零位校准
默认机器人交付前已执行过此操作。无需重复操作。错误使用此功能可能会损坏机器人。如果您的机器人在无异常情况下工作,请勿使用。感谢您的合作。
校准机械臂是精确控制机械臂的前提,而设置关节零点和初始化电机电位则是后续高级开发的基本工作。
在本章中,我们将教您如何校准机械臂以及测试和验证关节。
Step 1: 选中 Calibration,点击 OK 进入零位校准界面。

Step 2: 按下 A 键 ,开始校准机械臂。
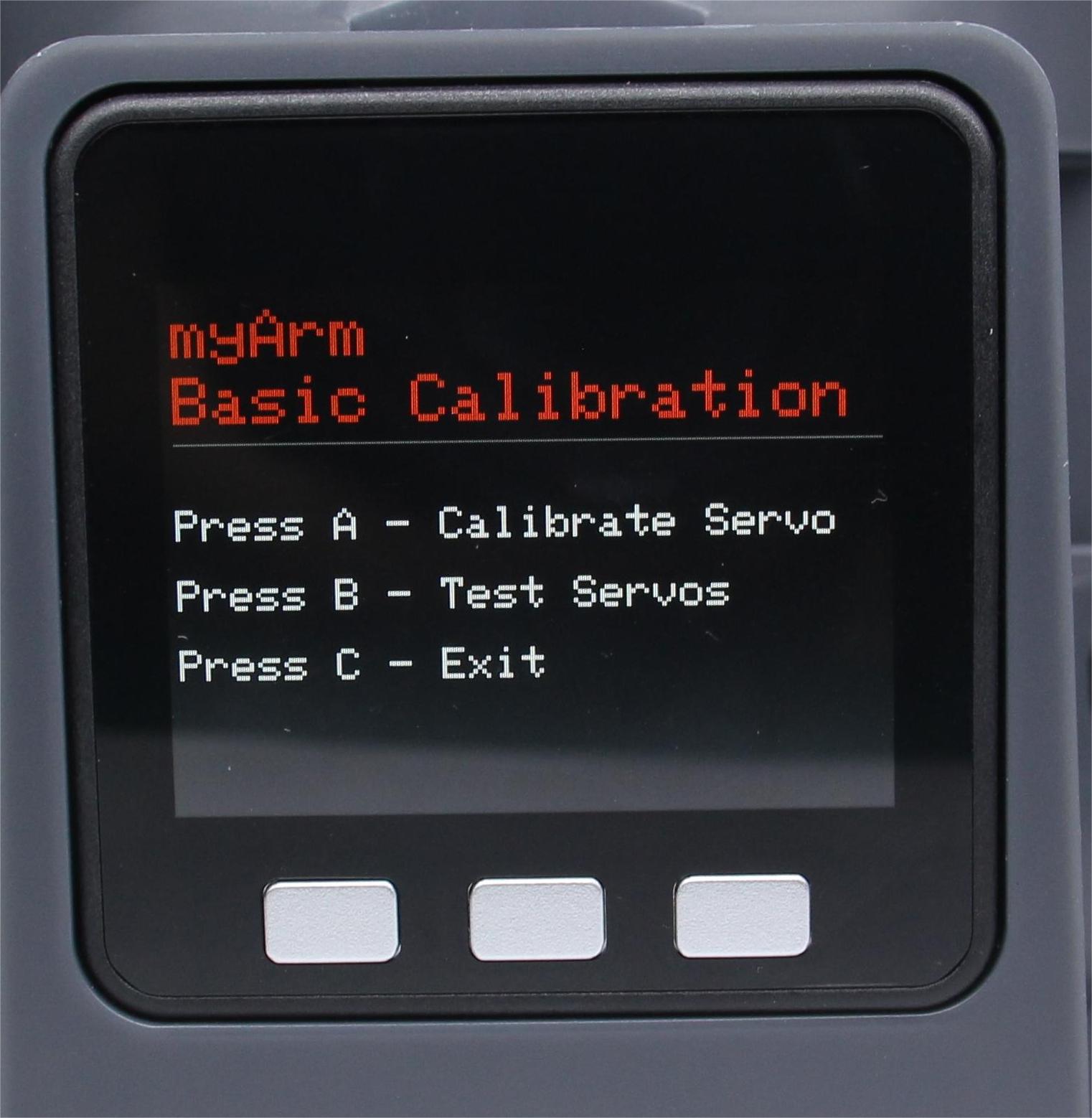
Step 3: 首先拖动机械臂使一号关节到达零位状态(零位刻度线对齐)。

Step 4: 按照屏幕提示的关节序号(1-7),拖动机械臂使每个关节到达零位(零位刻度线对齐)。
Step 5: 依次按下 NEXT,进入下一个电机校准,直至出现 Already Calibrate all!! ,即完成校准。
Step 6: 按下 EXIT ,可退出校准。
注意:校准成功后,将显示各关节的当前角度。零点位置的正确角度信息是关节2为10°,关节3为-10°,所有其他关节为0°。