ROS2
查看当前镜像版本
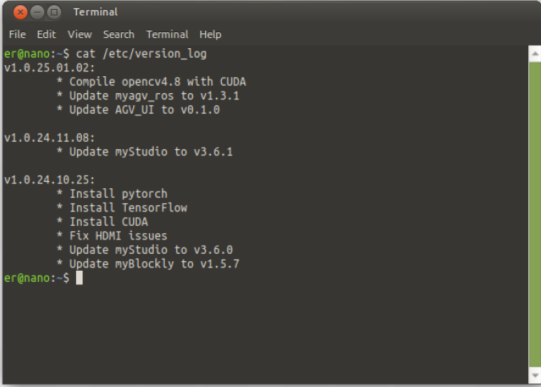
cat /etc/version_log
v1.0.25.01.02
myAGV_ROS2 v1.0.25.03.11 镜像版本,已经完成ROS2的功能集成,可以在跳转链接下载最新镜像,并烧录镜像系统到tf卡中。
v1.0.25.03.11 镜像版本下面部分无需操作,只当作参考了解ros2知识。

如果myAGV_ROS2是v1.0.25.01.02镜像系统,可以根据下面操作进行适配ros2功能。
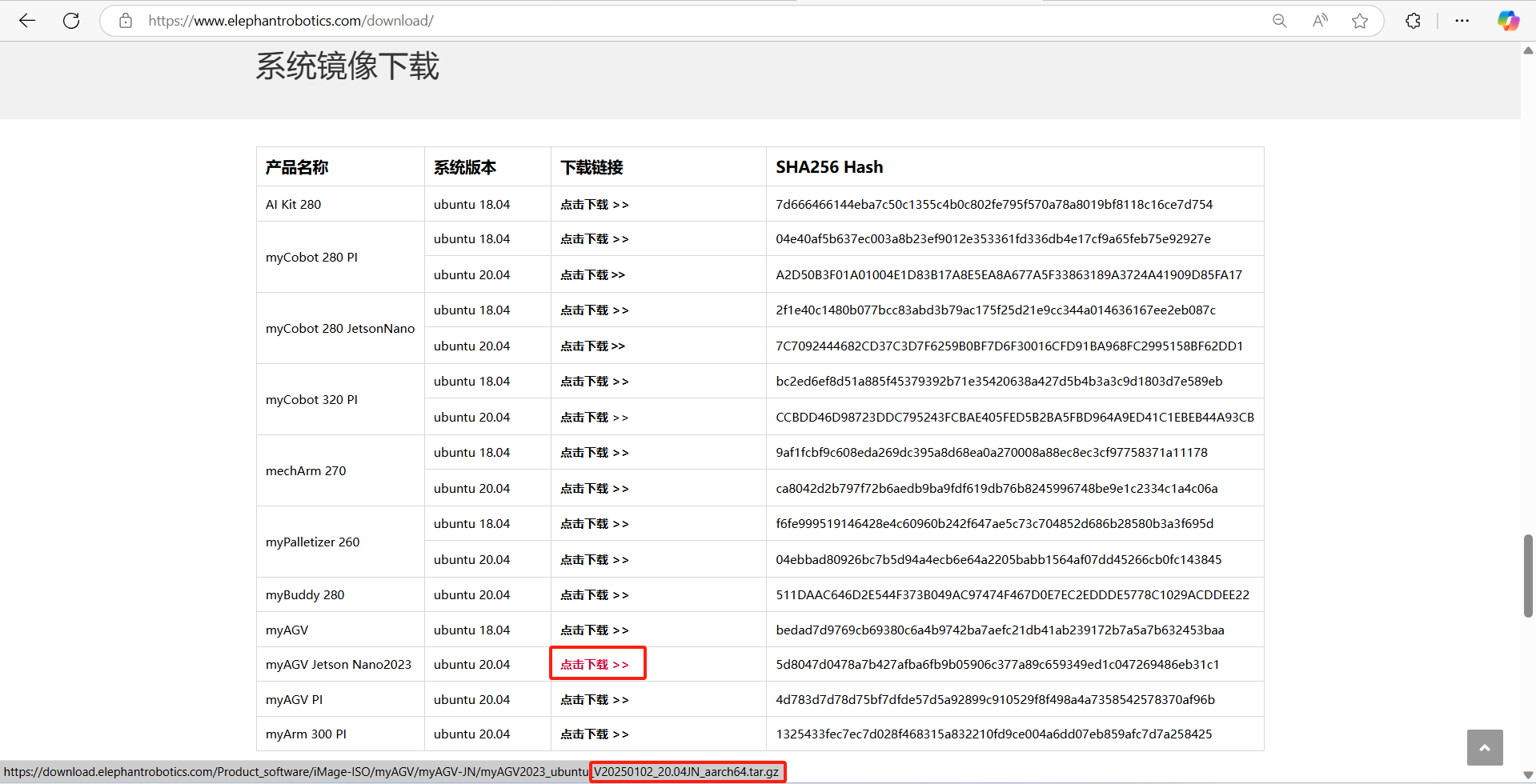
如果不是该版本,可以到这里进行下载v2025102的系统镜像,根据这个使用说明)进行操作。
修改~/.bashrc切换ros1和ros2的环境变量
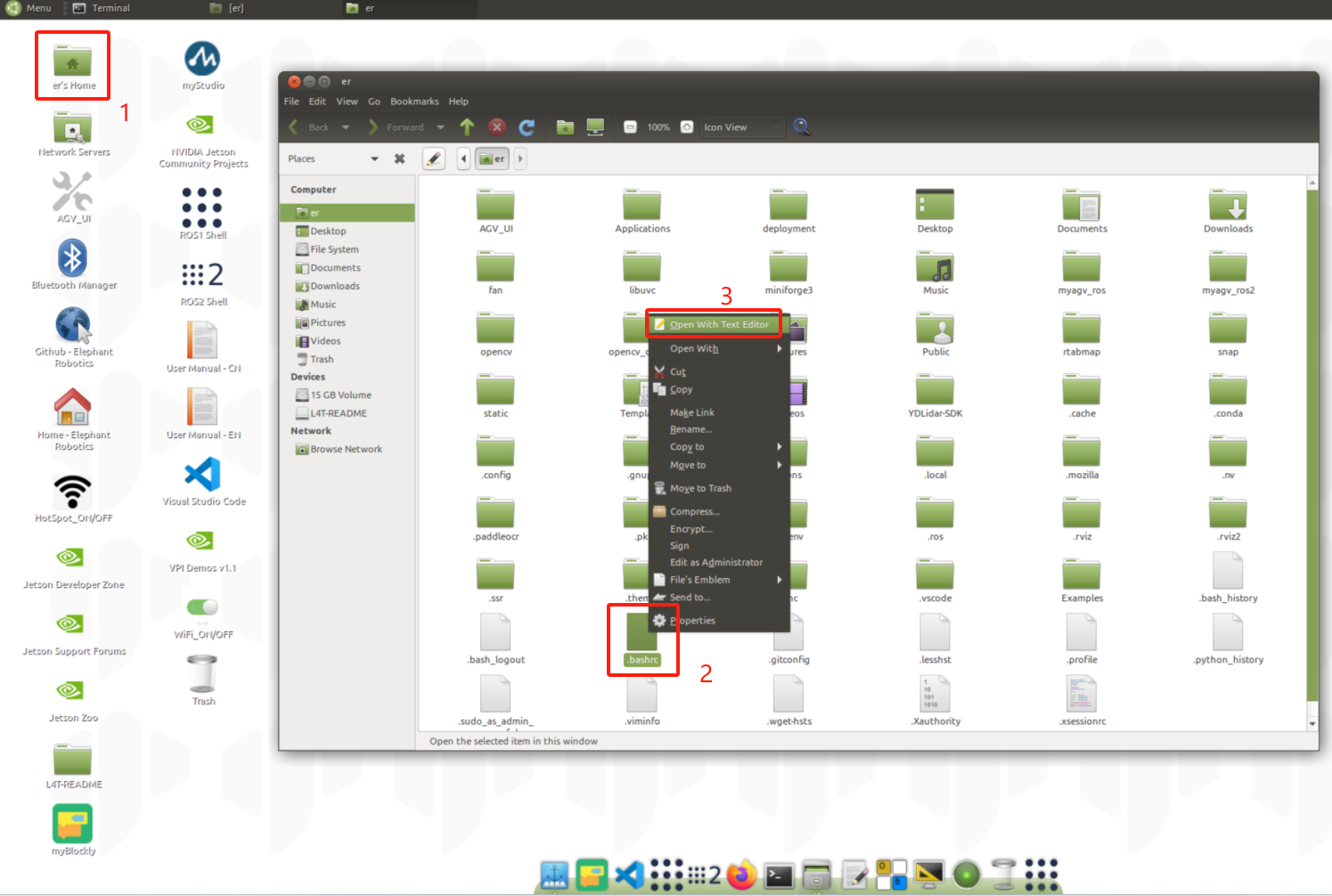
点开er's Home,然后按下键盘Ctrl + H 打开隐藏文件,并找到 .bashrc这个文件
将这四行ros1环境变量
source /opt/ros/noetic/setup.bash
source ~/myagv_ros/devel/setup.bash
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311

改写如下,增加ros2的环境变量
echo "ros noetic(1) or ros2 galactic(2)?"
read edition
if [ "$edition" -eq "1" ];then
source /opt/ros/noetic/setup.bash
source ~/myagv_ros/devel/setup.bash
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311
echo using ros noetic
else
source /opt/ros/galactic/setup.bash
source ~/myagv_ros2/install/local_setup.bash
echo using ros2 galactic
fi
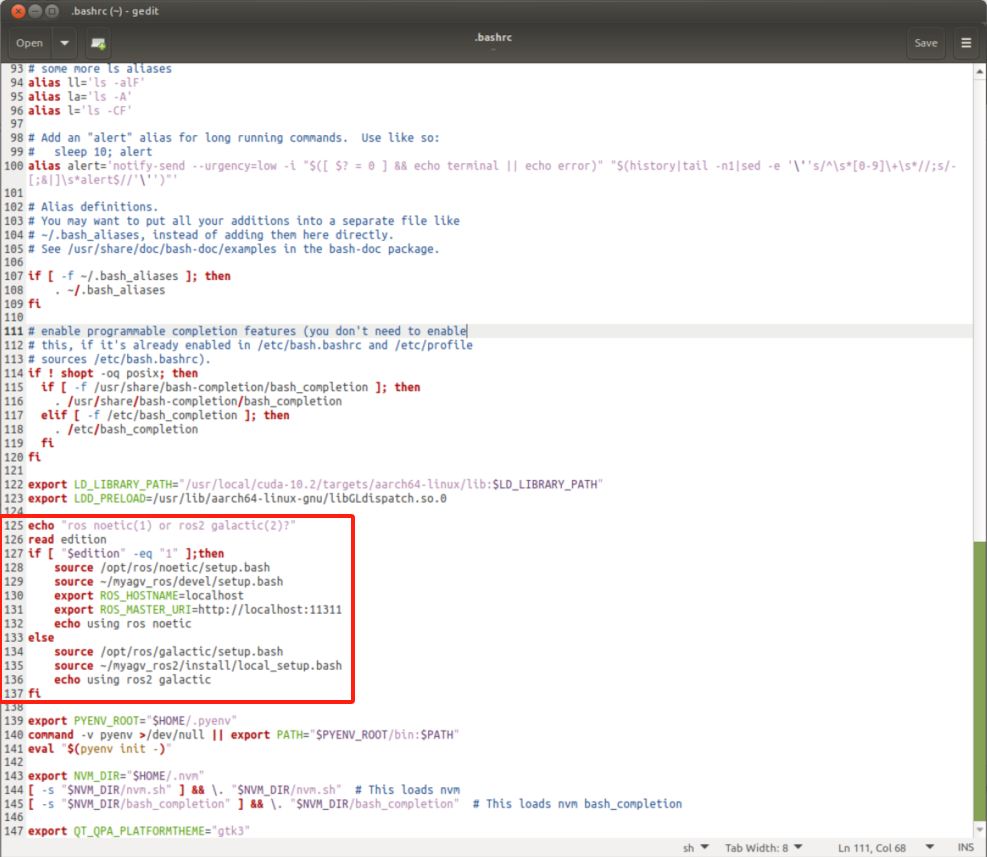
每次打开终端前都需要输入数字“1”或“2”,来激活ros1还是ros2的环境。

编译ros2代码
打开一个终端,拉取myagv_ros2的galactic-JN分支代码
git clone -b galactic-JN https://github.com/elephantrobotics/myagv_ros2.git myagv_ros2/src
然后,通过rosdep安装依赖包
cd ~/myagv_ros2
rosdep install --from-paths src --ignore-src -r -y
还需要手动安装下面的依赖包
sudo apt install ros-galactic-bondcpp \
ros-galactic-test-msgs* \
ros-galactic-behaviortree-cpp-v3* \
ros-galactic-ompl \
ros-galactic-joint-state-publisher \
ros-galactic-rqt-tf-tree \
ros-galactic-diagnostic-updater \
ros-galactic-camera-info-manager -y
最后编译源码,第一次编译过程会比较慢,需要耐心等待。
注意:一定要在~/myagv_ros2 路径下进行编译
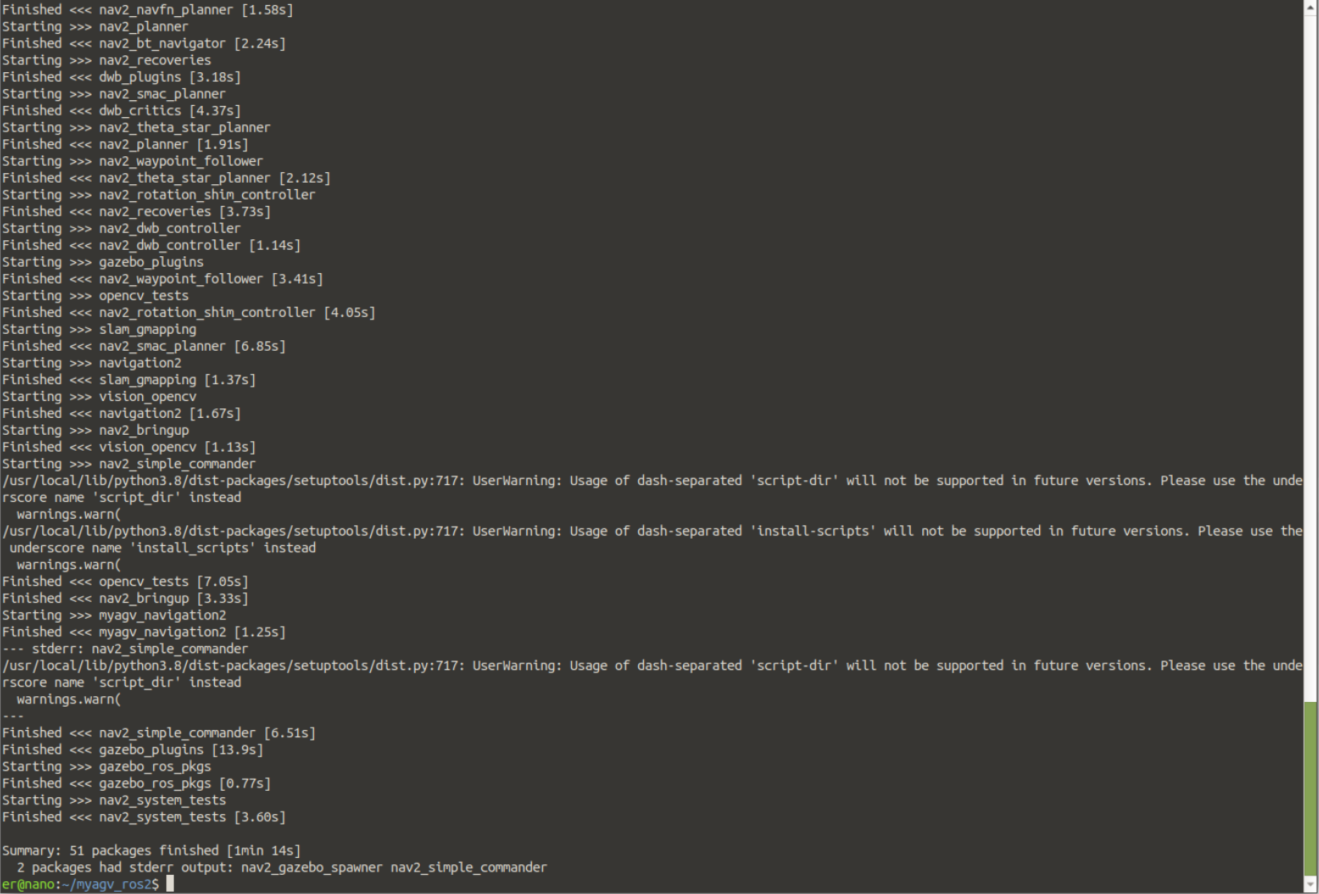
colcon build
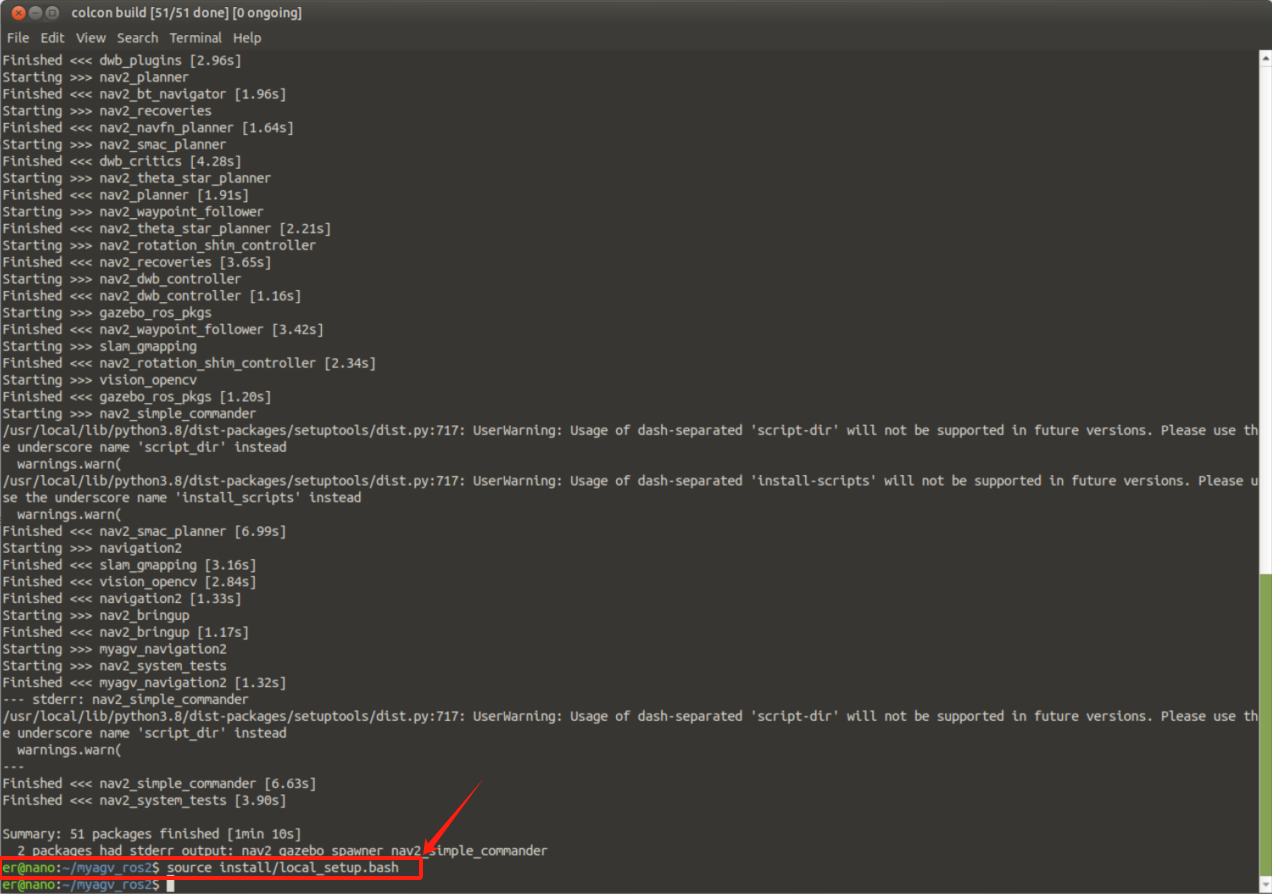
编译成功会提示Summary: 51 packages finished
每次编译完后,记得source ros2的环境变量
source install/local_setup.bash
myagv_ros2放在github进行管理,可以通过git更新到新版本
cd ~/myagv_ros2/src
git pull
cd ..
colcon build
ROS2基础知识
- ros1 组件用c++/python,ros2 组件用c/python;
- ros1 只支持Linux和MacOS,而 ros2 支持Linux/Windows/MacOS/RTOS;
- ros1 的通讯基于TCPROS/UDPROS,强依赖于master节点的处理,而 ros2 基于DDS(分布式架构);
- ros2 支持实时控制;
- ros2 广泛使用C++11,和Python3.5以上;
- ros2 使用了新的编译系统 Ament;
- 在 ros2 上通过ros_bridge和 ros1 进行通信;
- ros2 使用托管启动:用户可以指定节点启动顺序;
- ros2 取消了 nodelet 的概念,支持多节点初始化;
- ros2 launch文件使用 python 编写,相比于 xml 拓展了功能性。
ros2指令改动如下
rosrun --> ros2 run
rosnode --> ros2 node
roslaunch --> ros2 launch
rosparam --> ros2 param
rospkg --> ros2 pkg
rosservice --> ros2 service
rossrv --> ros2 srv
rostopic --> ros2 topic
rosaction --> ros2 action
clocon build
--packages-up-to:构建您想要的包,以及它的所有依赖项,但不是整个工作区(节省时间)--symlink-install:让您不必在每次调整 Python 脚本时重建--event-handlers console_direct+: 在构建时显示控制台输出(否则可以在log目录中找到)--executor sequential:逐个处理包,而不是使用并行性
只编译你想要的功能包
colcon build --packages-select my_package
限制核心数
colcon build --jobs 2