<<<<<<< HEAD
Communication forwarding
This chapter describes how to use the extended development capabilities of the built-in software. This feature allows you to expand the connectivity options of your devices and supports different development environments and methods.
Currently, there are three connection methods supported for communication forwarding: USB, Wi-Fi, and Bluetooth. They are suitable for different functional development scenarios.
- USB and Wi-Fi are used to connect to other master devices, and the robot can be controlled to execute the corresponding commands through the robot communication protocol.
- Bluetooth is used to connect to mobile control software, which can be controlled quickly by mobile phone.
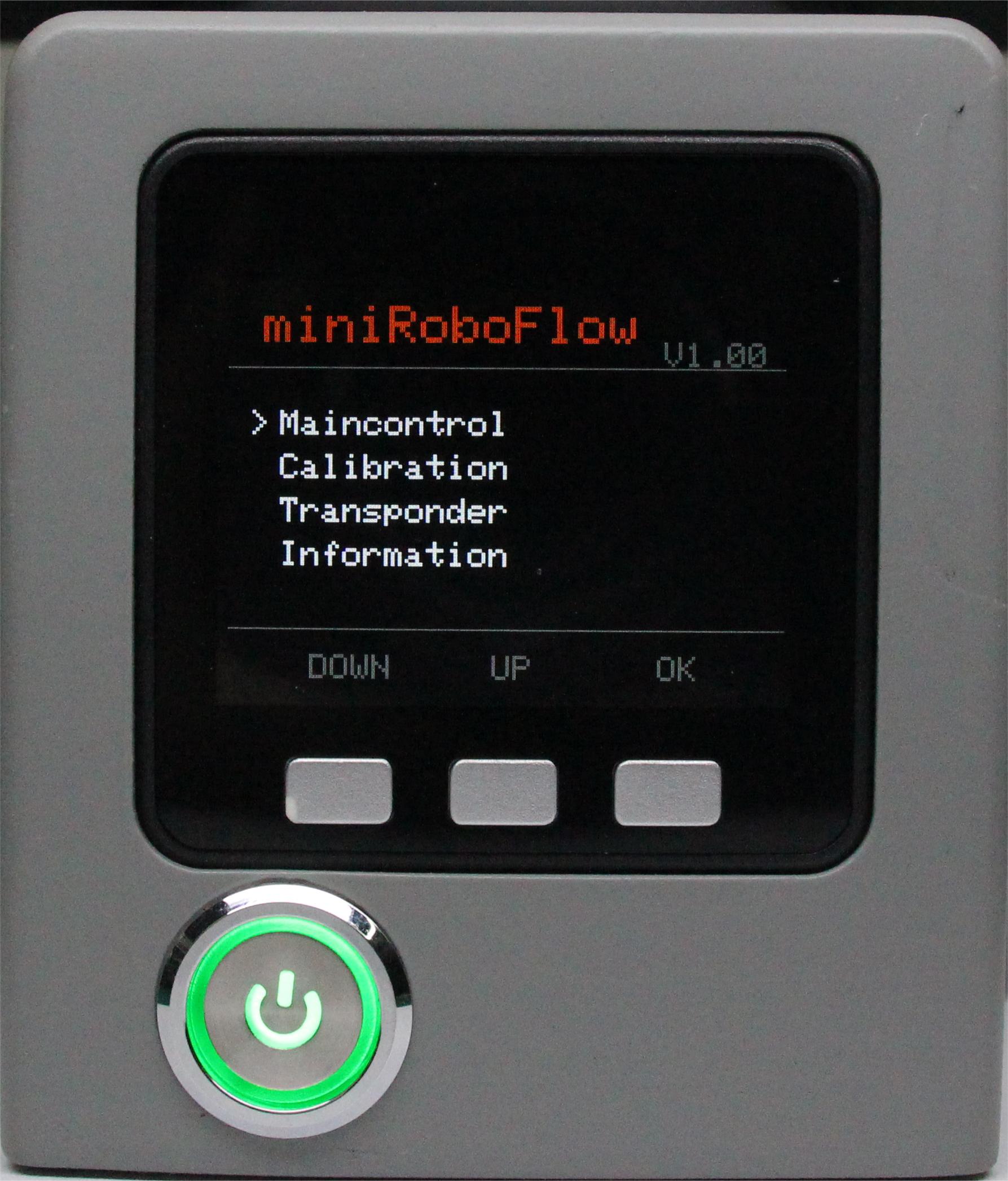
- Step 1: Confirm that Type-C is correctly connected to your device, select Transponder and click OK to enter the communication forwarding interface.
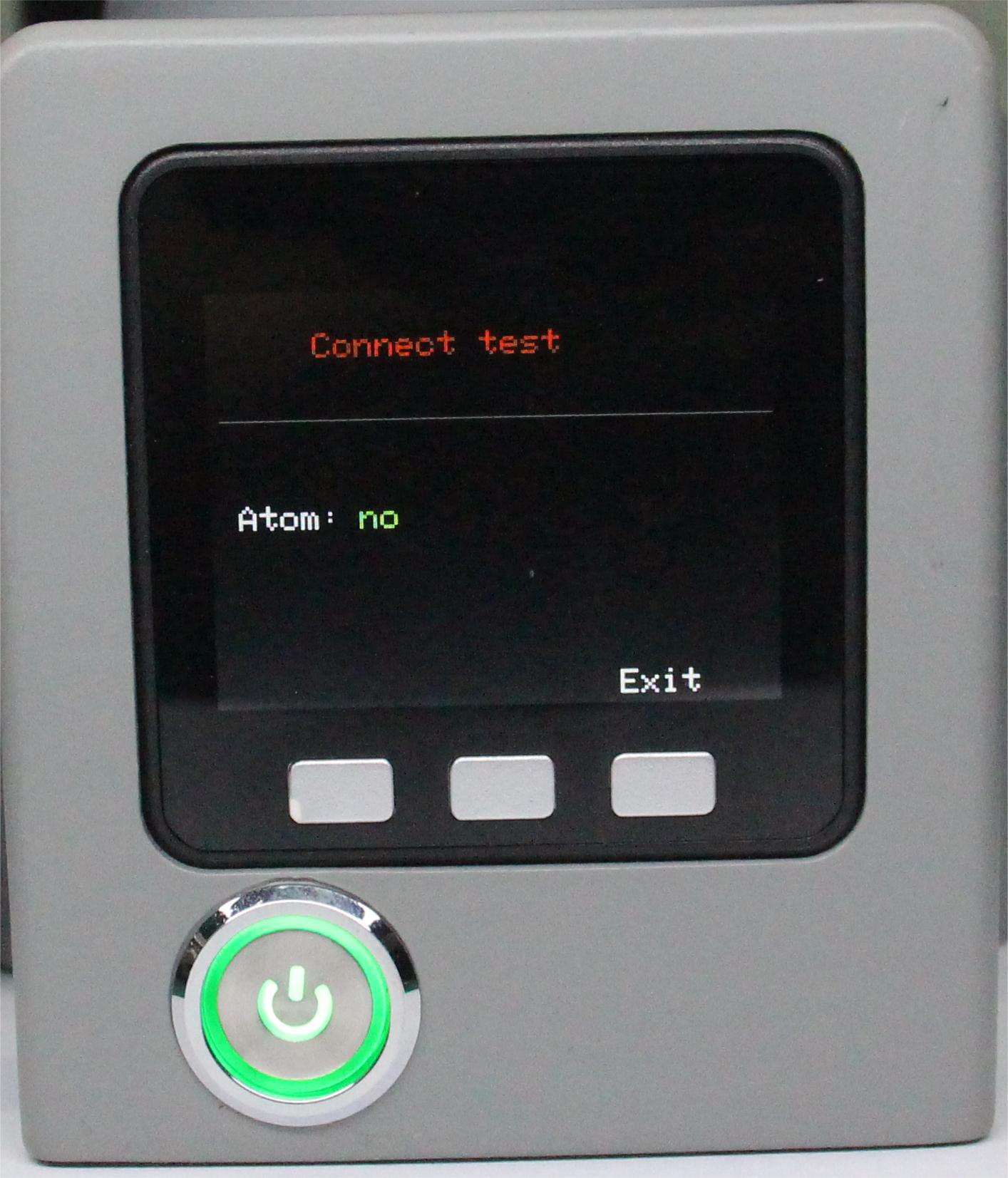
 Step 2: Use the serial port connection, select the USB UART and click OK to enter the serial port interface. The serial interface detects the connection of the Atom (ok indicates that the connection is normal, otherwise no is displayed).
Step 2: Use the serial port connection, select the USB UART and click OK to enter the serial port interface. The serial interface detects the connection of the Atom (ok indicates that the connection is normal, otherwise no is displayed).
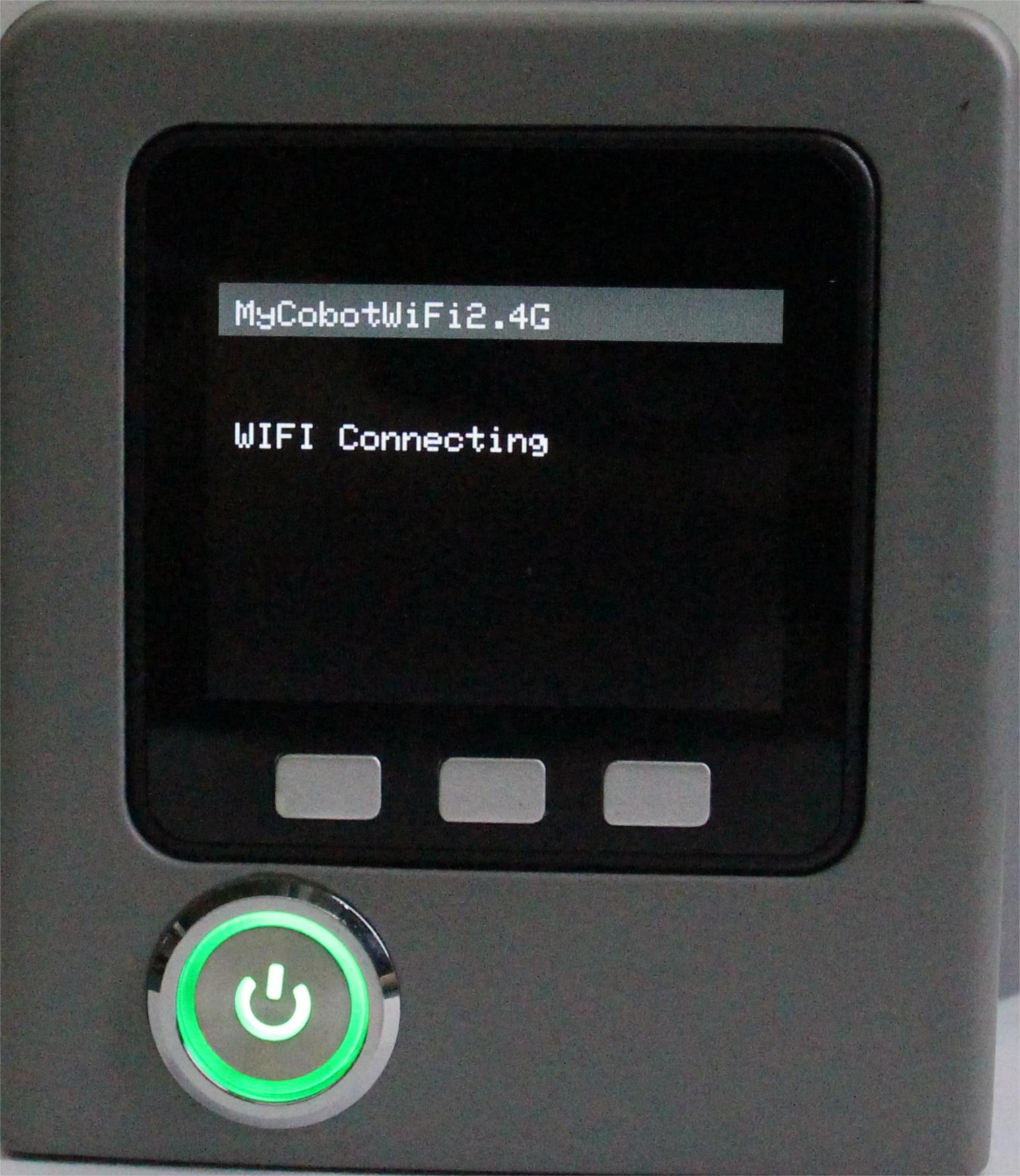
 Step 3: To use the WiFi connection, you need to set the WiFi name to: MyCobotWiFi2.4G and the password to: mycobot123. Select WiFi and click OK to automatically search for WiFi and connect.
Step 3: To use the WiFi connection, you need to set the WiFi name to: MyCobotWiFi2.4G and the password to: mycobot123. Select WiFi and click OK to automatically search for WiFi and connect.
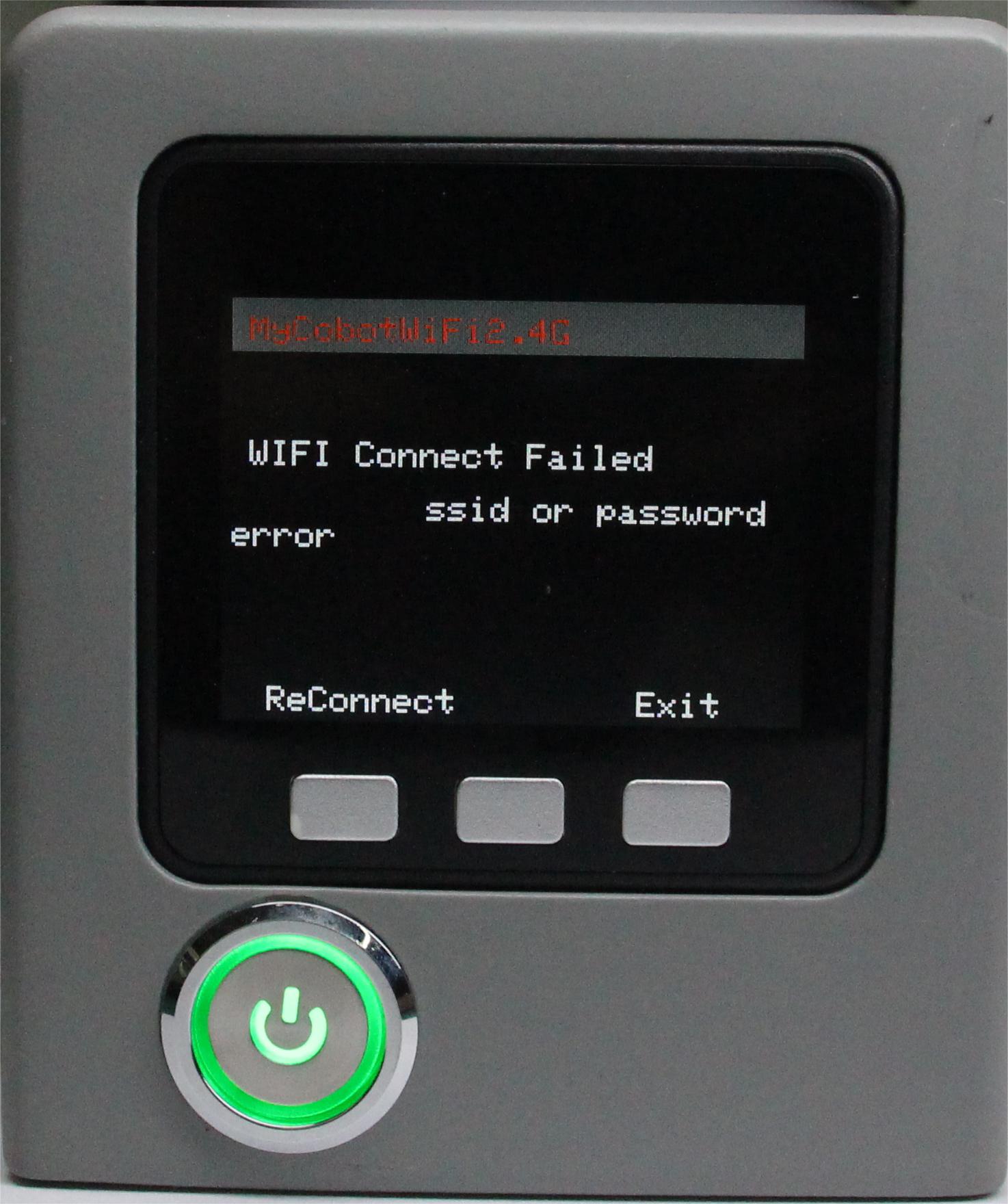 Step 4: Click Exit to exit this feature.
Step 4: Click Exit to exit this feature.
← Previous page | Next page →
通信转发
本章介绍如何使用内置软件的扩展开发功能。该功能允许您扩展设备的连接选项,并支持不同的开发环境和方法。
目前,通信转发支持三种连接方式:USB、Wi-Fi 和蓝牙。它们适用于不同的功能开发场景。
- USB 和 Wi-Fi 用于连接其他主控设备,通过机器人通信协议,可以控制机器人执行相应命令。
- 蓝牙用于连接移动控制软件,可通过手机实现快速移动控制。
Step 1: 确认Type-C正确连接你的设备,选中Transponder点击OK进入通信转发界面。
![]()
Step 2: 使用串口连接,选中USB UART点击OK进入串口界面。串口界面检测Atom的连接(ok表示连接正常,否则显示no)。
Step 3: 使用WiFi连接,需要将WiFi名称设置为:MyCobotWiFi2.4G,密码设置为:mycobot123。选中WiFi点击OK自动搜索WiFi并连接。
![]()
Step 4: 点击Exit退出此功能。
2350f0e86e2352fe2e8fb62592247280afec2c2d