C650 control M750 program case
Program address
https://github.com/elephantrobotics/pymycobot/tree/main/demo/myArm_M%26C_demo_v1.1
Installation dependency
pip install -r requirement.txt
Run program
python main.py
Program instruction
The serial port is opened in the following order: first open the serial port connection of myArmM, then open the serial port connection of myArmC.
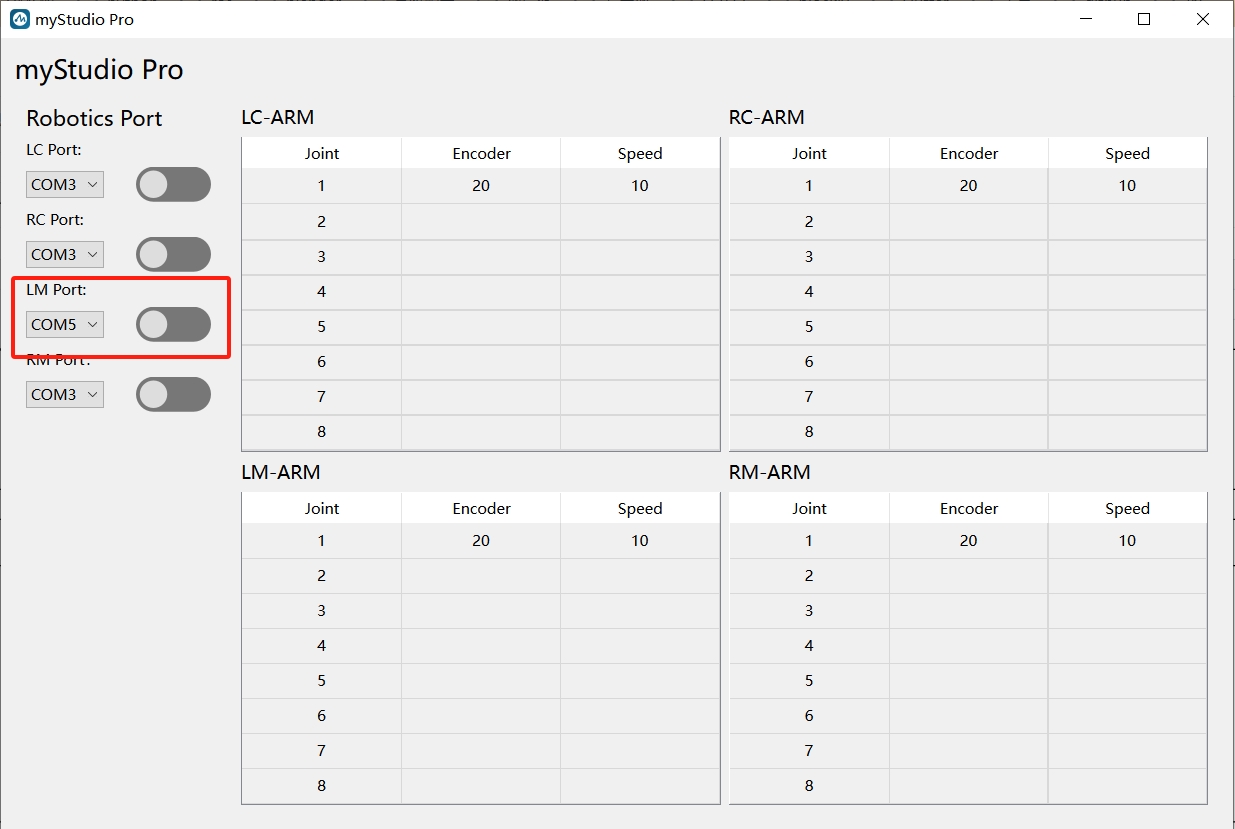

When both serial ports are open, you can control myArmM movement by moving myArmC.