一、仿真
我们提供一些 静态仿真 和 动态仿真, 用以和 MyarmC650 交互。
1.1 静态仿真
这里的静态仿真是指:用rviz中的滑动模块与仿真中的MyarmC650交互
在工作空间打开终端命令行中输入:
roscore
再新建一个终端输入:
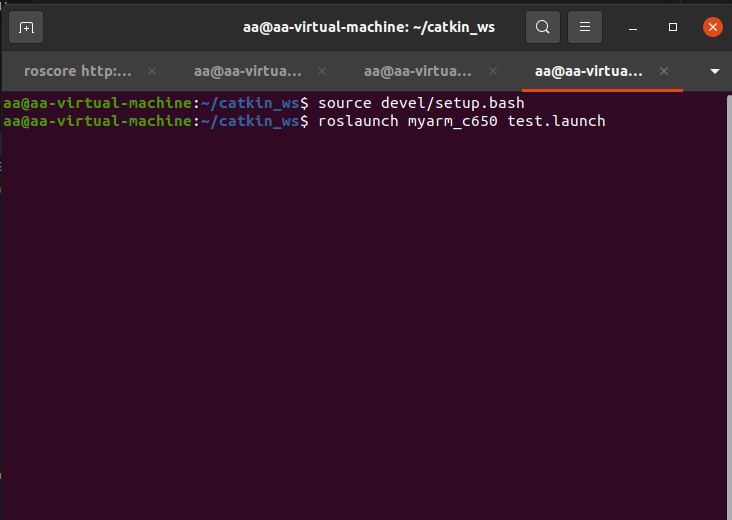
source devel/setup.bash # 添加环境变量
roslaunch myarm_c650 test.launch

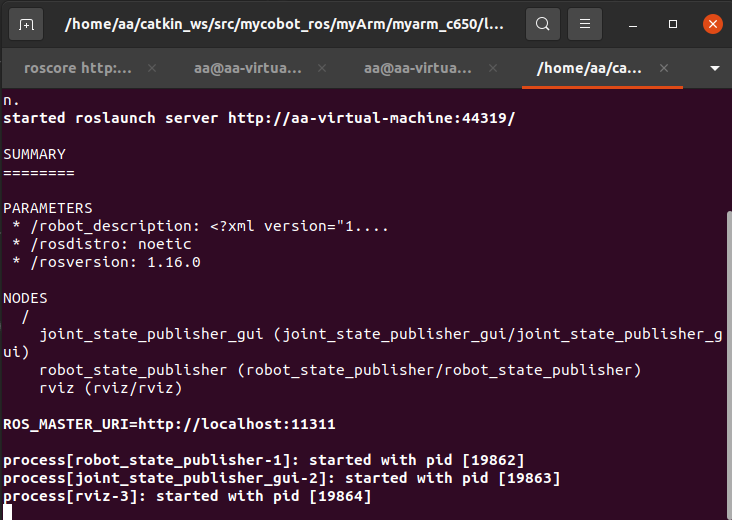
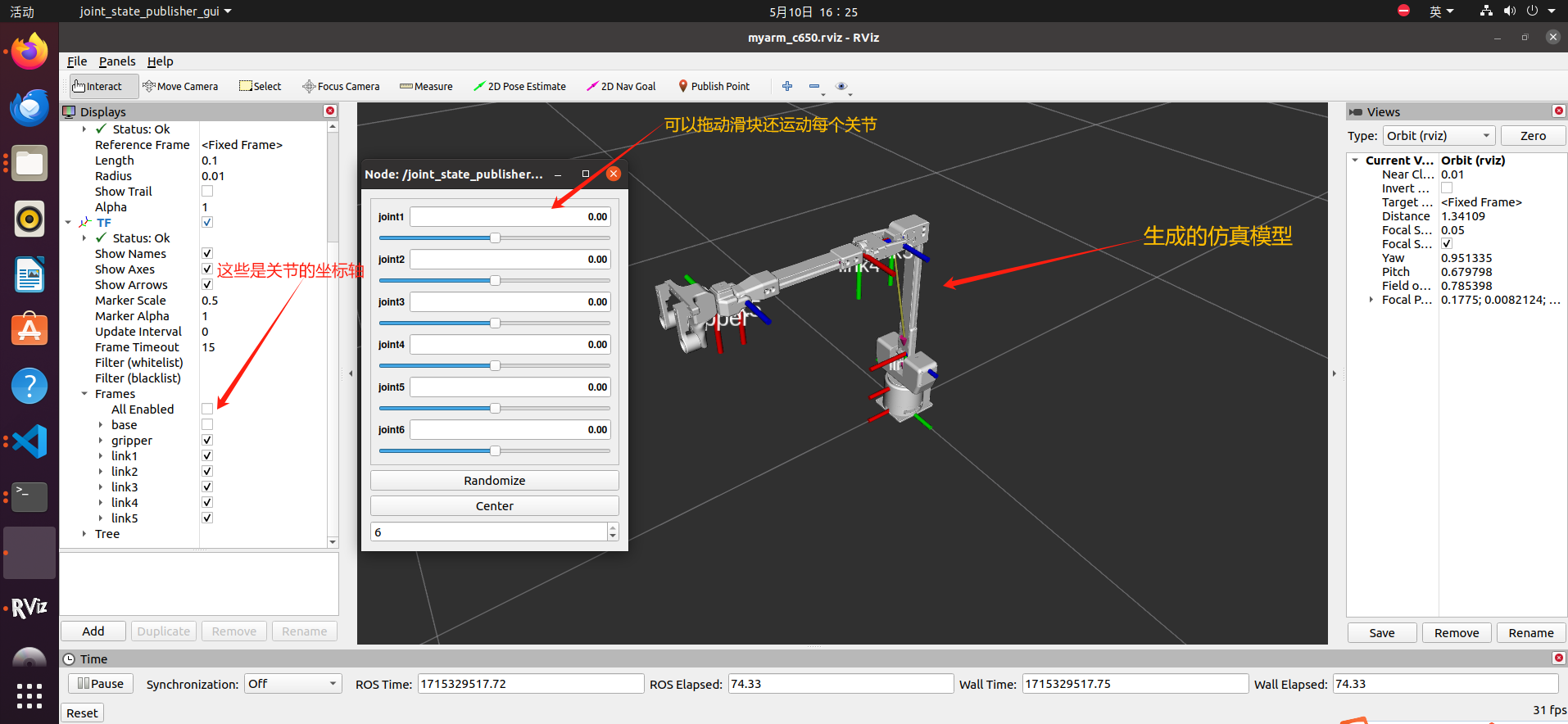
成功运行launch文件后,终端会显示:
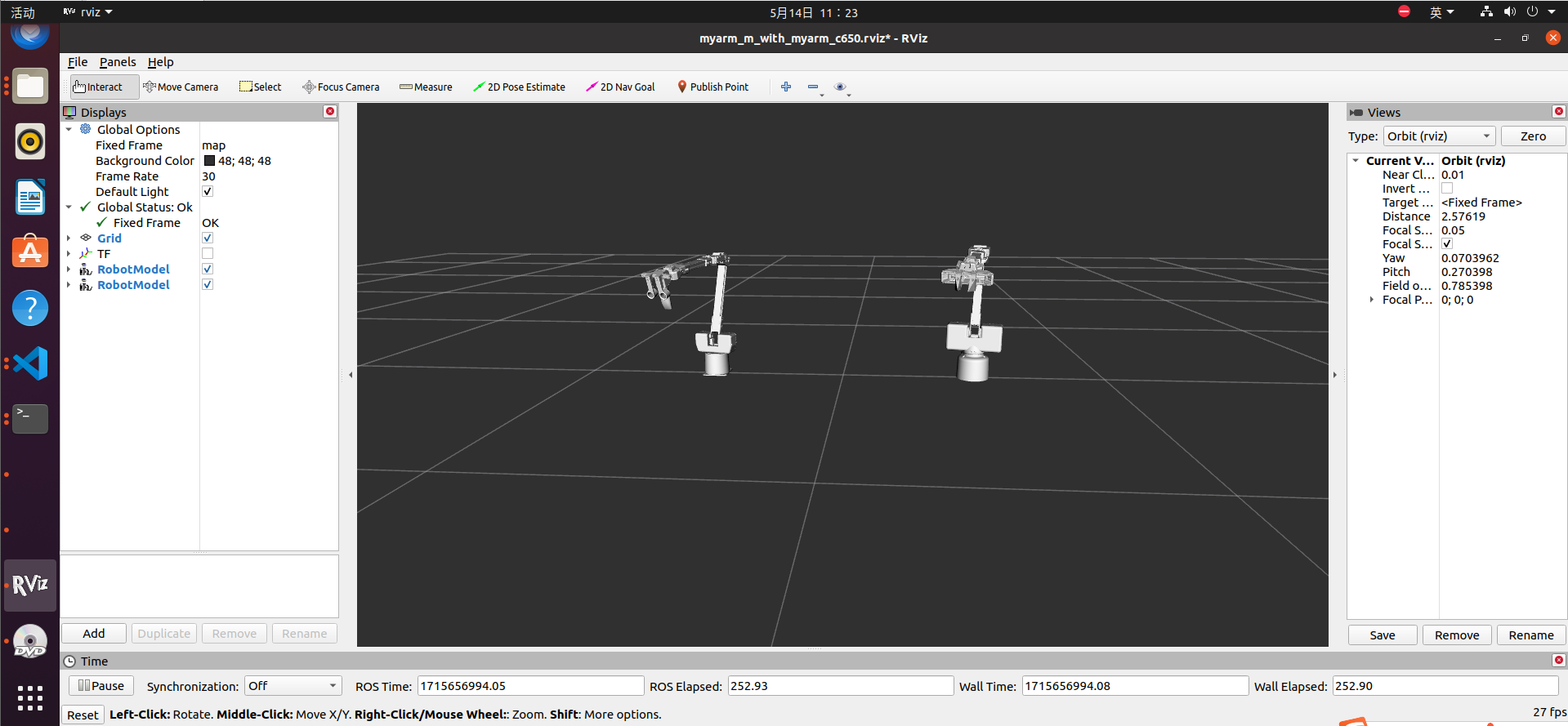
同时会打开rviz,生成MyarmC650的仿真模型
1.2 动态仿真
这里的动态仿真是指:运动现实中的MyarmC650与仿真中的MyarmC650交互
首先我们需要将MyarmC650机械臂通过USB转typeC线连接到我们的电脑上,并给其通电
通过按钮选中 Transponder 再按“OK”按钮
然后屏幕会显示
我们可以看到箭头指向 “USB UART” ,再按“OK”按钮,进入之后会显示 “NO”,再按 “Exit” 按钮,回到箭头指向 “USB UART” ,再按“OK”按钮,这时会显示 “OK”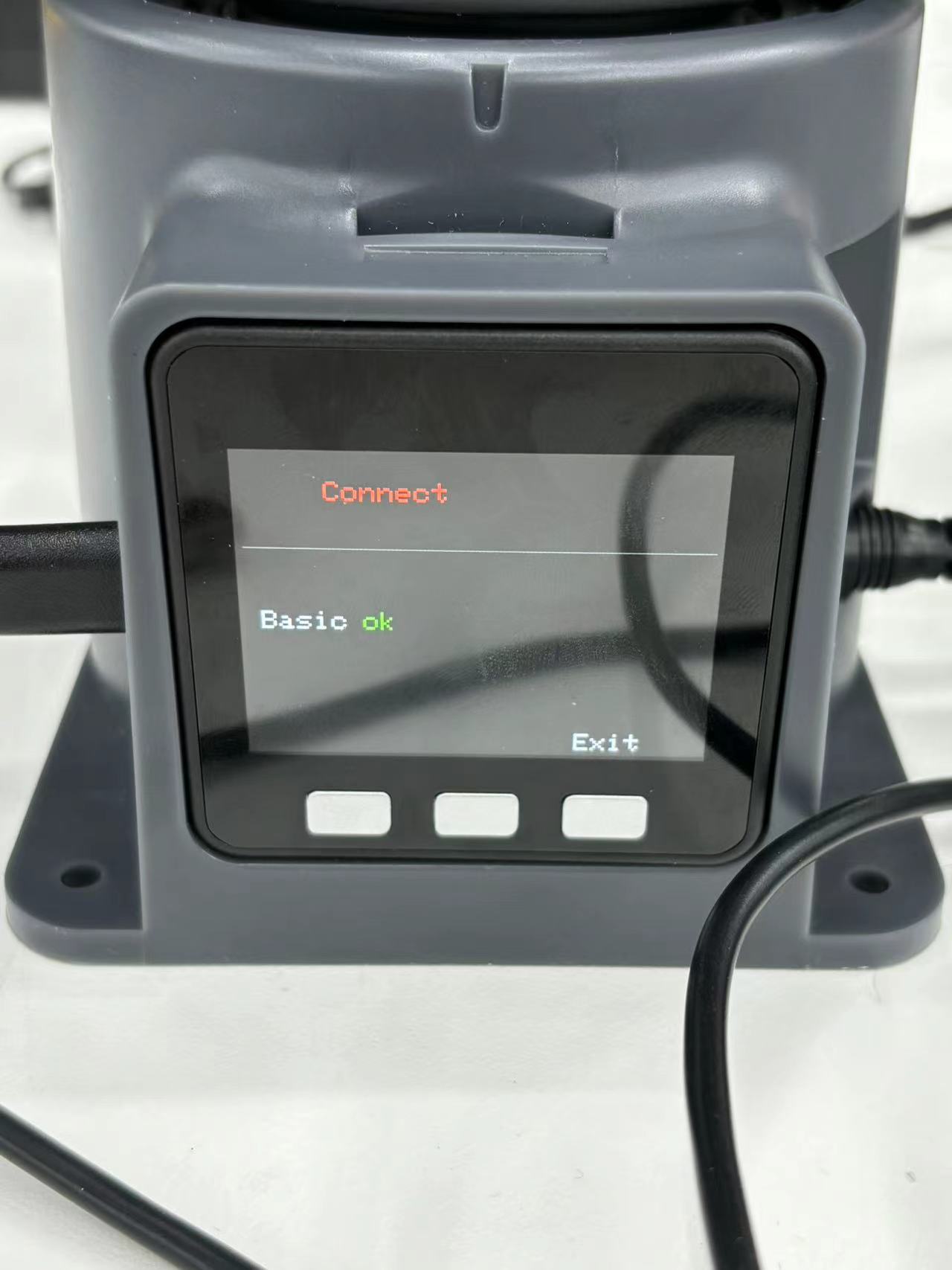
这时我们的MyarmC650已经成功连接上电脑
接下来在工作空间打开终端命令行中输入:
source devel/setup.bash # 添加环境变量
roslaunch myarm_c650 test.launch
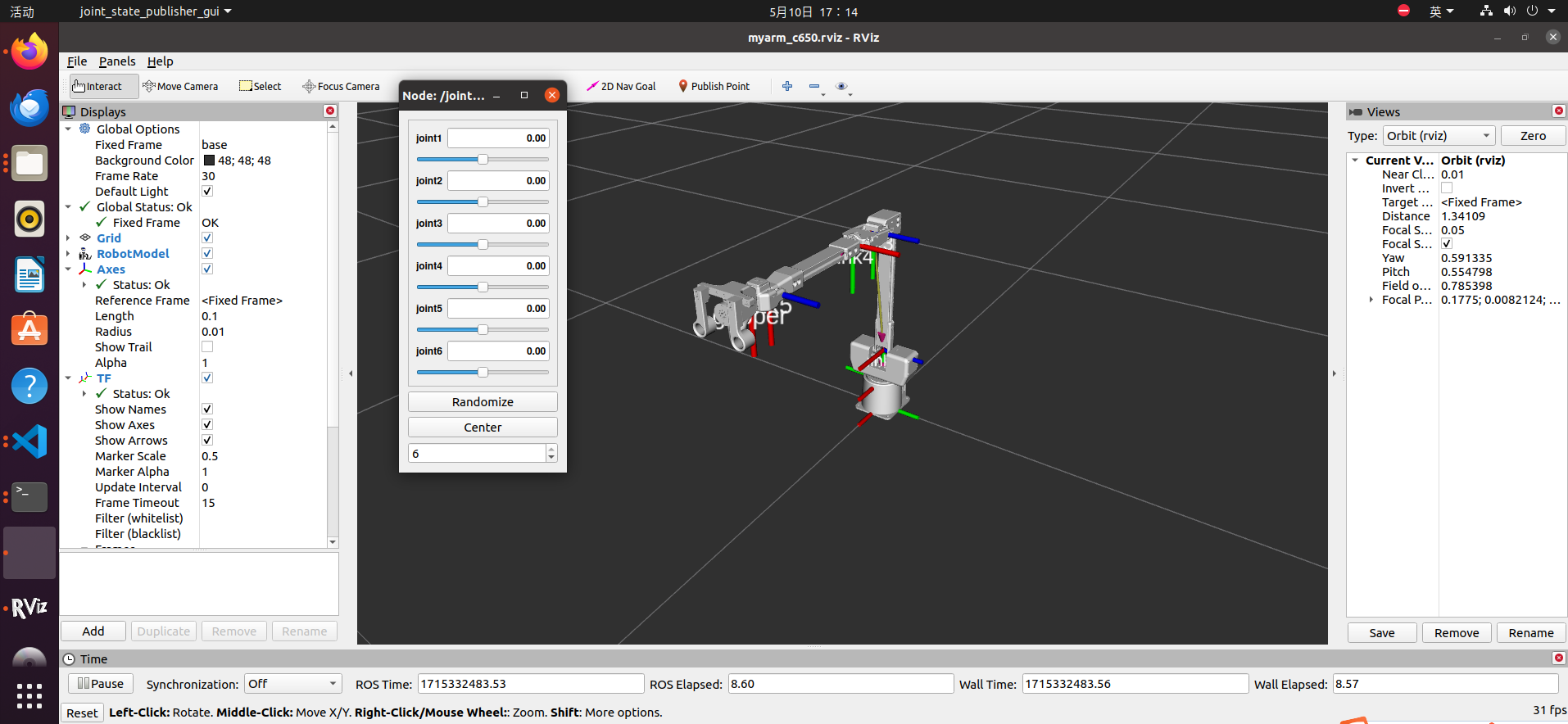
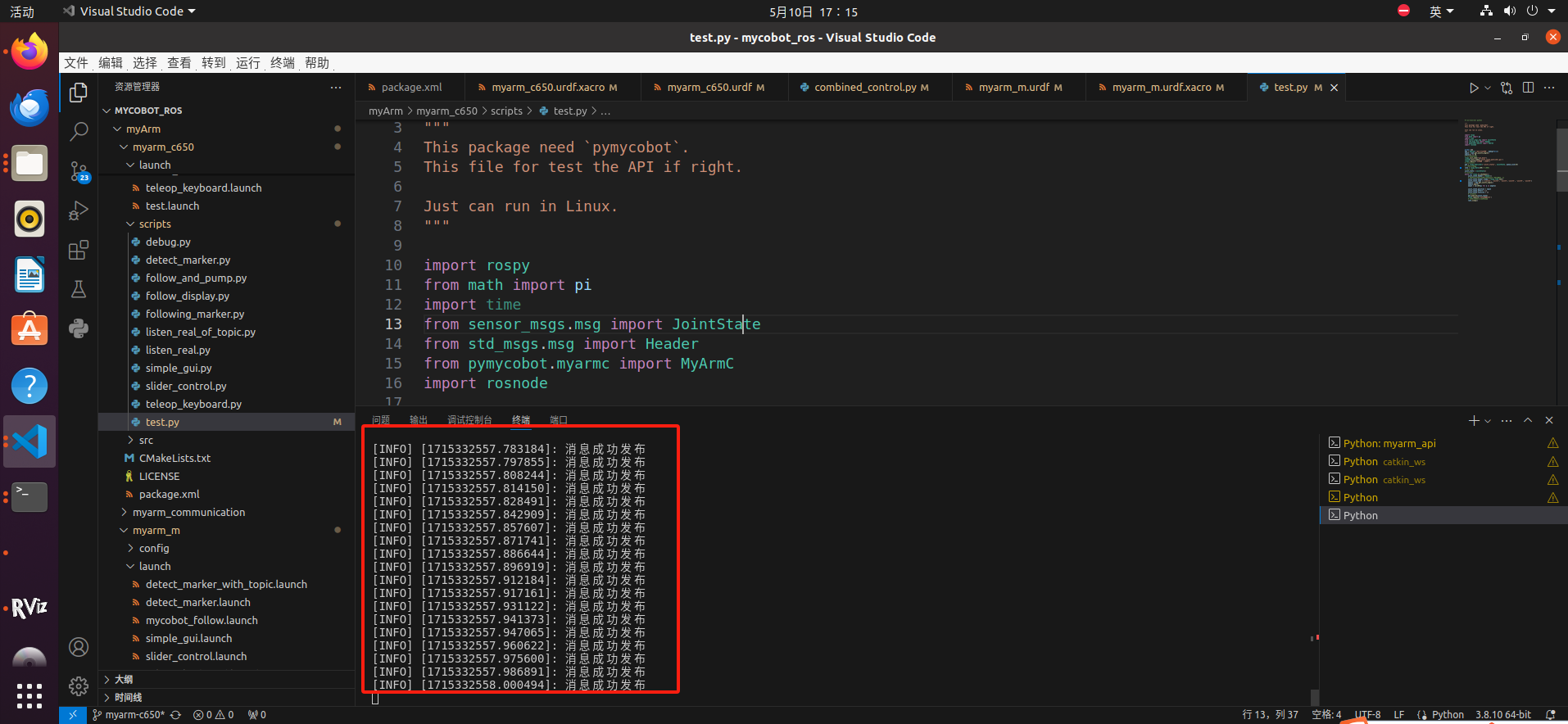
成功运行launch文件后,终端会显示:
rviz文件也会正常显示
打开VS code中的项目,找到 myArm/myarm_c650/scripts/test.py 这个 test.py 文件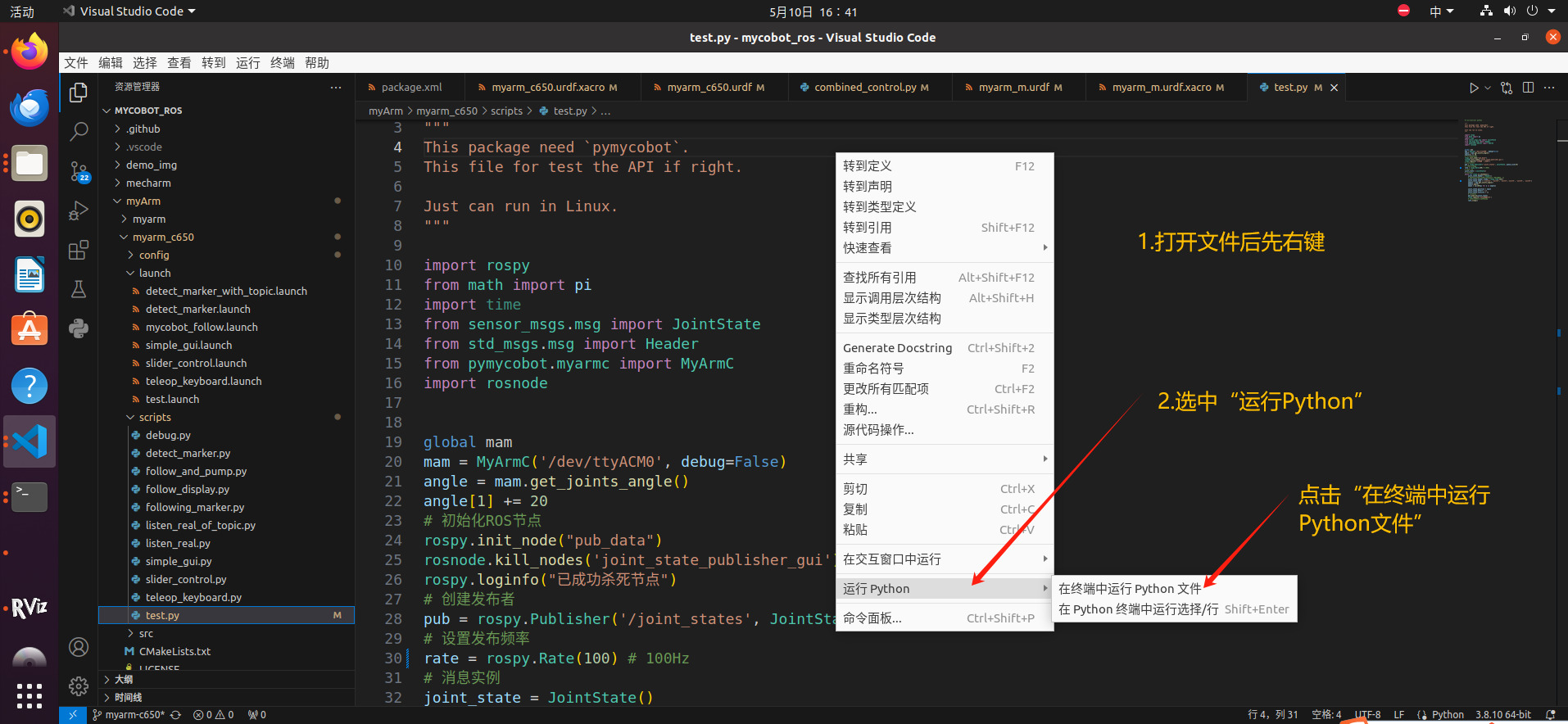
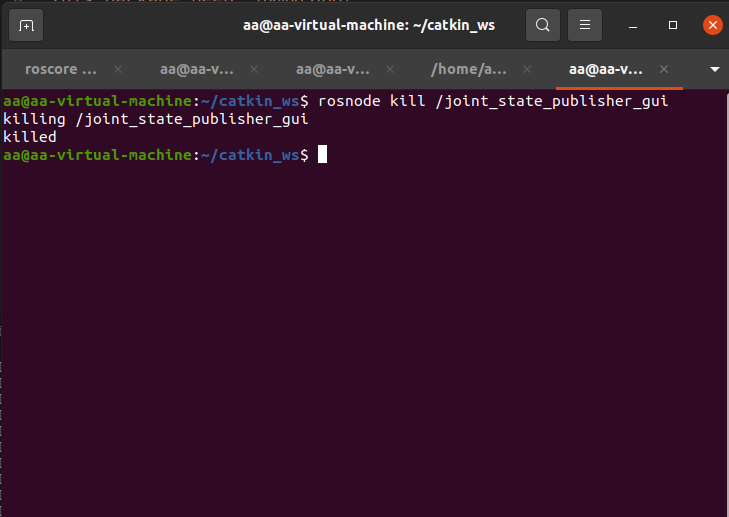
在工作空间里再新建一个终端,输入下面指令,杀死节点:
rosnode kill /joint_state_publisher_gui
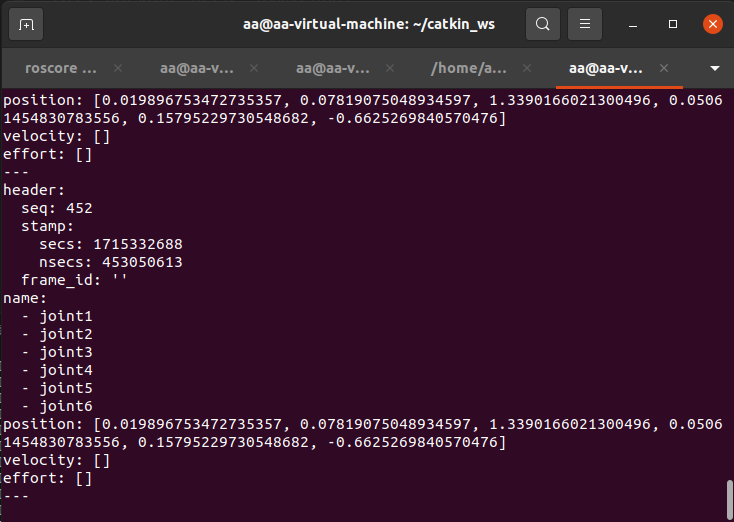
我们也可以继续在终端输入下面的指令,以便查看MyarmC650每个关节的角度变化:
rostopic echo /joint_state
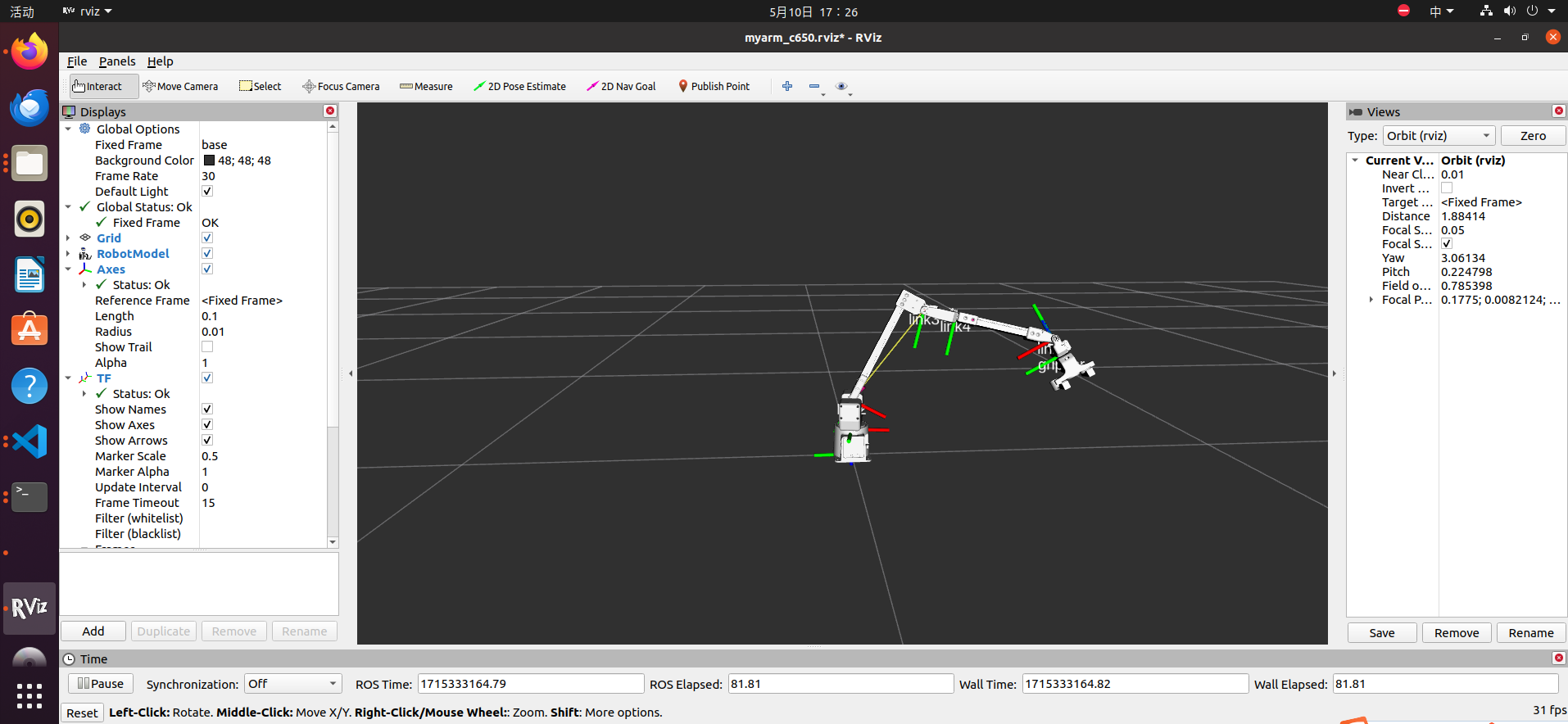
接下来我们用手移动现实中的MyarmC650机械臂,rviz中的机械臂也会跟着运动:
rosnode kill /joint_state_publisher_gui
至此与MyarmC650机械臂的交互已全部完成
二、MyarmC650控制MyarmM750运动
此功能需要将两台机械臂通过USB的方式同时连接到我们的电脑上,我们要区分每台机械臂连接我们的串口是多少,新建终端:
按 TAB键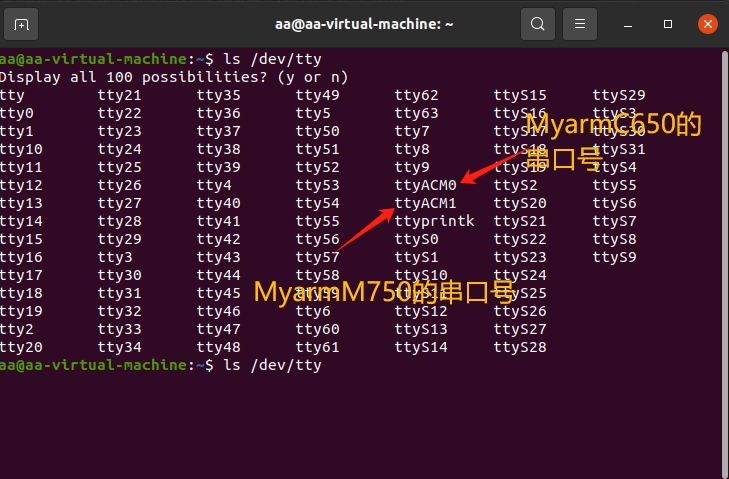
如何区分串口号:先连接一台机械臂然后输入ls /dev/tty查看当前串口号,在不断开这一台机械臂的情况下,连接另一台机械臂,输入该指令查看串口号
在工作空间新建一个终端输入:
roscore
再新建一个终端,输入:
source devel/setup.bash
roslaunch myarm_m combined_control.launch
启动rviz仿真之后,再打开myArm/myarm_m/scripts/combined_control.py 路径下的.py文件
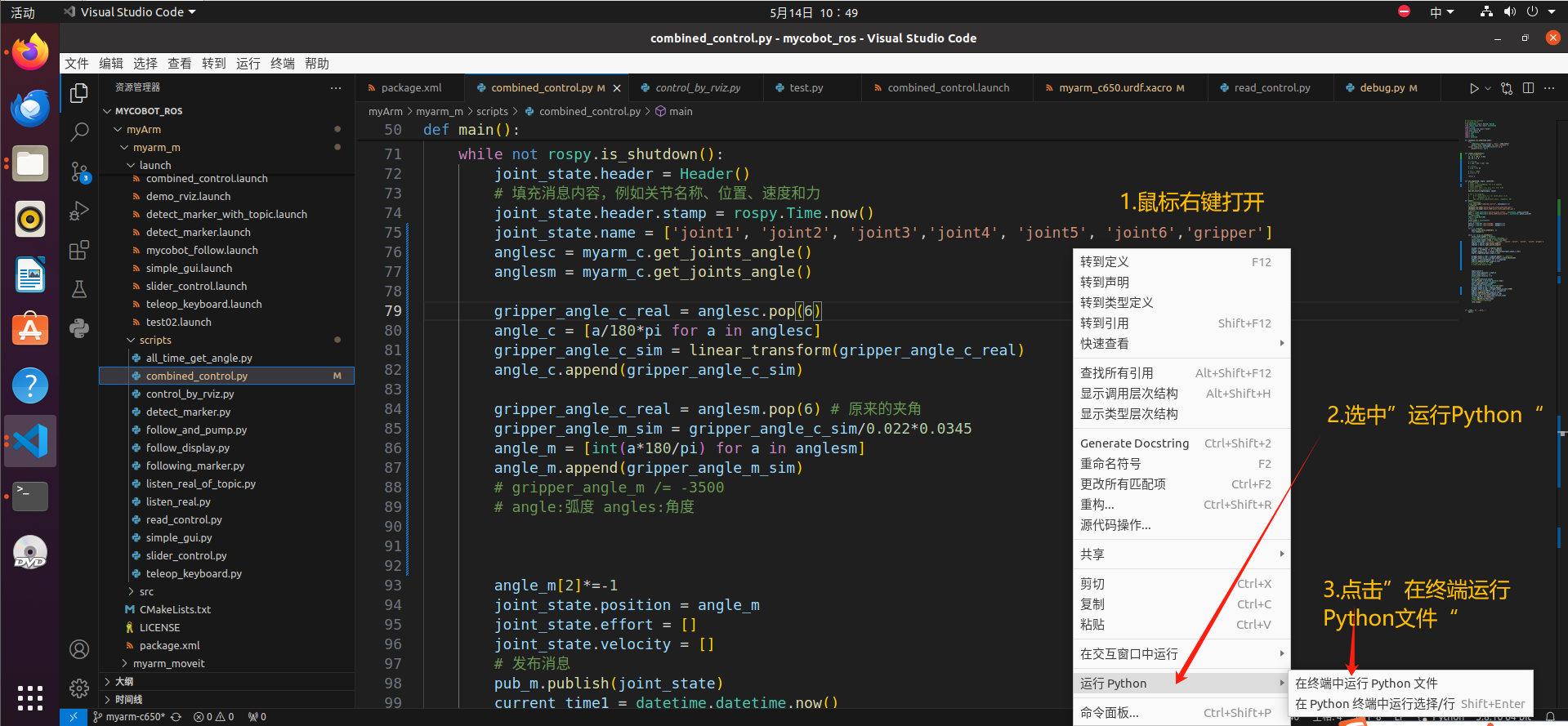
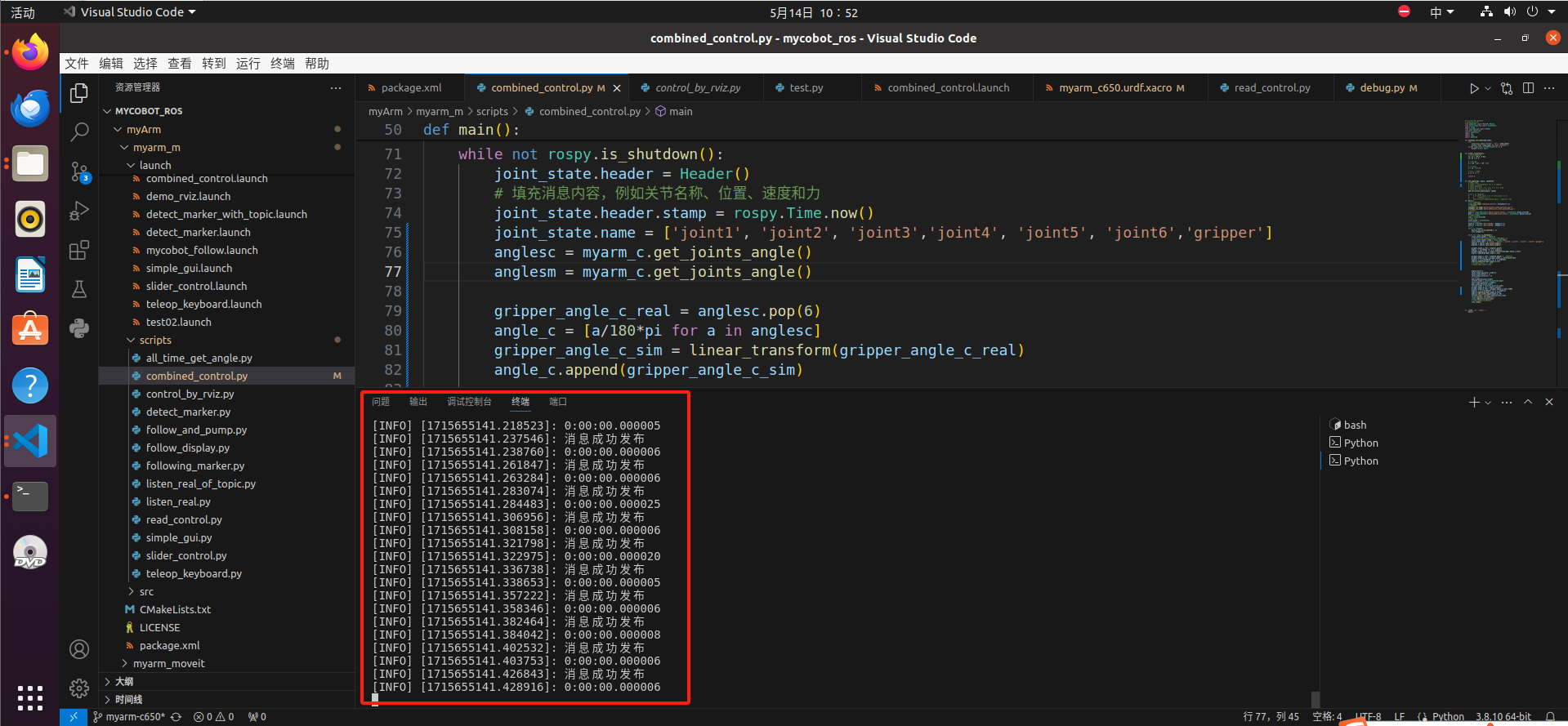
此时,我们就能用手去运动MyarmC650机械臂,rivz中的两款机械臂都跟随现实中的MyarmC650运动,在此同时,现实中的MayrmM750机械臂也会跟随MyarmC650运动(夹抓功能也可以运动)