1. CAN总线连接
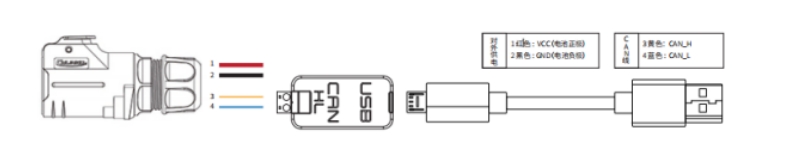
- 将TRACER顶部航空插头或者尾部插头CAN线引出,将CAN线中的CAN_H和CAN_L分别CAN_TO_USB适配器相连;
- 打开TRACER移动机器⼈底盘旋钮开关,检查来两侧的急停开关是否释放;
- 将CAN_TO_USB连接⾄笔记本的usb口。连接示意如图所示。
2. 开启Tracer小车底盘节点
- 为确保CAN总线使能,每次打开电源、系统重启都需要运行此命令:
rosrun tracer_bringup setup_can2usb.bash
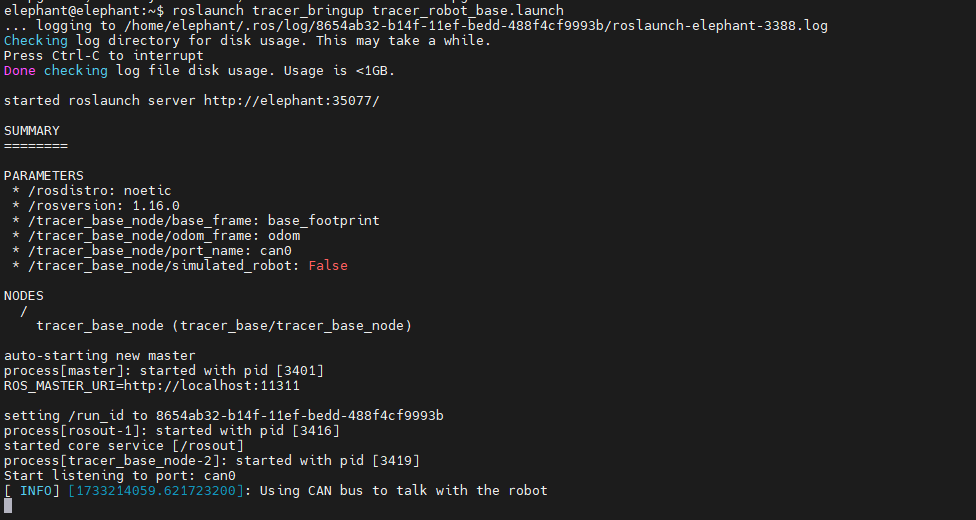
- 启动底盘小车ROS节点:
roslaunch tracer_bringup tracer_robot_base.launch
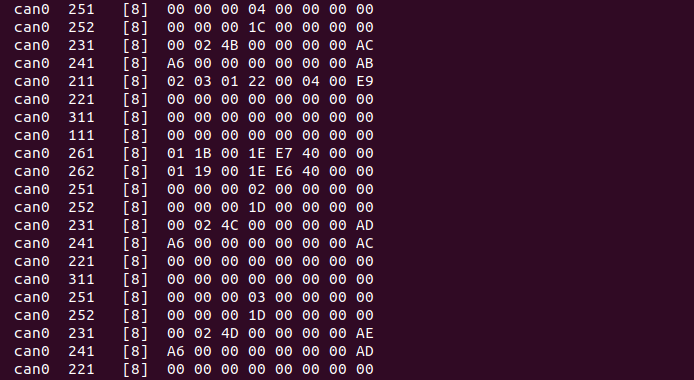
如果已经将can-to-usb连接到TRACER机器人,并且小车已经开机、CAN总线已经使能、底盘节点已经开启,使用以下命令监控TRACER底盘的数据
candump can0
若底盘数据正常,终端会一直输出如下数据:
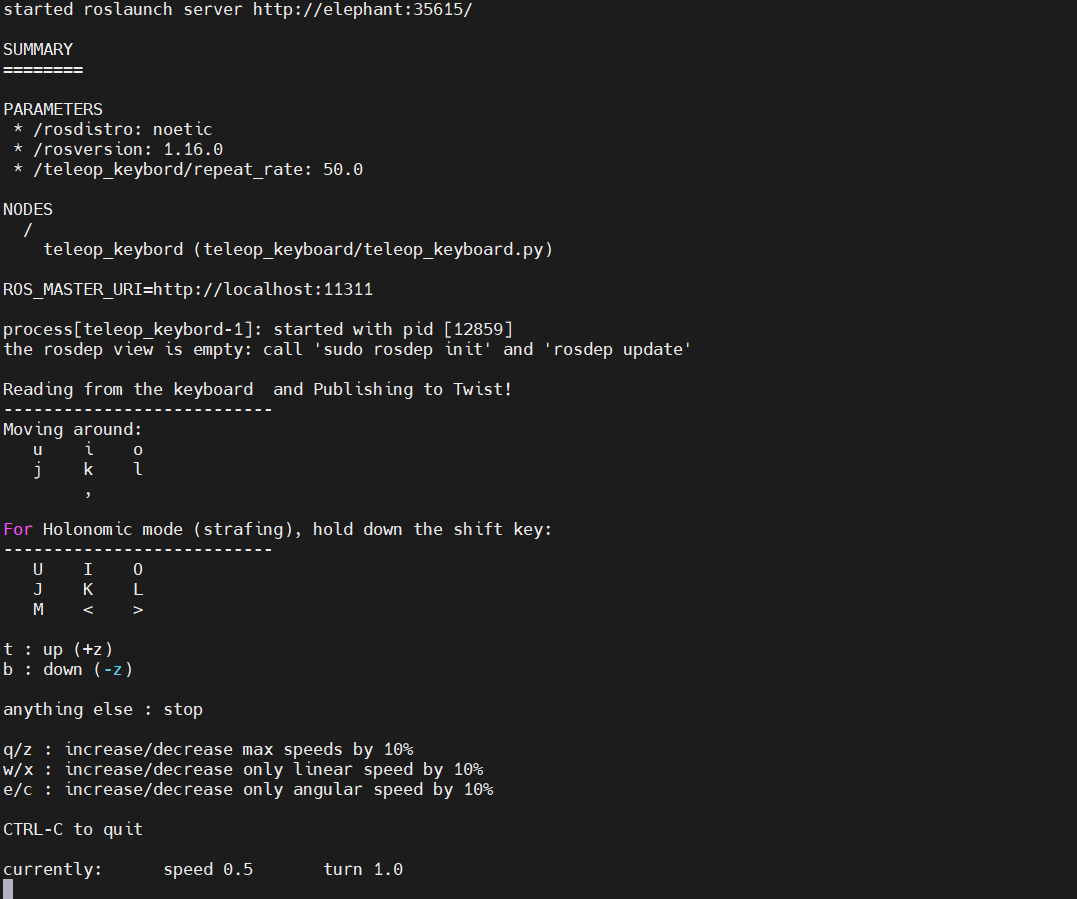
3. 启动键盘控制节点
打开一个终端,输入以下命令:
roslaunch tracer_bringup tracer_teleop_keyboard.launch
| 按键 | 说明 |
|---|---|
| i | 向前移动 |
| , | 向后移动 |
| u | 逆时针旋转 |
| o | 顺时针旋转 |
| k | 停止 |
| q | 提高线速度和角速度 |
| z | 降低线速度和角速度 |
| w | 提高线速度 |
| x | 降低线速度 |
| e | 增加角速度 |
| c | 降低角速度 |
现在,小车可以在键盘控制下开始移动。