使用 Gmapping 实时建图
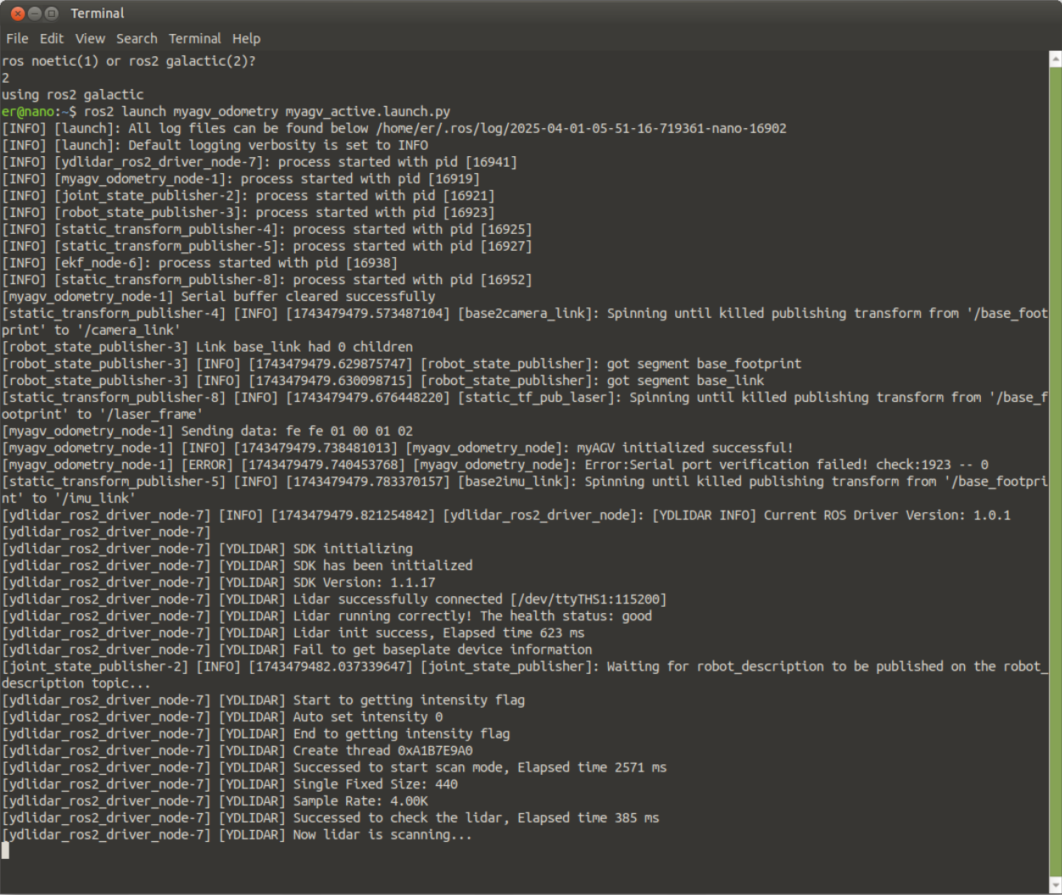
按下键盘Ctrl+Alt+T,打开第一个终端,输入指令
ros2 launch myagv_odometry myagv_active.launch.py
按下键盘Ctrl+Alt+T,打开第二个终端,输入指令
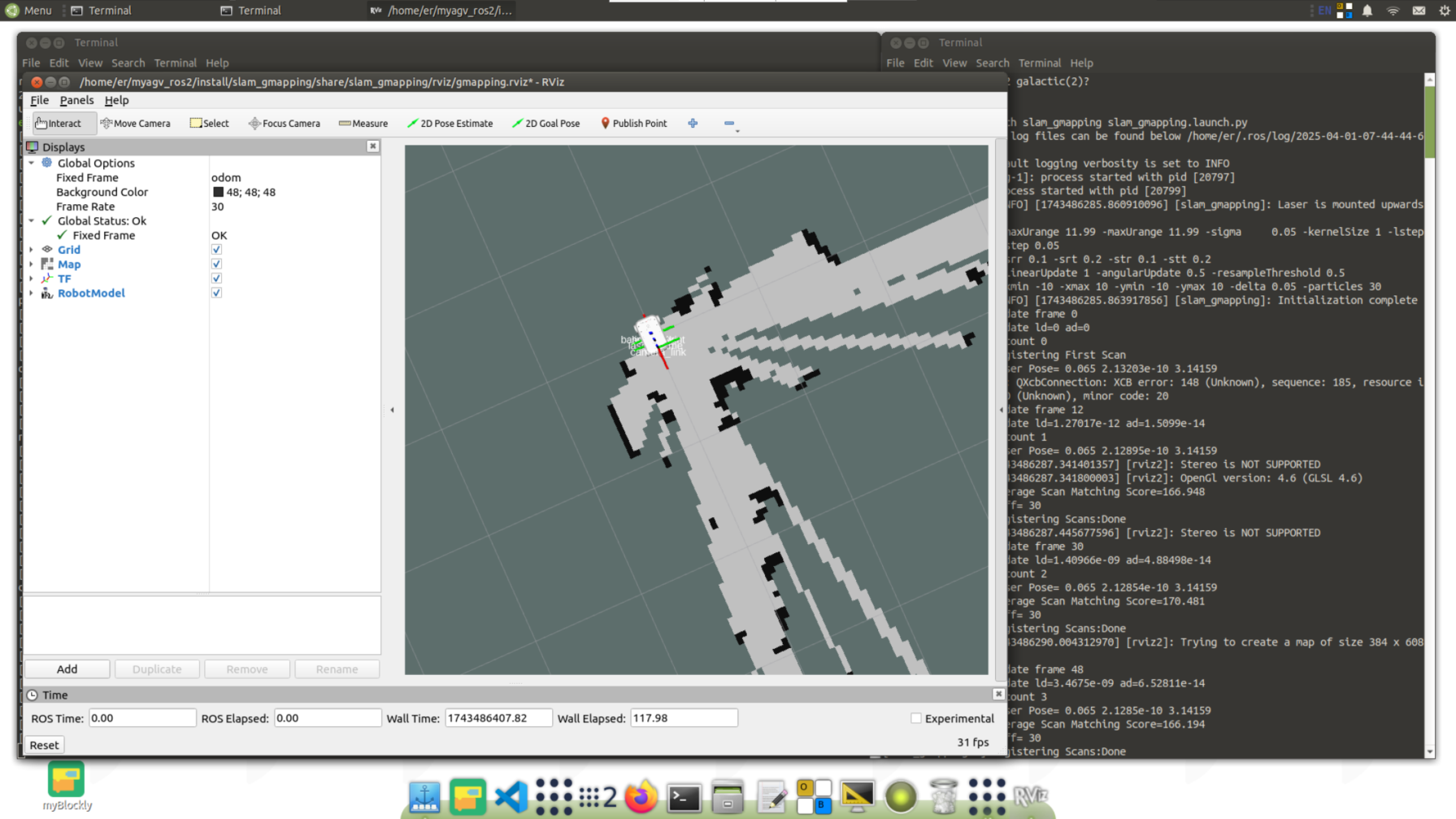
ros2 launch slam_gmapping slam_gmapping.launch.py
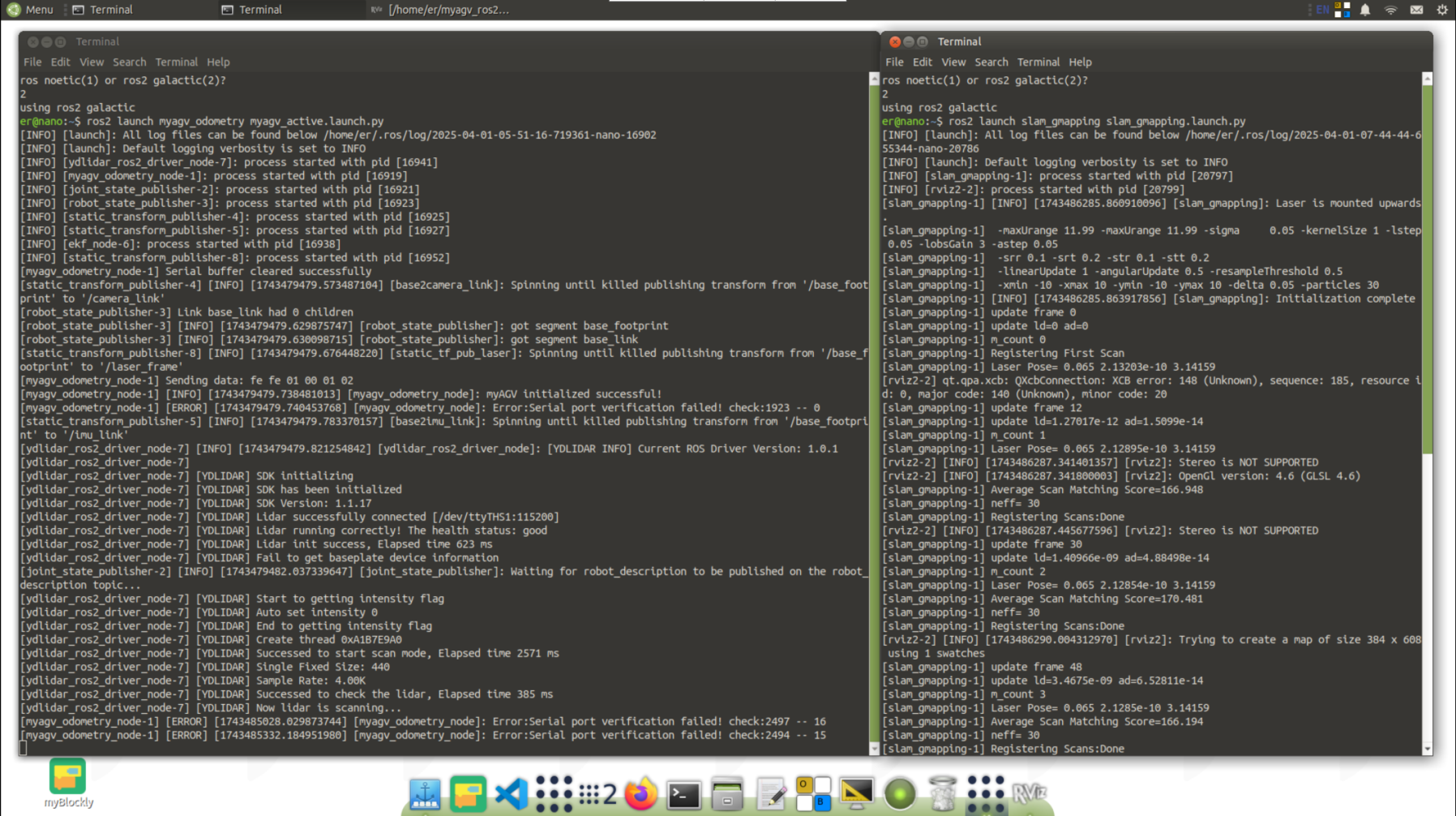
同时也会打开一个rviz界面
按下键盘Ctrl+Alt+T,打开第三个终端,输入指令
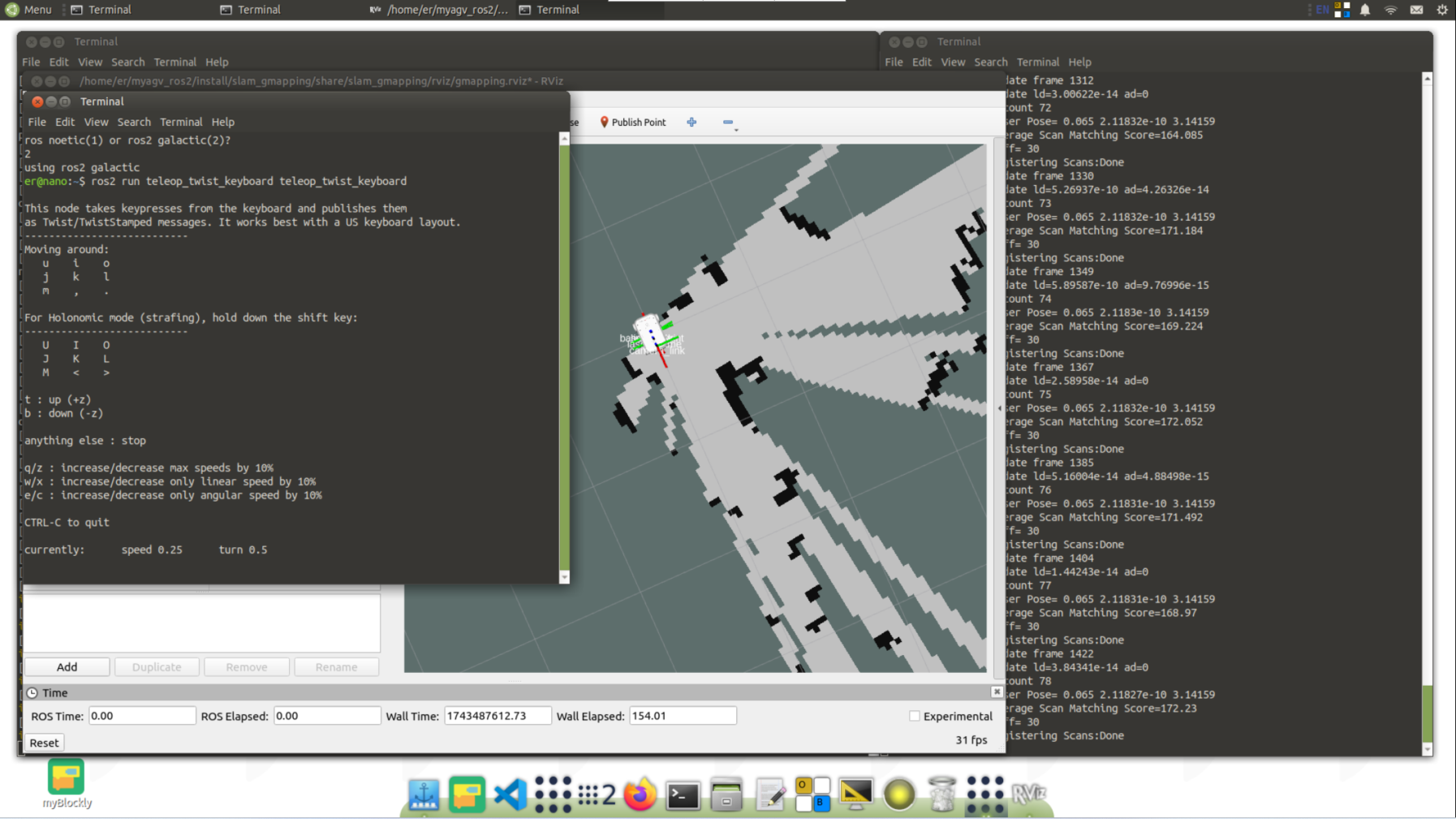
ros2 run teleop_twist_keyboard teleop_twist_keyboard
确保鼠标点击选中该终端,这样键盘控制才能控制myAGV。
注意事项: 1.为了避免造成机器损坏,运动前确保myAGV不会撞到其他物体 2.myAGV的ros2的键盘控制方式和ros1的控制方式不一样,ros2的键盘控制需要按下键盘'k'才能让myAGV停止运动。
---------------------------
Moving around:
u i o
j k l
m , .
For Holonomic mode (strafing), hold down the shift key:
---------------------------
U I O
J K L
M < >
t : up (+z)
b : down (-z)
anything else : stop
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
CTRL-C to quit
currently: speed 0.25 turn 0.5
| 按键 | 按键描述 |
|---|---|
| i | 向前移动 |
| , | 向后移动 |
| j | 原地逆时针旋转 |
| l | 原地顺时针旋转 |
| u | 左转弯前进 |
| o | 右转弯前进 |
| k | 停止移动 |
| m | 左转弯后退 |
| . | 右转弯后退 |
| I | 向前移动 |
| < | 向后移动 |
| J | 向左平移 |
| L | 向右平移 |
| U | 向左45°斜向前行 |
| O | 向右45°斜向前行 |
| M | 向左45°斜向后退 |
| > | 向右45°斜向后退 |
| q | 提高线速度和角速度 |
| z | 降低线速度和角速度 |
| w | 提高线速度 |
| x | 降低线速度 |
| e | 增加角速度 |
| c | 降低角速度 |
建议在gmapping建图时,键盘控制时将线速度设为 0.2,角速度设为 0.4,在建图的同时,您可以在RVIZ空间中观察到,随着myAGV的移动,我们的地图逐渐被构造。
构建完你需要的地图,就按下键盘Ctrl+Alt+T,打开第四个终端,输入指令
ros2 run nav2_map_server map_saver_cli -f ~/map

-f 参数后面可以加上路径和地图文件名称,给地图参数文件增加后缀名
注意:后缀名的文件夹路径要写正确,不然会报错
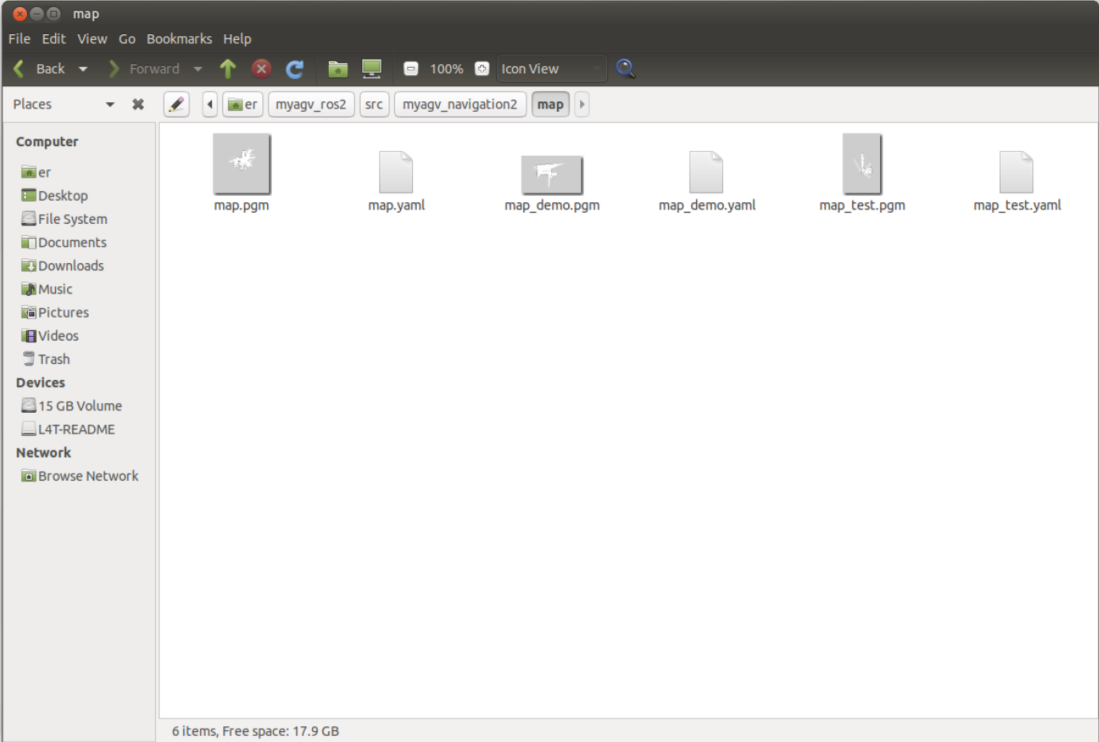
ros2 run nav2_map_server map_saver_cli -f ~/myagv_ros2/src/myagv_navigation2/map/map_test
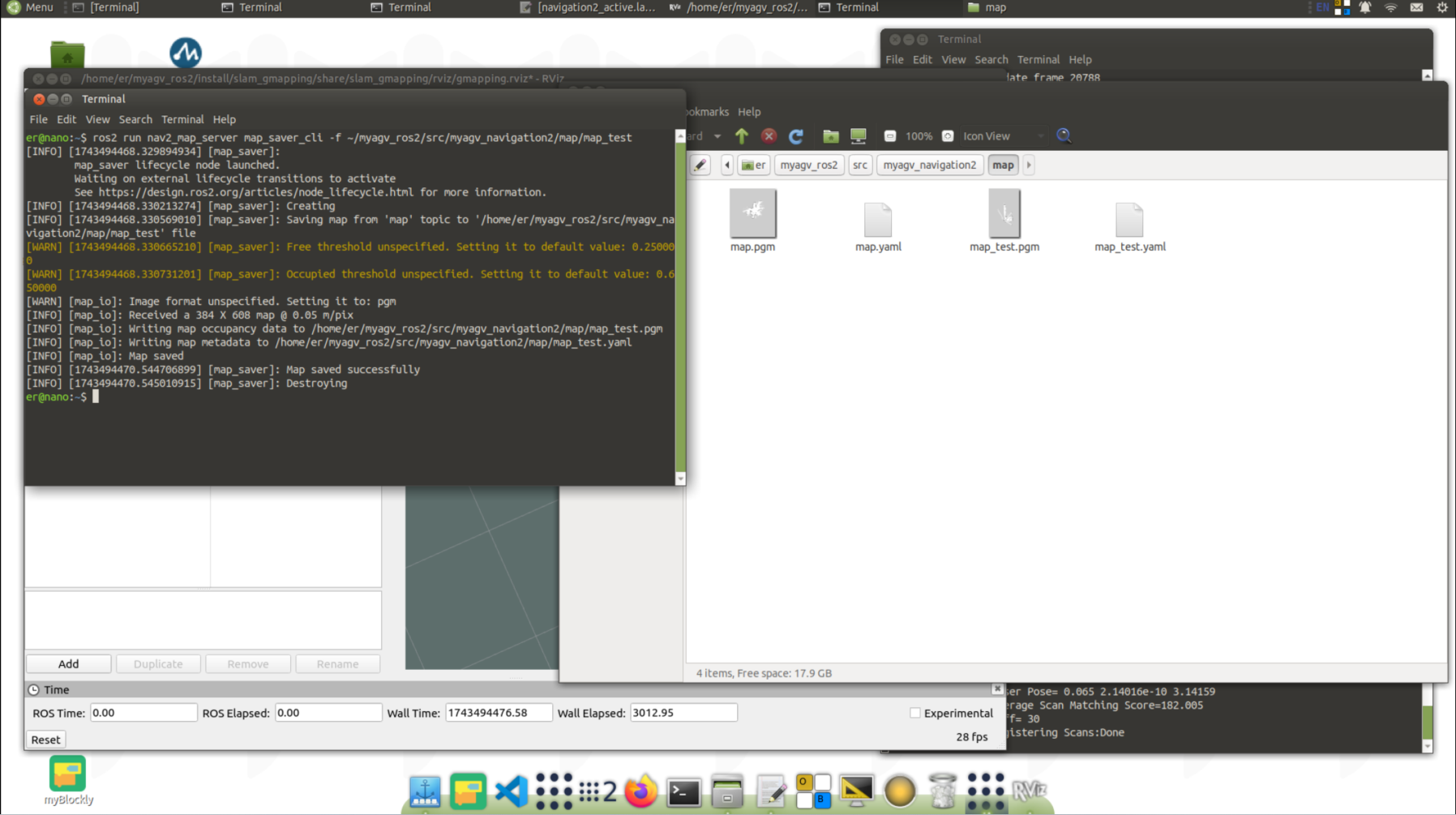
这样我们就会在当前路径下,生成map_test.yaml和map_test.pgm的地图参数文件,增加后缀这样做的好处就是便于管理自己需要的地图,避免出现覆盖掉之前辛苦建好的地图文件。
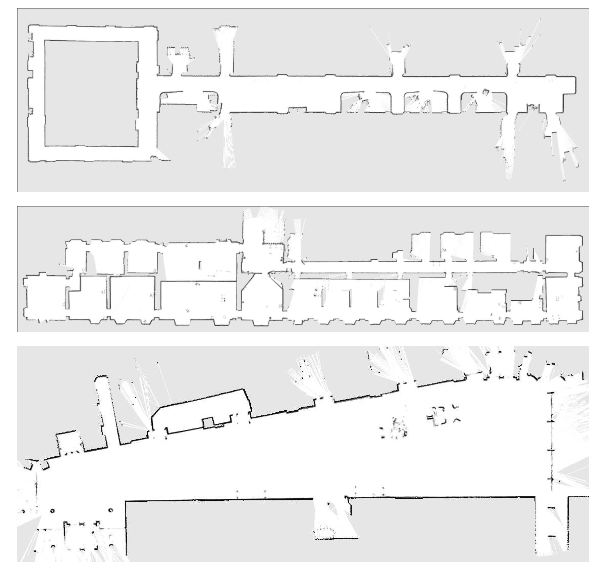
保存后可在/home/er/myagv_ros2/src/myagv_navigation2/map路径下查看所保存地图的图片形式,为 pgm 格式。