C650控制M750程序案例
程序地址
https://github.com/elephantrobotics/pymycobot/tree/main/demo/myArm_M%26C_demo_v1.1
安装依赖
pip install -r requirement.txt
运行程序
python main.py
程序使用说明
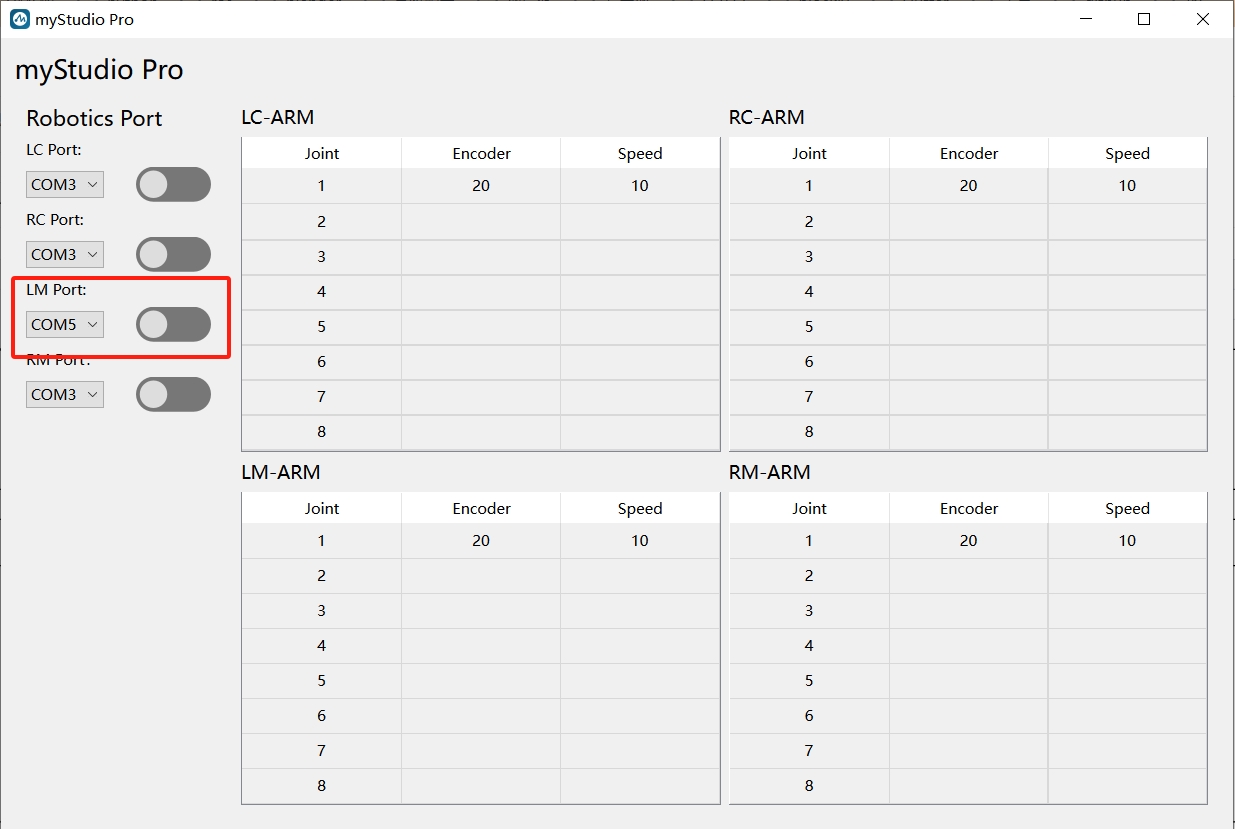
串口的打开有顺序要求:先开启 myArmM 的串口连接,再开启 myArmC 的串口连接。
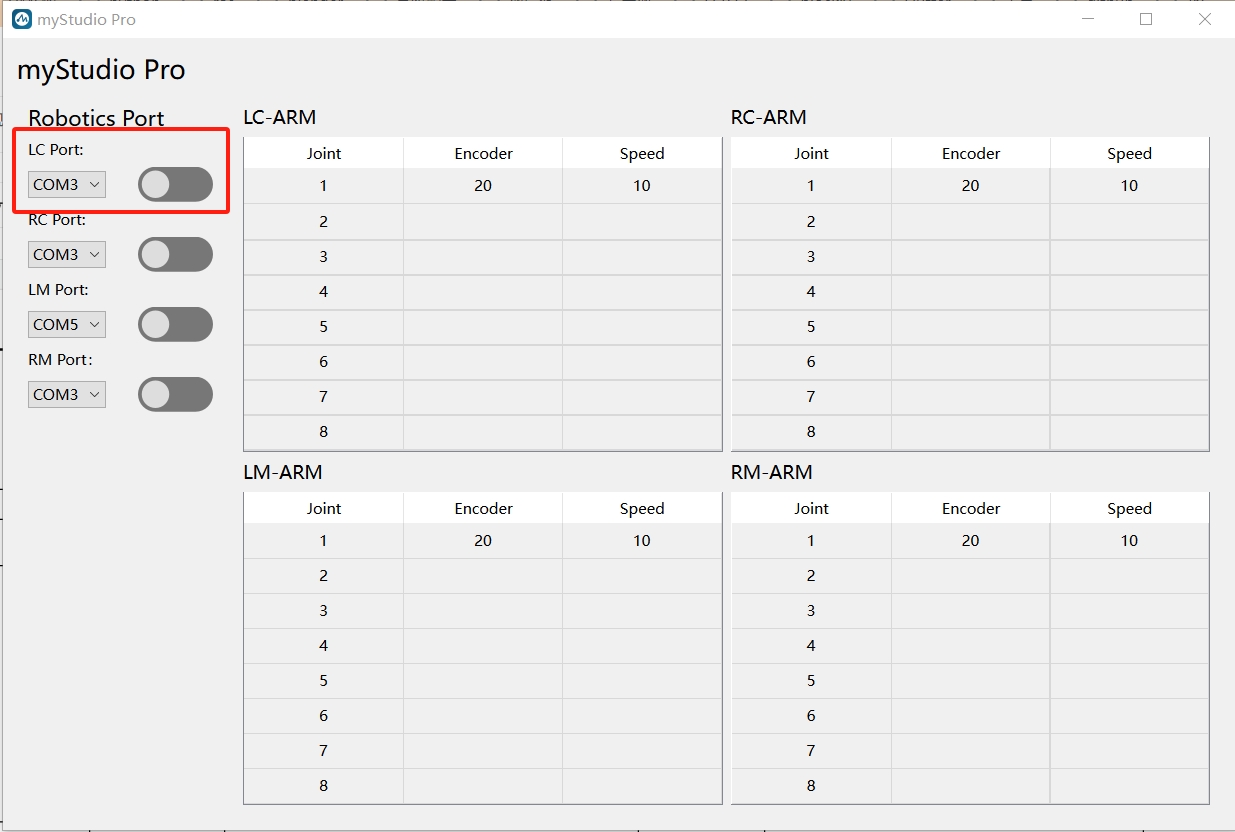
两个串口都开启以后就可以通过移动 myArmC 来控制 myArmM 运动。