通信和信息命令
TRACER 移动底盘针对⽤户的开发提供了 CAN 的接⼝,⽤户可选择其中⼀种接⼝对⻋体进⾏指 令控制。
CAN接口协议
TRACER产品中 CAN 通信标准采⽤的是 CAN2.0B 标准,通讯波特率为 500K,报⽂格式采 ⽤ MOTOROLA 格式。通过外部 CAN总线接⼝可以控制底盘的移动的线速度以及旋转的⻆速 度;TRACER会实时反馈当前的运动状态信息以及 TRACER 底盘的状态信息等。协议包含系统状态回馈帧、运动控制回馈帧、控制帧,查询配置帧。
1 系统状态回馈帧
系统状态回馈指令包含了当前⻋体状态回馈、控制模式状态回馈、电池电压回馈以及故障回 馈,协议内容如表所示。

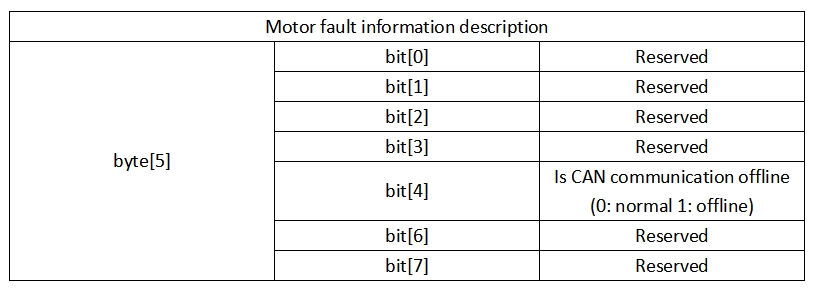
2 故障信息说明
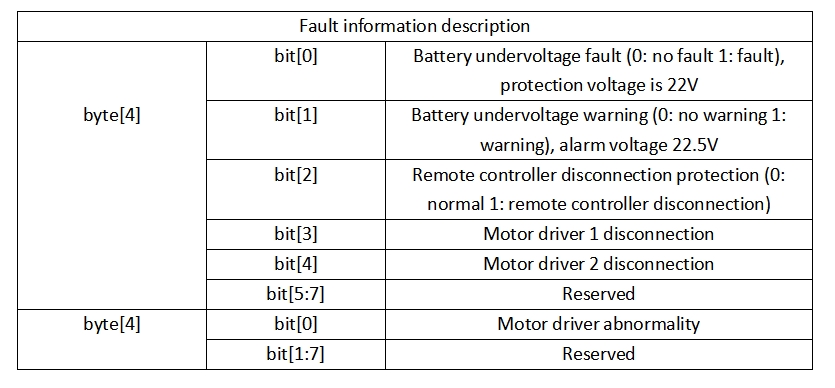
3 运动控制回馈帧
运动控制回馈帧指令包含了当前⻋体的运动线速度、运动⻆速度回馈,协议具体内容如表:
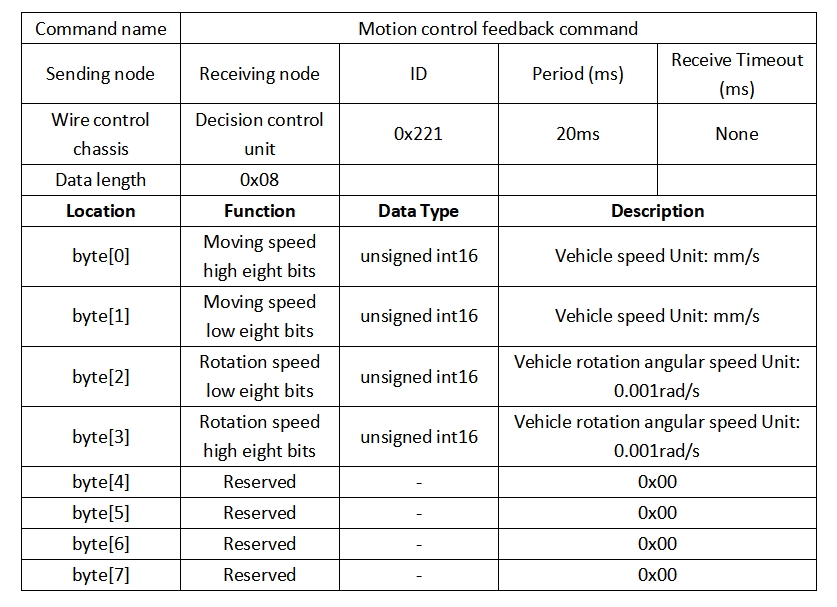
4 指令控制帧
控制帧包含了线速度控制开度、⻆速度控制开度,其具体协议内容如表:
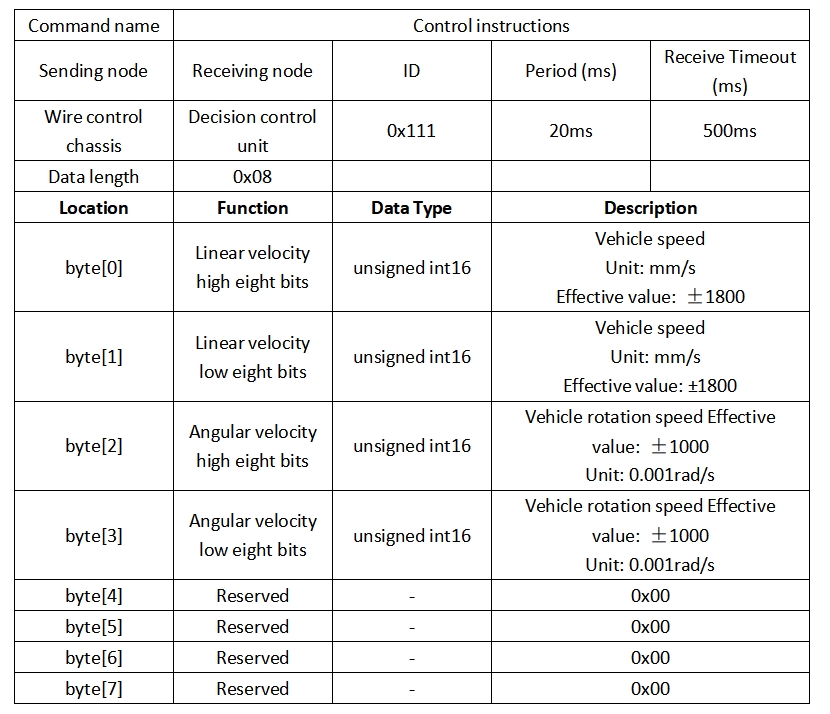
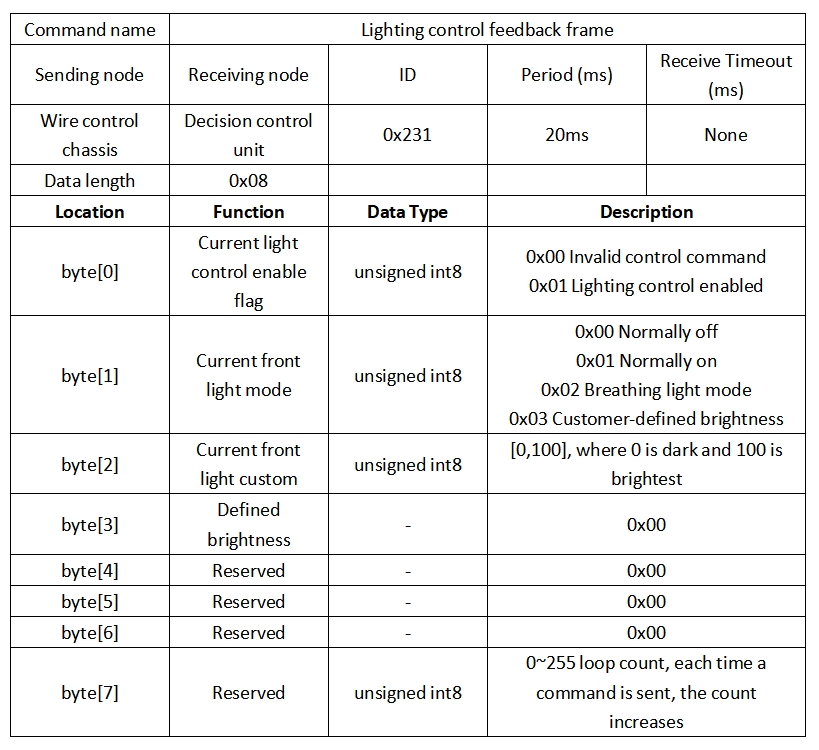
5 灯光控制指令帧
灯光控制回馈帧指令包含了当前前向灯光状态的反馈 具体内容如表:
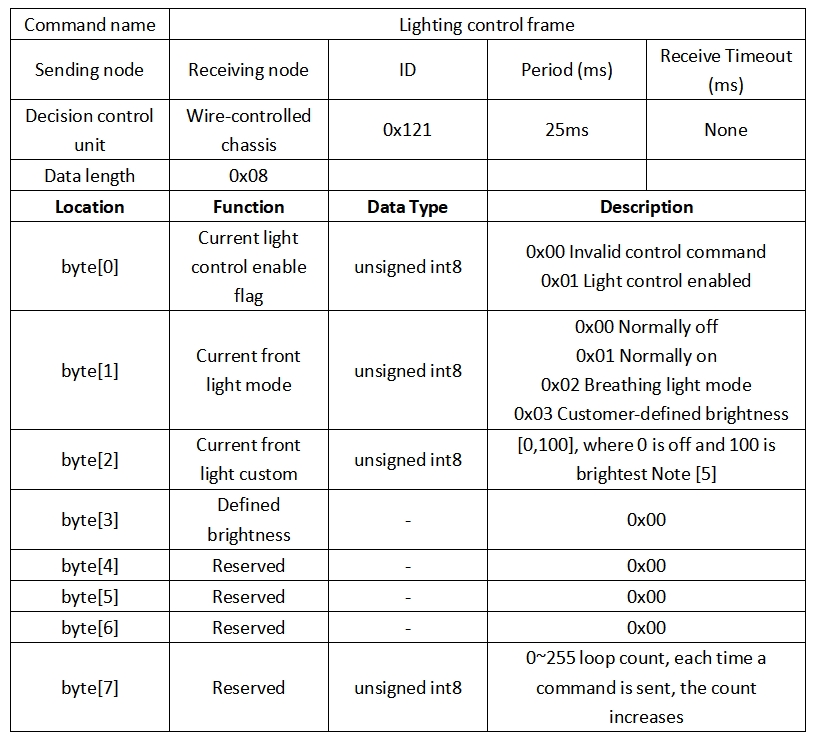
注[5]: 此值自在⾃定义模式下有效
6 灯光控制反馈帧
灯光控制帧指令包含了灯光控制的模式和开度 具体内容如表:
7 控制模式帧
控制模式帧包⽤于设定底盘的控制⽅式,具体如表:
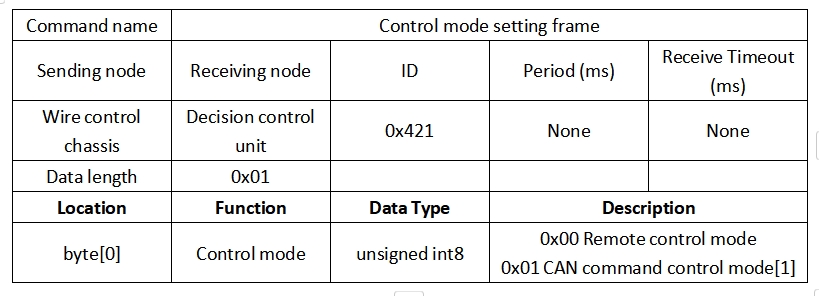
- 注 [1]控制模式说明 默认是待机模式,需要切换到指令模式才能发送运动控制指令。若打开遥控器,遥控器拥有最⾼权限,可以屏蔽指令的控制。当遥控器切换到指令模式时,还是需要先发送控制模式设定指令才能响应速度指令。
8 状态位置帧
状态置位帧包⽤于清除错误信息:

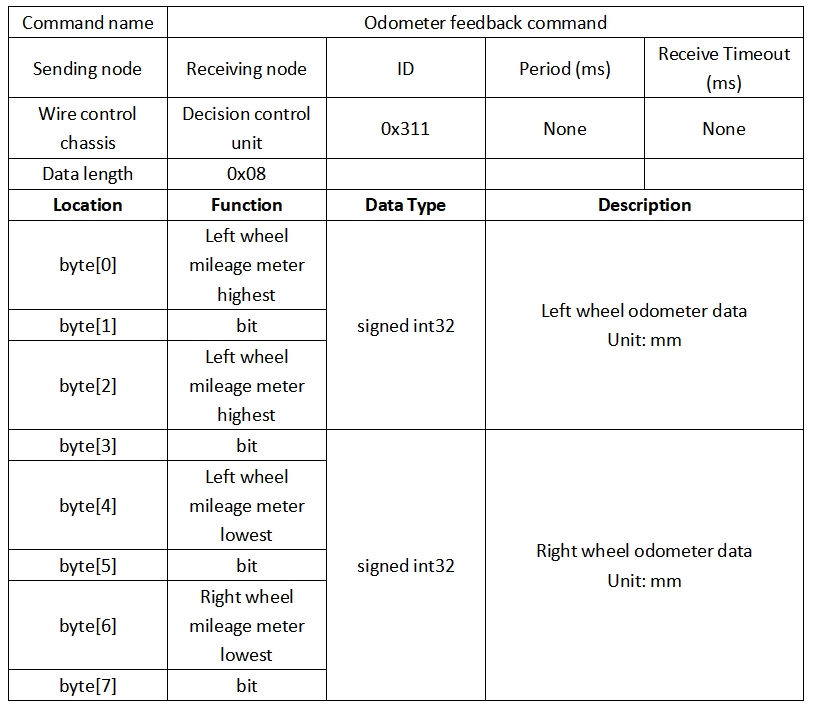
9 里程计反馈帧
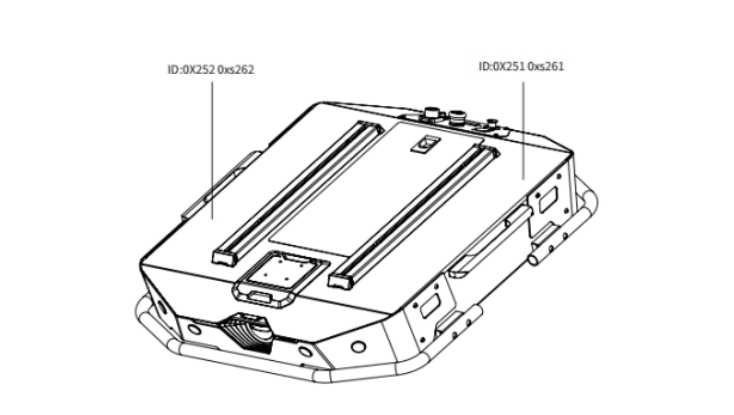
10 电机信息反馈帧
除了底盘的状态信息会进⾏反馈以外,底盘反馈的信息还包括电机信息。下⾯的帧反馈是电机信息反馈:在底盘中两个电机电机编号对应为如下图所示
- 电机高速信息反馈帧

- 电机低速信息反馈帧

- 电机故障信息说明
CAN指令的实现
正常启动TRACER移动机器⼈底盘,打开FS遥控器,然后将控制模式切换⾄指令控制,即将FS遥控器SWB模式选择拨⾄最上⽅,此时TRACER底盘会接受来⾃CAN接⼝的指令,同时主机也可以通过CAN总线回馈的实时数据,解析当前底盘的状态,具体协议内容参考CAN通讯协议。