<<<<<<< HEAD
Tracer Car Remote Control Function
1. Remote Control Description
The TRACER universal robot chassis can be easily controlled using the remote control. Its definition and functions are as follows:

The function of the button is defined as: SWA and SWD are temporarily not enabled, SWB is the control mode selection button, dialed to the top for command control mode, dialed to the middle for remote control mode; SWC is the light control button; S1 is the throttle button, which controls the forward and reverse movement of the TRACER; S2 controls rotation, and POWER is the power button, which can be turned on and off by pressing and holding them at the same time.
Remote control interface description:
| Parameter | Description |
|---|---|
| Tracer | Vehicle type |
| Vol | Battery voltage |
| Car | Chassis status |
| Batt | Chassis power percentage |
| P | Parking |
| Remoter | Remote control power |
| Fault Code | Error message |
2. Control instructions and motion instructions
We establish the coordinate reference system of the ground moving vehicle according to the ISO 8855 standard as follows:
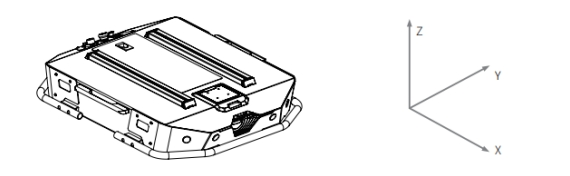
The TRACER car body is parallel to the X axis of the established reference coordinate system.
In the remote control mode, the remote control joystick S1 moves forward to move in the positive X direction, and S1 moves backward to move in the negative X direction. When S1 is pushed to the maximum value, the speed of movement in the positive X direction is the maximum, and when S1 is pushed to the minimum value, the speed of movement in the negative X direction is the maximum; the remote control joystick S2 controls the rotation of the car body left and right. When S2 is pushed to the left, the car body rotates from the positive direction of the X axis to the positive direction of the Y axis, and when S2 is pushed to the right, the car body rotates from the positive direction of the X axis to the negative direction of the Y axis. When S2 is pushed to the left to the maximum value, the counterclockwise rotation linear speed is the maximum, and when S2 is pushed to the right to the maximum value, the clockwise rotation linear speed is the maximum.
In control command mode, a positive linear velocity indicates movement in the positive direction of the X axis, and a negative linear velocity indicates movement in the negative direction of the X axis; a positive angular velocity indicates movement from the positive direction of the X axis to the positive direction of the Y axis, and a negative angular velocity indicates movement from the positive direction of the X axis to the negative direction of the Y axis.
Note: When using the remote control joystick for operation, push the joystick slowly and gently to avoid too fast speed. When there is a load on the top of the car, too fast speed is prone to unstable center of gravity, affecting the stability of motion control.
3. Use and operation
Inspect
Check the vehicle status. Check if there is any obvious abnormality in the vehicle; if so, please contact after-sales support.
Shutdown operation
Turn the knob switch to cut off the power supply.
Start
Emergency stop switch status. Confirm that the emergency stop buttons are all in the released state;
Rotate the knob switch. Under normal circumstances, the voltmeter displays the battery voltage normally and the headlights light up normally.
Emergency stop
Press the emergency stop switches on the left and right tails of the vehicle.
Basic operation flow of remote control
Start the TRACER normally After moving the machine chassis, start the remote control and select the control mode as the remote control mode, and then you can control the movement of the TRACER platform through remote control.
← Previous section | Next Chapter →
Tracer 小车遥控功能
1. 遥控器说明
使⽤遥控器可以轻松控制TRACER通⽤机器⼈底盘,其定义及其功能如下:
按键的功能定义为: SWA、SWD 暂时未被启用,其中 SWB 为控制模式选择按钮,拨⾄最 上⽅为指令控制模式,拨⾄中间为遥控控制模式;SWC 为灯光控制按钮;S1 为油门按钮,控 制TRACER前进和后退;S2 控制旋转,POWER为电源按钮,同时按住即可开关机 。
遥控界⾯说明:
| 参数 | 说明 |
|---|---|
| Tracer | ⻋型 |
| Vol | 电池电压 |
| Car | 底盘状态 |
| Batt | 底盘电量百分比 |
| P | 驻车 |
| Remoter | 遥控器电量 |
| Fault Code | 错误信息 |
2. 控制指令与运动说明
我们将地⾯移动⻋辆根据 ISO 8855 标准建立坐标参考系,如下:
TRACER 车体与建立的参考坐标系 X 轴为平⾏状态。
在 遥控器控制模式下,遥控器摇杆S1往前推动则为往 X 正方向运动,S1 往后推动则往 X 负方向运动,S1 推动至最⼤值时,往X正方向运动速度最⼤,S1推动⾄最小值时,往 X 负方向运动速度最大;遥控器摇杆S2 左右控制⻋体的旋转运动,S2往左推动⻋体则由 X 轴正方向往 Y 正方向旋转,S2往右推动⻋体则由 X 轴正方向往 Y 负方向旋转,S2往左推动⾄最⼤值时,逆时针方向旋转线速度最⼤,S2往右推动⾄最⼤值时,顺时针旋转线运动速度⼤。
在 控制指令模式下,线速度的正值表示往X轴正方向运动,线速度的负值表示往X轴负⽅向运动;⻆速度的正值表示⻋体由X轴正方向往 Y 轴正⽅向运动,⻆速度的负值表示⻋体由 X 轴正⽅向往Y轴负⽅向运动。
注意:使用遥控器摇杆进行操作时,需缓慢轻推摇杆,避免速度过快。当小车顶部有载重时,速度过快容易出现重心不稳,影响运动控制的平稳性。
3. 使用与操作
检查
检查⻋体状态。检查⻋体是否有明显异常;如有,请联系售后⽀持。
关闭操作
旋转旋钮开关,即可切断电源。
启动
- 急停开关状态。确认急停按钮均处于释放状态;
- 旋转旋钮开关,正常情况下,电压表正常显示电池电压,前灯正常亮起。
急停
按下⻋体左右尾部的急停开关即可。
遥控控制基本操作流程
正常启动 TRACER 移动机器底盘后,启动遥控器,将控制模式选择为遥控控制模式,即可通过遥KO控控制 TRACER平台运动。
2350f0e86e2352fe2e8fb62592247280afec2c2d