<<<<<<< HEAD
Drag the teach-in
Robot drag teaching means that the operator can directly drag the joints of the robot to make an ideal posture, and then record accordingly.
Cobot was one of the earliest systems to have this feature. This teaching method avoids the disadvantages of traditional teaching and is a forward-looking technology for robot application.
In this chapter, we'll teach you how to get started with it and experience the fun of cobot dragging.
The approximate steps for them are as follows:
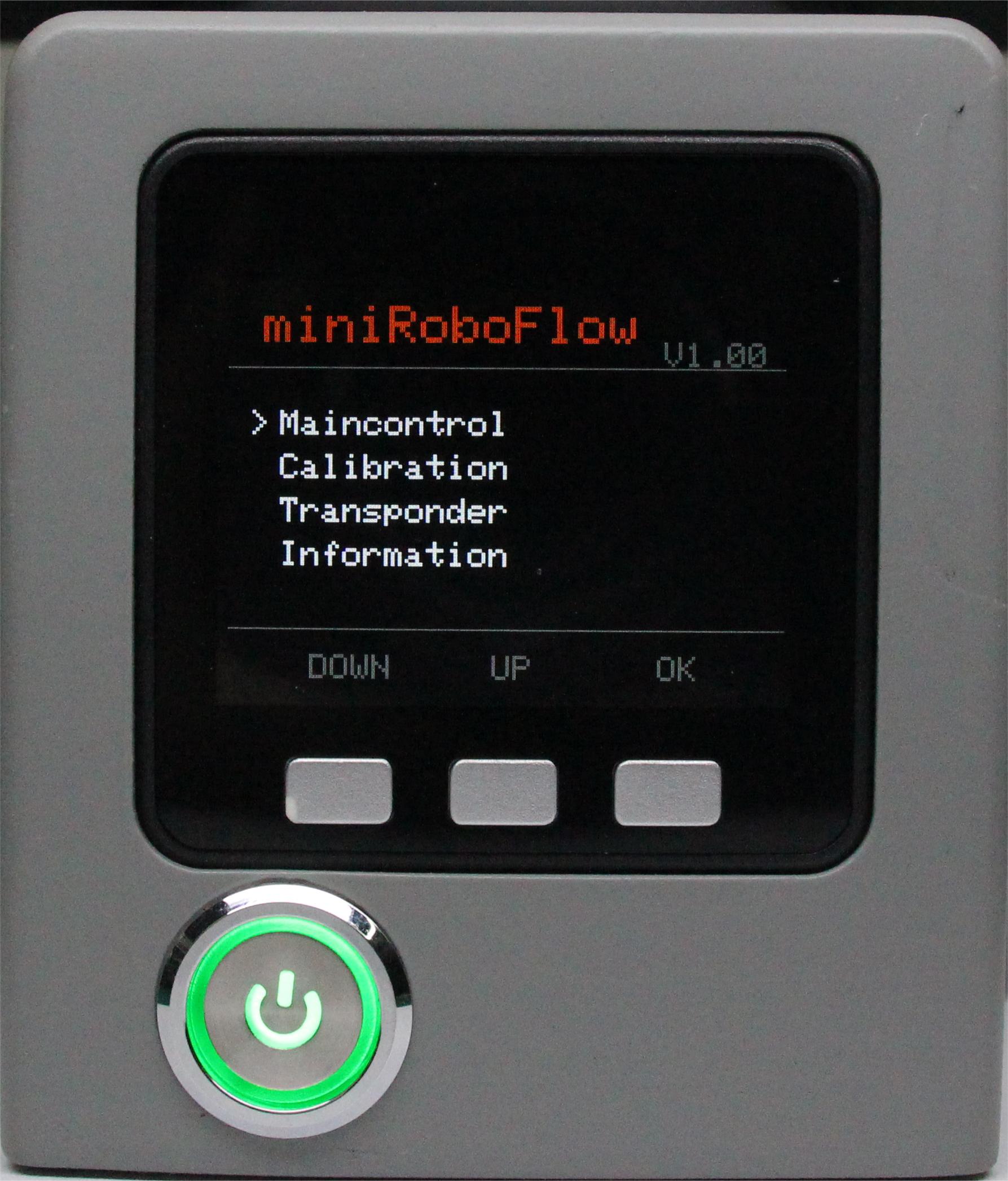
Step 1: Select Maincontrol and click OK to enter the drag teaching interface.
 Step 2: Press the Record button.
Step 2: Press the Record button.
 Step 3: Select the storage path and press Ram.
Step 3: Select the storage path and press Ram.
 Step 4: Drag the joints of the robotic arm to move to your desired position to complete a set of movements.
Step 4: Drag the joints of the robotic arm to move to your desired position to complete a set of movements.
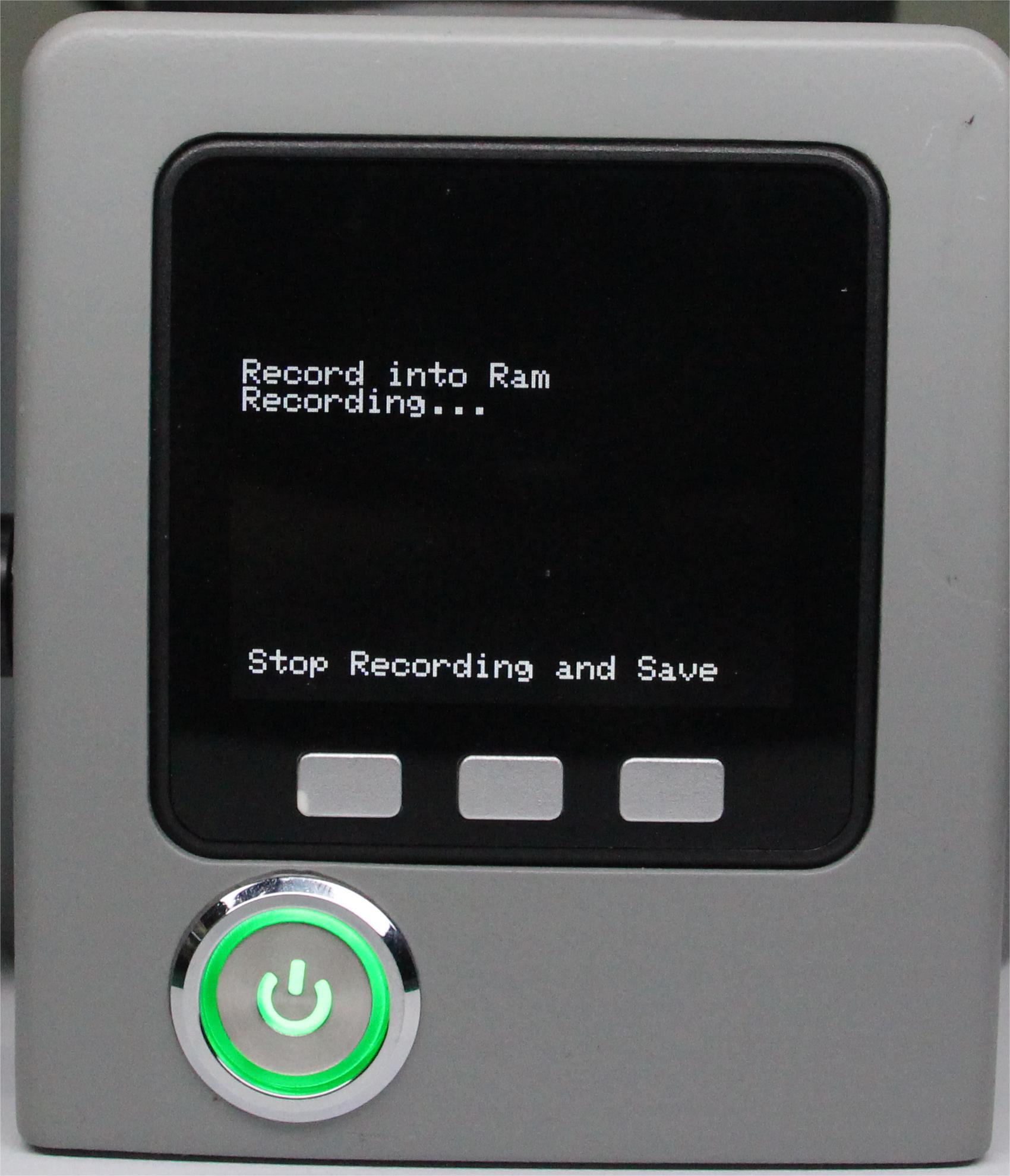 Step 5: Press any key to stop recording and save the record.
Step 5: Press any key to stop recording and save the record.
Step 6: Press the play button Play.
 Step 7: Press Ram and the robotic arm will start playing the saved recording.
Step 7: Press Ram and the robotic arm will start playing the saved recording.

Step 8: Press Pause to pause, Stop to stop, Play to resume.
Step 9: Click Exit to exit this feature.
← Previous page | Next page →
拖动示教
机器人拖动示教是指操作者可以直接拖动机器人的关节,使其做出理想的姿势,然后进行相应的记录。
cobot 是较早具备这一功能的系统。这种示教方式避免了传统示教的各种弊端,是机器人应用的一项前瞻性技术。
在本章中,我们将教你如何轻松上手,体验 cobot 拖动教学的乐趣。
它们的大致步骤如下:
Step 1:选中Maincontrol点击OK进入拖动示教界面。
Step 2: 按下录制按钮Record。
Step 3: 选择储存路径,按下Ram。
Step 4: 拖动机械臂各关节,移动至您预想的位置,完成一组运动。
Step 5: 按下任意键停止录制,保存记录。
Step 6: 按下播放按钮Play。
Step 7: 按下Ram,机械臂开始播放已保存的记录。
Step 8: 按下Pause可暂停运动,按下Stop可停止运动,按下Play可恢复运动。
Step 9: 点击Exit退出此功能。
2350f0e86e2352fe2e8fb62592247280afec2c2d