MyAGV + 270M5 手柄遥控案例
功能:用手柄控制MyAGV + 270M5进行移动
1 硬件安装
机械臂安装
将270M5固定在AGV上

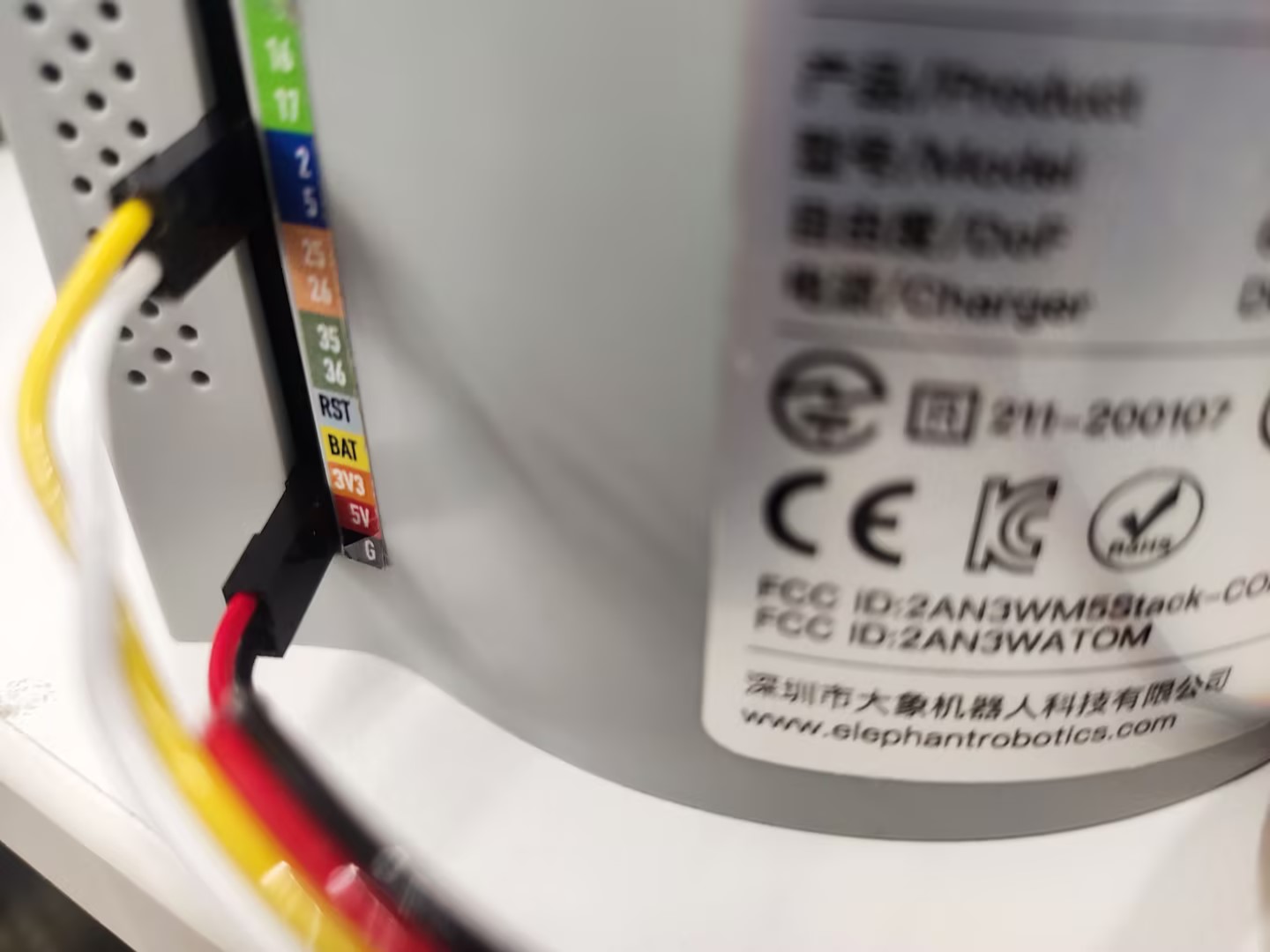
然后将12V电源线,Type-C线,手柄接收器参考下图进行接线后,按下AGV电源键即可

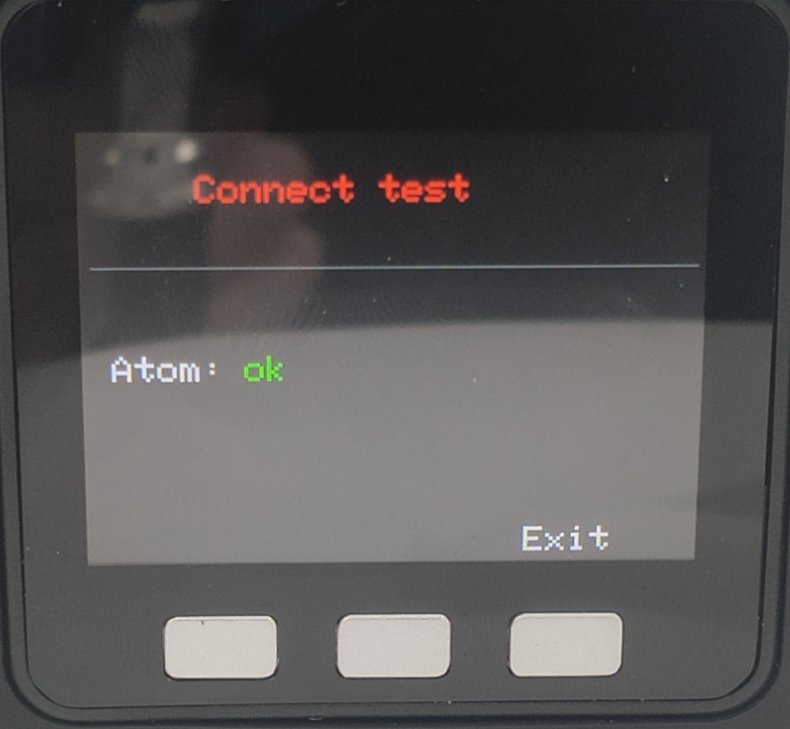
开机后,确保270M5底部屏幕显示ATOM:OK
末端工具可选择夹爪或吸泵
吸泵安装
将乐高连接件插入吸泵上预留的插孔中

将插好连接件的吸泵对准机械臂末端插孔插入

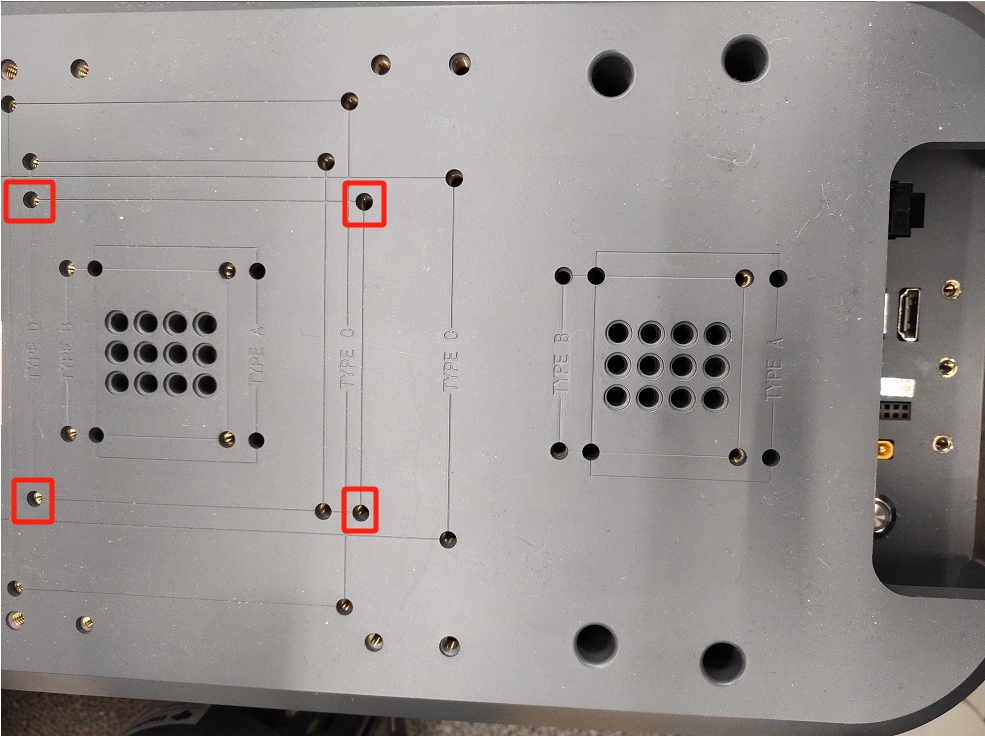
然后将公母杜邦线接到机械臂的底座IO
左侧为吸泵引脚,右侧为机械臂引脚 GND -> GND 5V -> 5V G2 -> 2 G5 -> 5
夹爪安装
将乐高连接件插入夹爪预留的插孔中

将插好连接件的夹爪对准机械臂末端插孔插入

将夹爪线插入机械臂控制接口

2 依赖库安装
pip install pygame pymycobot --upgrade
3 手柄功能说明

4 手柄激活
将手柄的开关打开

注意:第一次将手柄收发器插到AGV的USB接口上,或是重新拔插接收器以及AGV重启,都需要先执行下面的程序,对手柄进行激活
import pygame
import sys
import time
pygame.init()
pygame.joystick.init()
if pygame.joystick.get_count() > 0:
joystick = pygame.joystick.Joystick(0)
joystick.init()
while 1:
print("长按MODE键进入控制模式,MODE灯亮红灯,即可关闭此程序")
time.sleep(1)
else:
print("没有检测到手柄")
pygame.quit()
sys.exit()
执行程序后,长按手柄的MODE键,待手柄的MODE灯亮红灯后,即可松开MODE键


注意:只有MODE LED亮灯,才可以控制机械臂,如果手柄长时间不使用会进入待机状态,可以按一下手柄的START按键进行激活

5 案列复现
启动激光雷达
打开终端,运行下面指令
./myagv_ros/src/myagv_odometry/scripts/start_ydlidar.sh
启动里程计节点
roslaunch myagv_odometry myagv_active.launch
案列程序
运行下面程序后,终端打印init_ok,即可开始控制
from pymycobot import MechArm270
import pygame
import time
import sys
import rospy
from geometry_msgs.msg import Twist
import threading
class CmdVelPublisher:
def __init__(self):
rospy.init_node('cmd_vel_publisher', anonymous=True)
self.pub = rospy.Publisher('/cmd_vel', Twist, queue_size=10)
self.move_cmd = Twist()
self.move_cmd.linear.x = 0
self.move_cmd.linear.y= 0
self.move_cmd.angular.z = 0
self.rate = rospy.Rate(10)
self.publish_thread = threading.Thread(target=self.publish_cmd_vel)
self.publish_thread.daemon = True
self.publish_thread.start()
def publish_cmd_vel(self):
while not rospy.is_shutdown():
self.pub.publish(self.move_cmd)
self.rate.sleep()
def set_speed(self, x=0,y=0,yaw=0):
self.move_cmd.linear.x = x
self.move_cmd.linear.y = y
self.move_cmd.angular.z = yaw
pygame.init()
pygame.joystick.init()
button_pressed = False
hat_pressed=False
previous_state = [0,0,0,0,0,0]
cmd_vel_publisher = CmdVelPublisher()
mc=MechArm270("/dev/ttyACM0")
init_angles=[0, 0, 0, 0, 90, 0]
mc.sync_send_angles(init_angles,50)
count=100
mc.set_gripper_state(0,100)
time.sleep(1)
mc.set_fresh_mode(1)
arm_speed=10
print("init_ok")
def pump_on():
mc.set_basic_output(5, 0)
# time.sleep(0.05)
def pump_off():
mc.set_basic_output(5, 1)
# time.sleep(0.05)
mc.set_basic_output(2, 0)
# time.sleep(1)
mc.set_basic_output(2, 1)
# time.sleep(0.05)
def joy_handler():
global button_pressed
global hat_pressed
global previous_state
global count
if event.type == pygame.JOYAXISMOTION:
axis = event.axis
value = round(event.value, 2)
if abs(value) ==1.0:
flag = True
previous_state[axis] = value
if axis==0 and value==-1.00:
mc.jog_coord(2,1,arm_speed)
elif axis==0 and value==1.00:
mc.jog_coord(2,0,arm_speed)
if axis==1 and value==1.00:
mc.jog_coord(1,0,arm_speed)
elif axis==1 and value==-1.00:
mc.jog_coord(1,1,arm_speed)
if axis==2 and value==1.00:
mc.power_on()
if axis==4 and value==1.00:
cmd_vel_publisher.set_speed(x=-0.2)
elif axis==4 and value==-1.00:
cmd_vel_publisher.set_speed(x=0.2)
if axis==3 and value==1.00:
cmd_vel_publisher.set_speed(y=-0.2)
elif axis==3 and value==-1.00:
cmd_vel_publisher.set_speed(y=0.2)
if axis==5 and value==1.00:
cmd_vel_publisher.set_speed(yaw=-0.2)
elif axis==5 and value!=1.00:
cmd_vel_publisher.set_speed()
else:
if previous_state[axis] != 0:
cmd_vel_publisher.set_speed()
mc.stop()
previous_state[axis] = 0
if event.type == pygame.JOYBUTTONDOWN:
if joystick.get_button(0)==1:
count-=10
if count<0:
count=0
mc.set_gripper_value(count,100)
pass
if joystick.get_button(1)==1:
pump_on()
pass
if joystick.get_button(2)==1:
pump_off()
pass
if joystick.get_button(3)==1:
count+=10
if count>100:
count=100
mc.set_gripper_value(count,100)
pass
if joystick.get_button(4)==1:
mc.release_all_servos()
if joystick.get_button(5)==1:
cmd_vel_publisher.set_speed(yaw=0.2)
if joystick.get_button(7)==1:
mc.send_angles(init_angles,100)
if event.type == pygame.JOYBUTTONUP:
if event.button==5:
cmd_vel_publisher.set_speed()
if event.type == pygame.JOYHATMOTION:
hat_value = joystick.get_hat(0)
if hat_value ==(0,-1):
mc.jog_coord(3,0,arm_speed)
elif hat_value ==(0,1):
mc.jog_coord(3,1,arm_speed)
elif hat_value ==(-1,0):
mc.jog_angle(6,0,arm_speed)
elif hat_value ==(1,0):
mc.jog_angle(6,1,arm_speed)
if hat_value != (0, 0):
hat_pressed = True
else:
if hat_pressed:
cmd_vel_publisher.set_speed()
mc.stop()
hat_pressed = False
if pygame.joystick.get_count() > 0:
joystick = pygame.joystick.Joystick(0)
joystick.init()
else:
print("no handler")
pygame.quit()
sys.exit()
running = True
try:
while not rospy.is_shutdown():
for event in pygame.event.get():
joy_handler()
except KeyboardInterrupt:
#print("end")
pygame.quit()
sys.exit(0)
6 案例展示