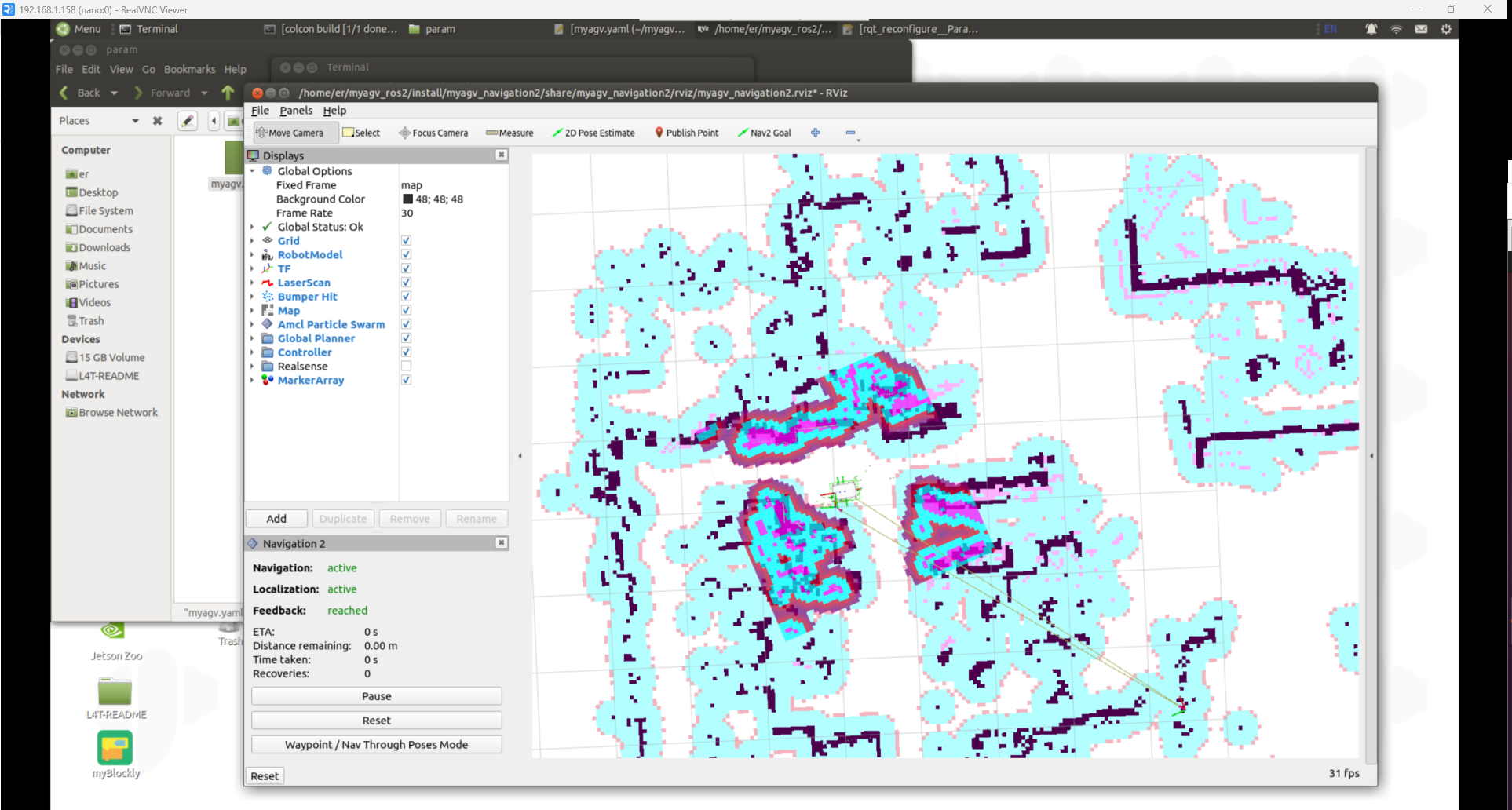
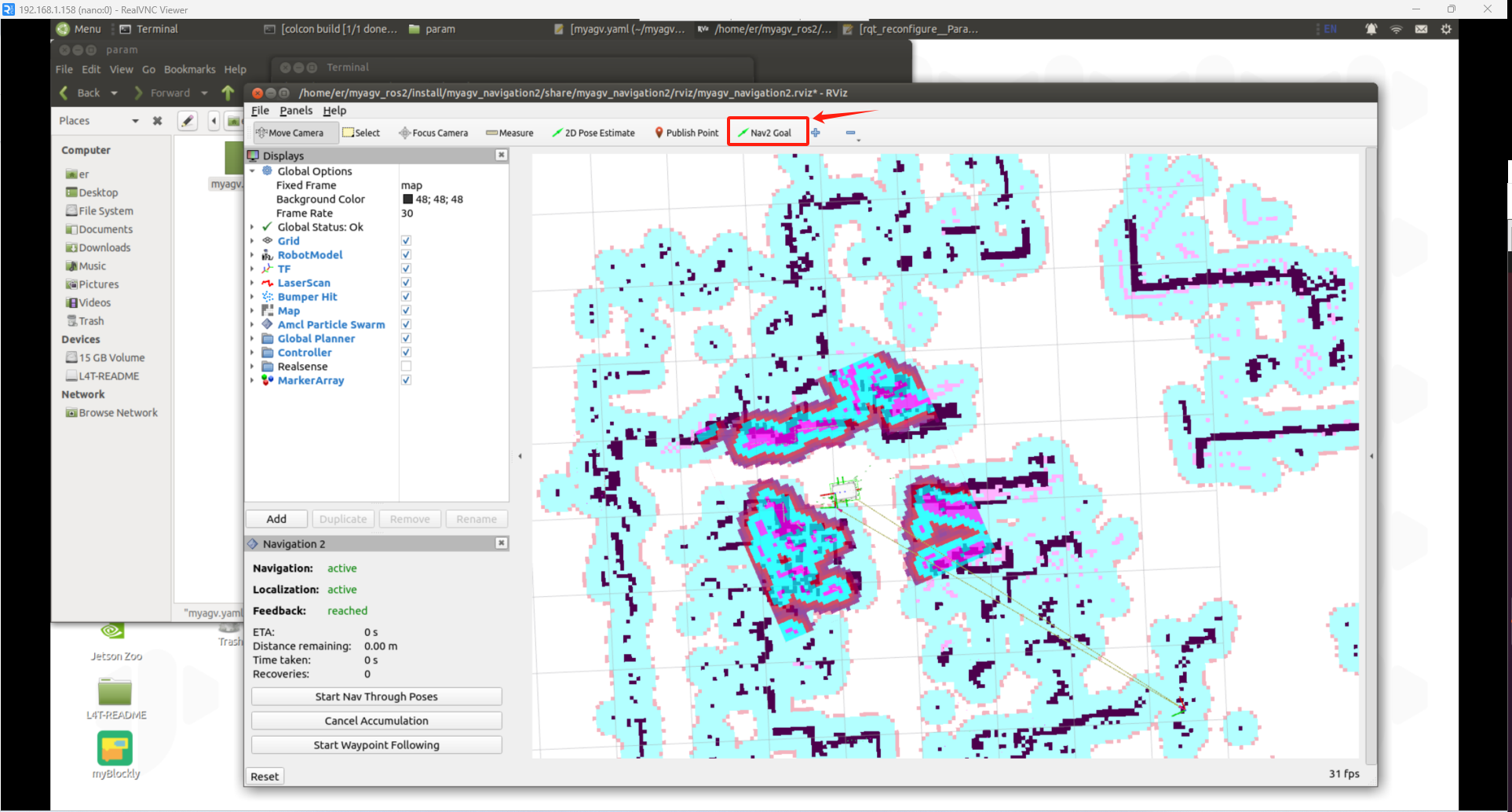
在地图上选择一个要导航的目标位置。使用Nav2 Goal按钮发送目标位置和目标方向。
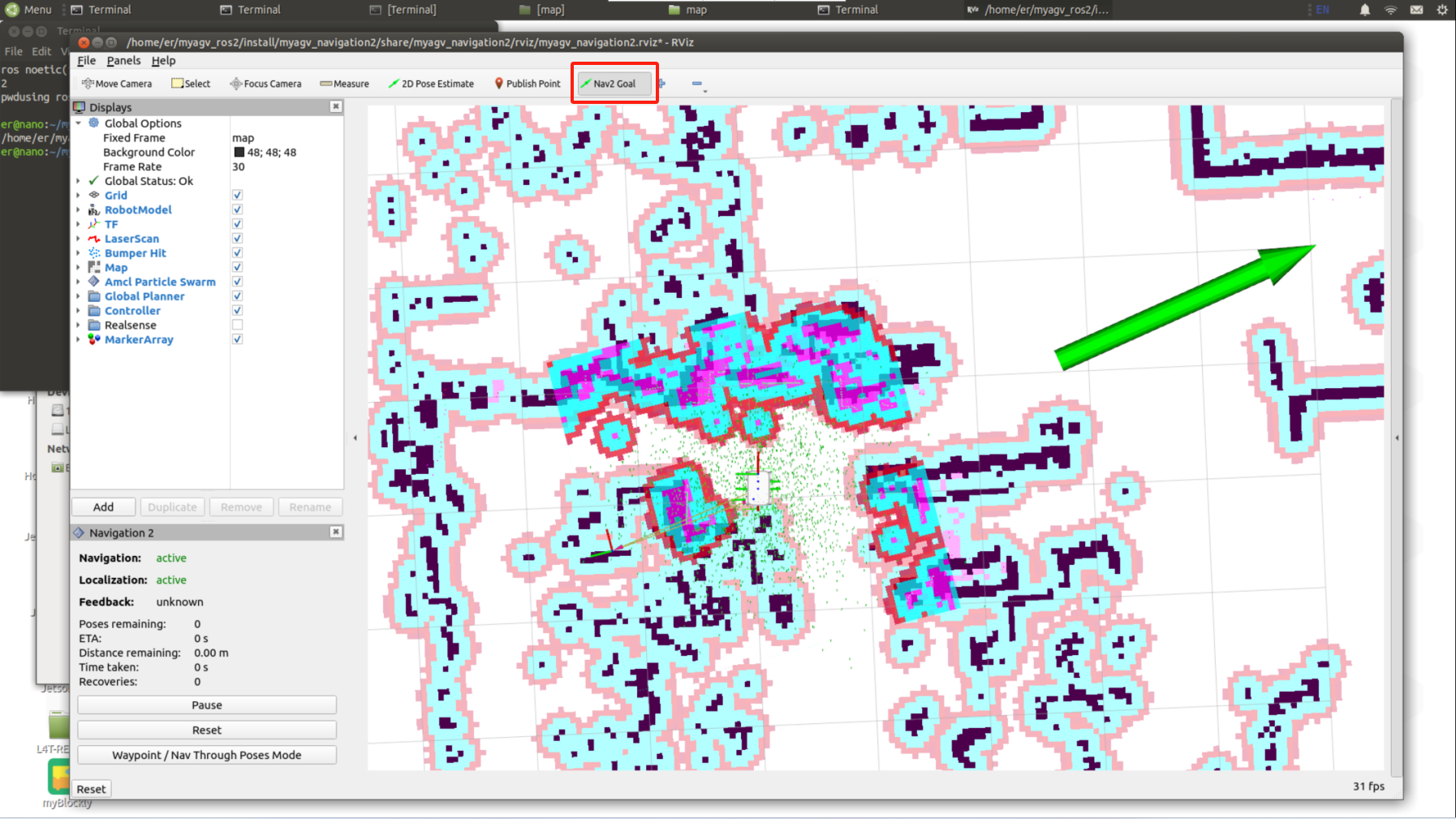
Nav2就会规划路径并发送运动指令,完成导航。
路径点跟随
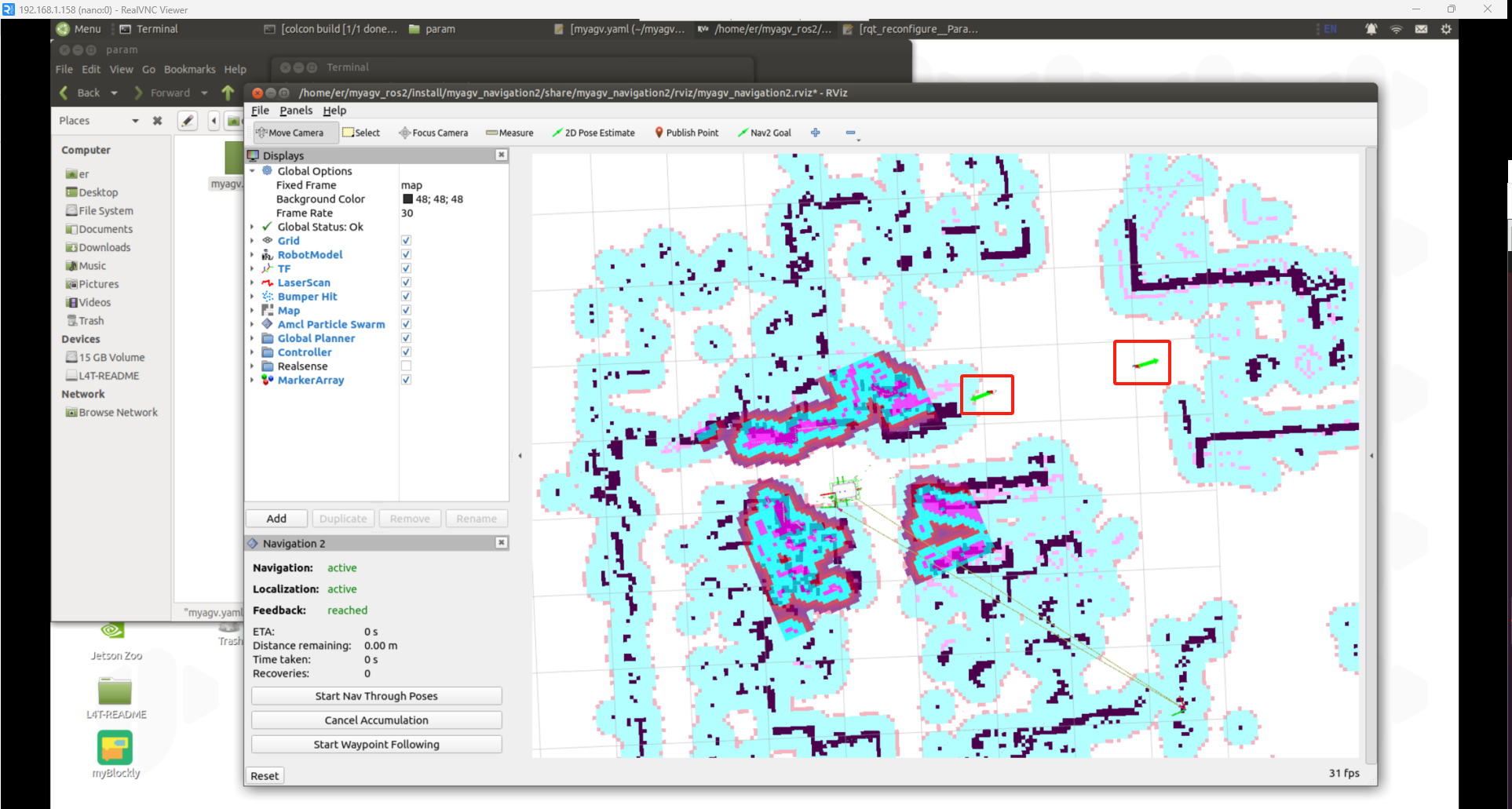
点击rviz2左下框的Waypoint/Nav Through Poses Mode,切换成路径点跟随模式
点击Nav2 Goal 发布两个导航点
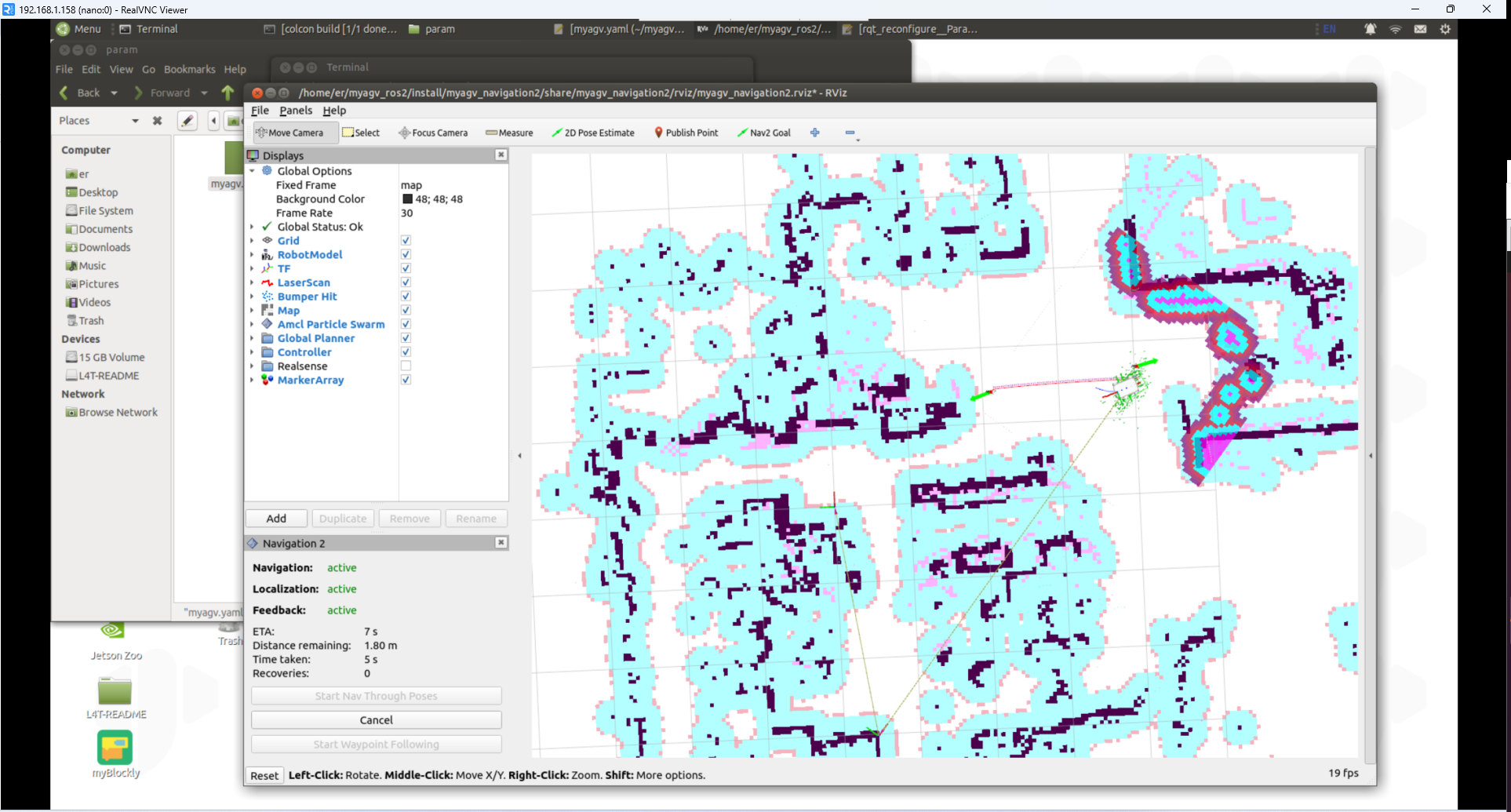
点击左下角的Start Waypoint Following,然后就会依次按顺序进行导航。
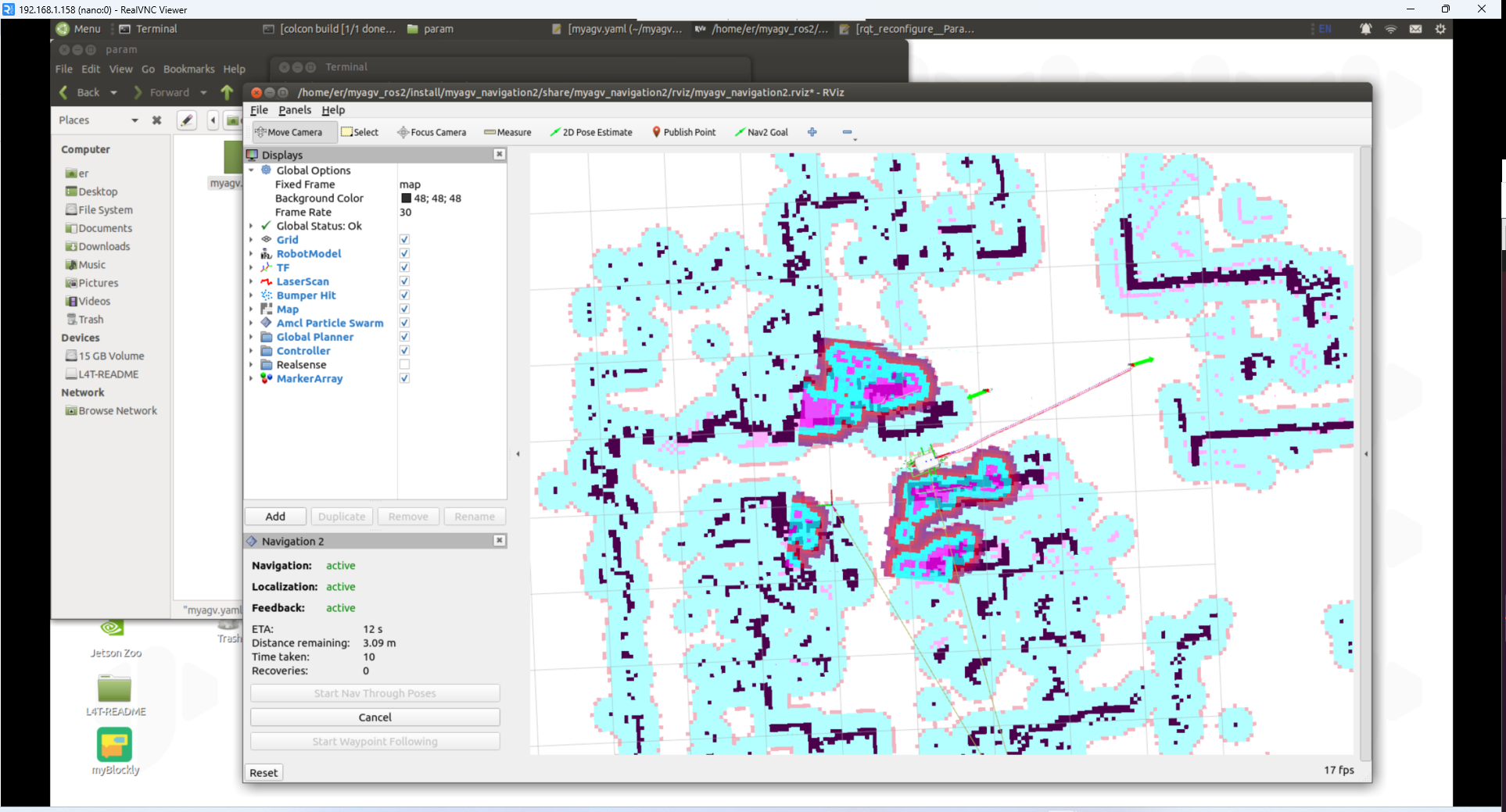
导航到第一个点位后,继续导航到第二点位
更改起始导航地图
在此之前,我们已经成功创建了空间地图,并获得了一组地图文件,即位于 ~/myagv_ros2/src/myagv_navigation2/map 目录下的 map.pgm 和 map.yaml,我们就是基于这两个地图文件的基础上进行导航的。下面将介绍如果基于其他地图导航。
方法一:修改launch.py文件
找到myagv_ros2/myagv_navigation2/launch/navigation2_active.launch.py文件,将第二十行的'map.yaml'改成你需要的加载的地图文件,然后通过colcon build编译。
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.substitutions import LaunchConfiguration
from launch.actions import DeclareLaunchArgument,IncludeLaunchDescription
from launch.conditions import IfCondition
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch_ros.actions import Node
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='false')
use_rviz = LaunchConfiguration('use_rviz', default='true')
map_dir = LaunchConfiguration(
'map',
default=os.path.join(
get_package_share_directory('myagv_navigation2'),
'map',
'map.yaml'))
param_file_name = 'myagv.yaml'
param_dir = LaunchConfiguration(
'params_file',
default=os.path.join(
get_package_share_directory('myagv_navigation2'),
'param',
param_file_name))
nav2_launch_file_dir = os.path.join(get_package_share_directory('nav2_bringup'), 'launch')
rviz_config_dir = os.path.join(
get_package_share_directory('myagv_navigation2'),
'rviz',
'myagv_navigation2.rviz')
return LaunchDescription([
DeclareLaunchArgument(
'map',
default_value=map_dir,
description='Full path to map file to load'),
DeclareLaunchArgument(
'params_file',
default_value=param_dir,
description='Full path to param file to load'),
DeclareLaunchArgument(
'use_sim_time',
default_value='false',
description='Use simulation (Gazebo) clock if true'),
IncludeLaunchDescription(
PythonLaunchDescriptionSource([nav2_launch_file_dir, '/bringup_launch.py']),
launch_arguments={
'map': map_dir,
'use_sim_time': use_sim_time,
'params_file': param_dir}.items(),
),
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
condition=IfCondition(use_rviz),
output='screen'),
])
方法二:启动launch时增加map的参数
在启动ros2 launch myagv_navigation2 navigation2_active.launch.py时,增加map:=参数。关于launch这部分写法,可以参考该链接。
ros2 launch myagv_navigation2 navigation2_active.launch.py map:=/home/er/myagv_ros2/src/myagv_navigation2/map/map_demo.yaml