python 获取IO输入状态案例
机械臂开机后,会自动进入串口通信模式
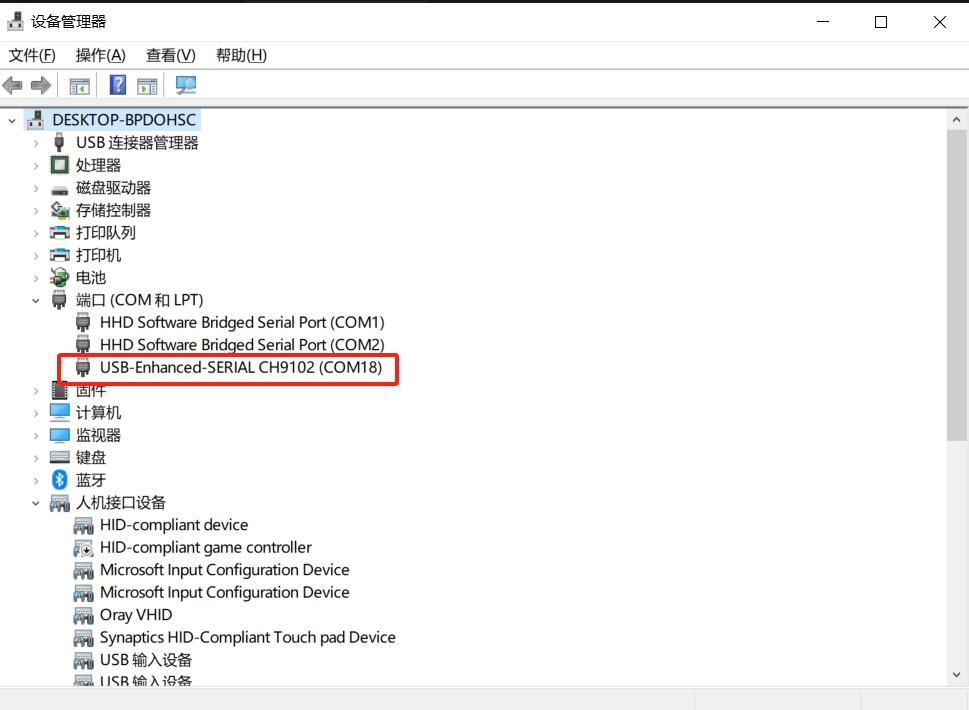
在设备管理器查看机械臂的串口号
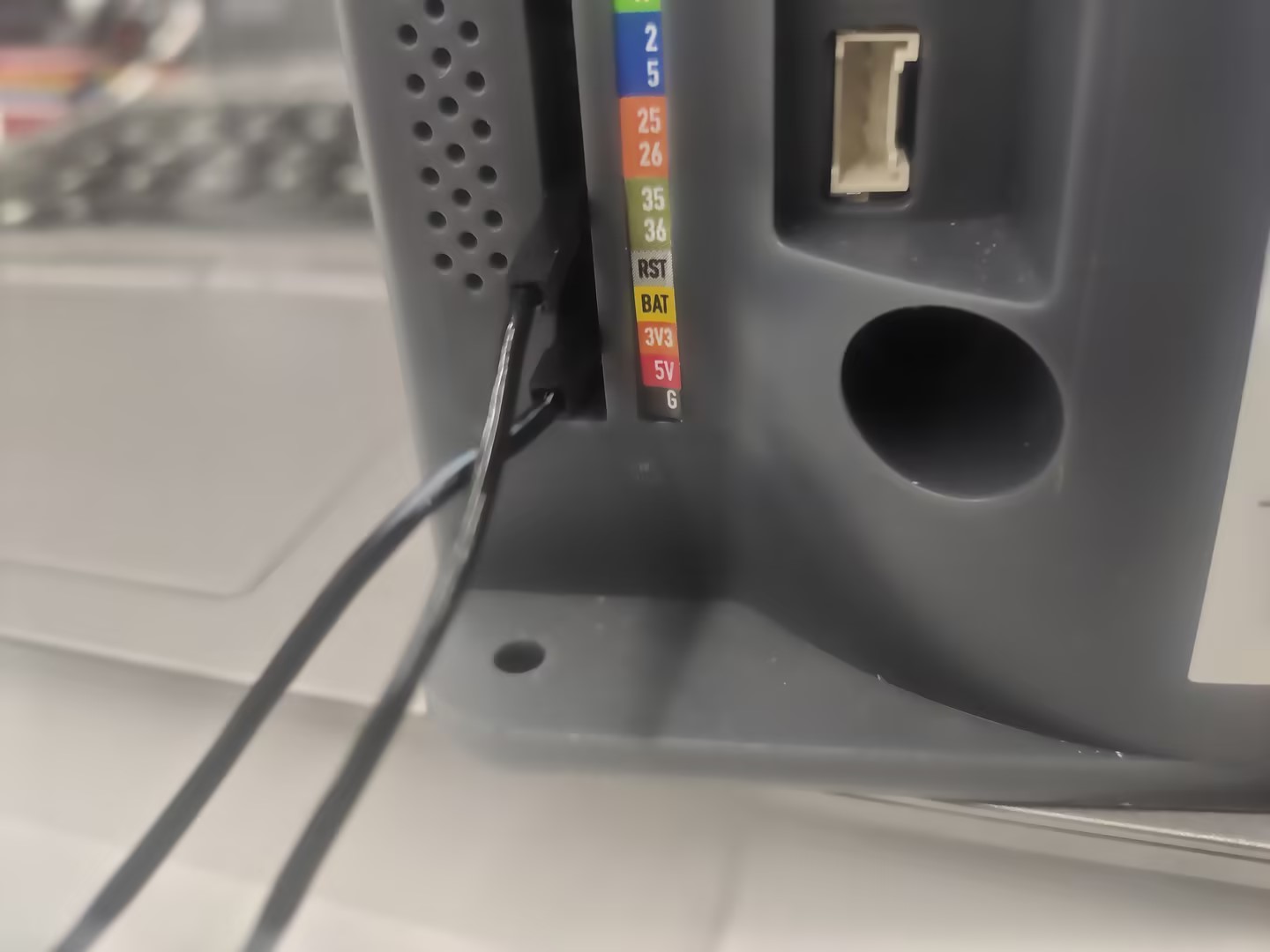
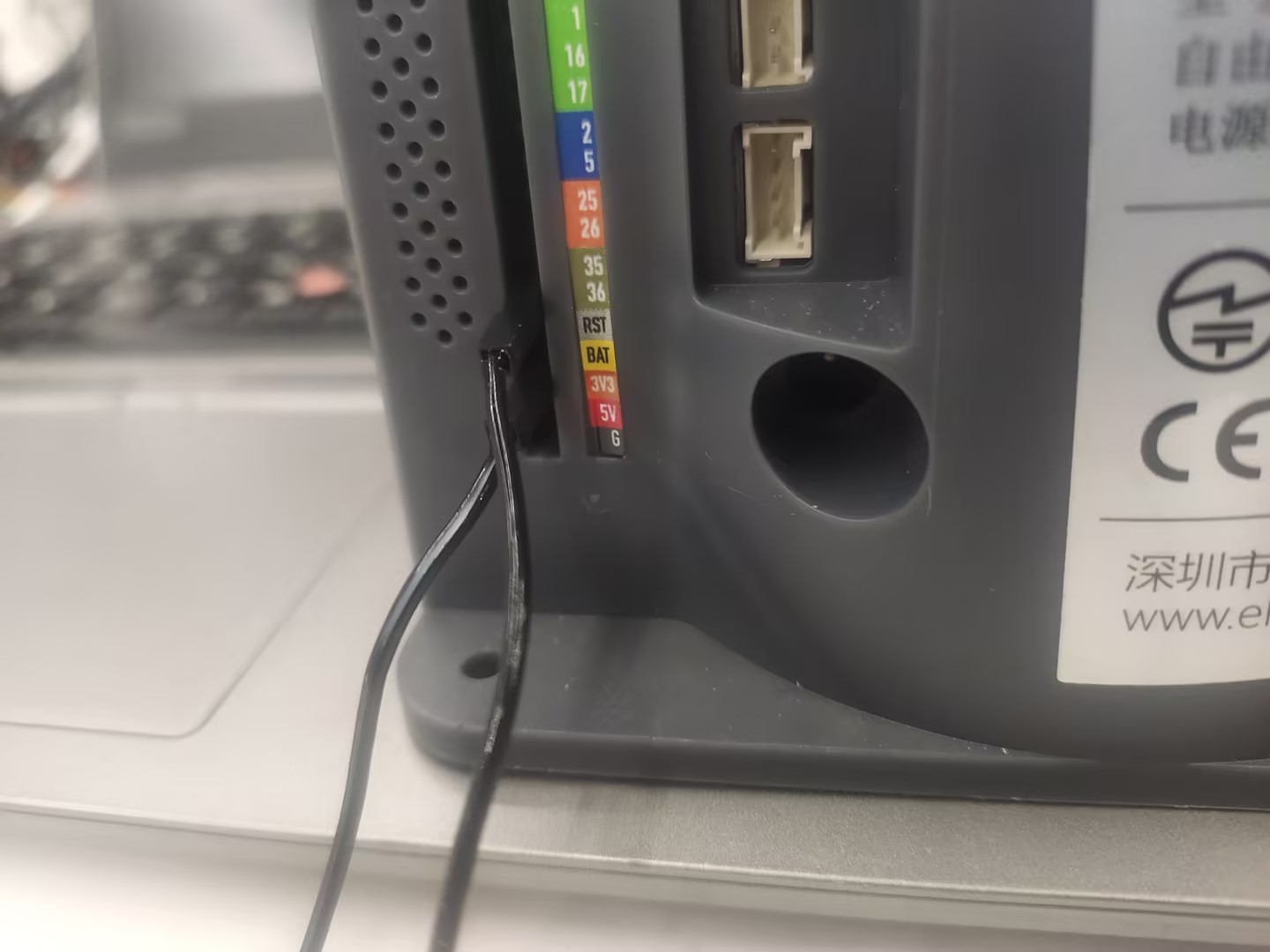
1 获取底部IO1输入状态
将杜邦线一端插到3.3V,杜邦线的另一端插到GPIO35上,模拟按键按下的效果
from pymycobot import MyArmC
import time
arm = MyArmC("COM18")#填写实际的串口号
while 1:
#当杜邦线接通时输出1,未接通输出0
print("IO=",arm.get_master_in_io_state(1))
运行效果:

2 获取底部IO2输入状态
将杜邦线一端插到3.3V,杜邦线的另一端插到GPIO36上,模拟按键按下的效果
from pymycobot import MyArmC
import time
arm = MyArmC("COM18")#填写实际的串口号
while 1:
#当杜邦线接通时输出1,未接通输出0
print(arm.get_master_in_io_state(2))
运行效果:

3 获取末端IO1输入状态
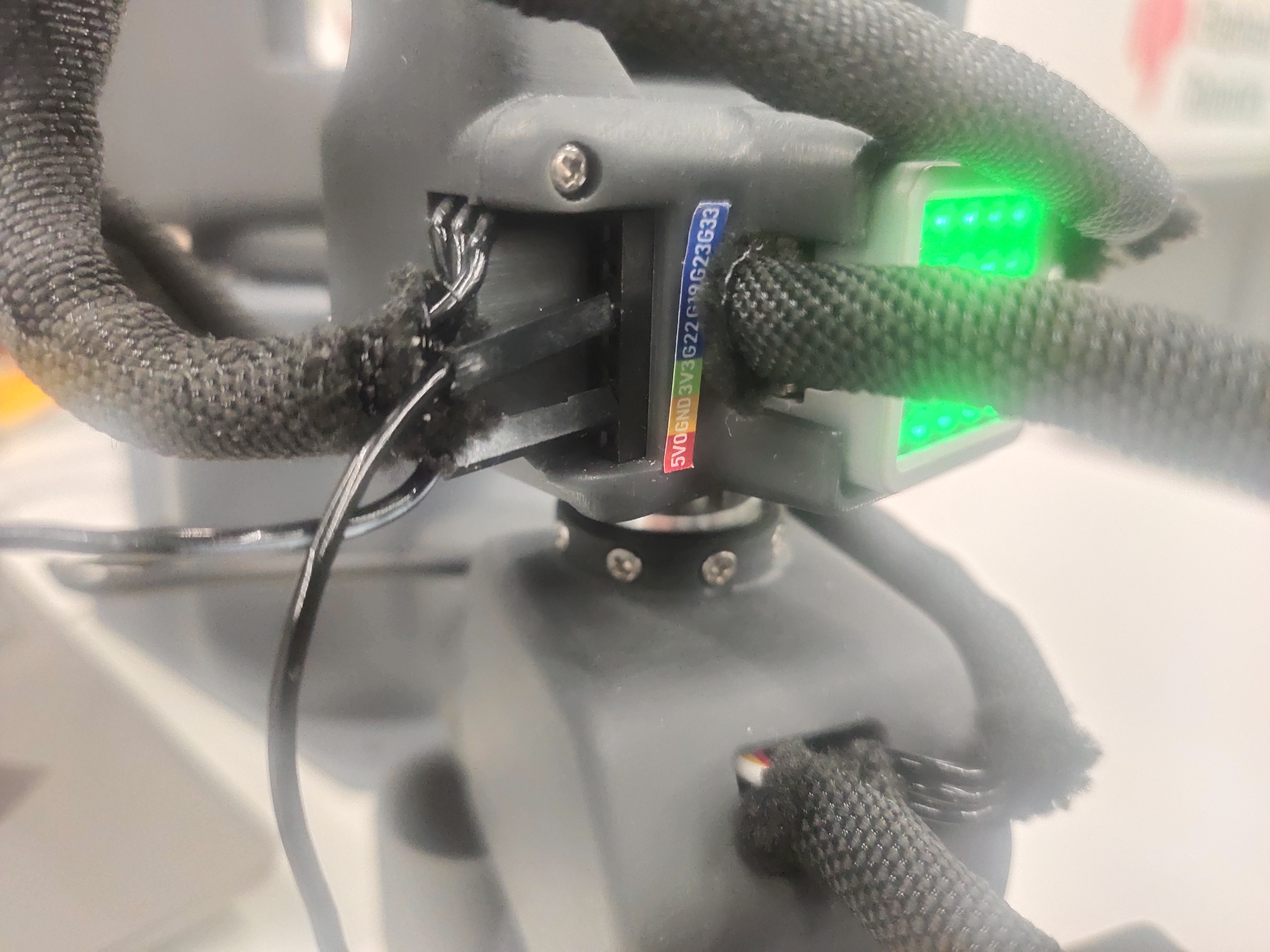
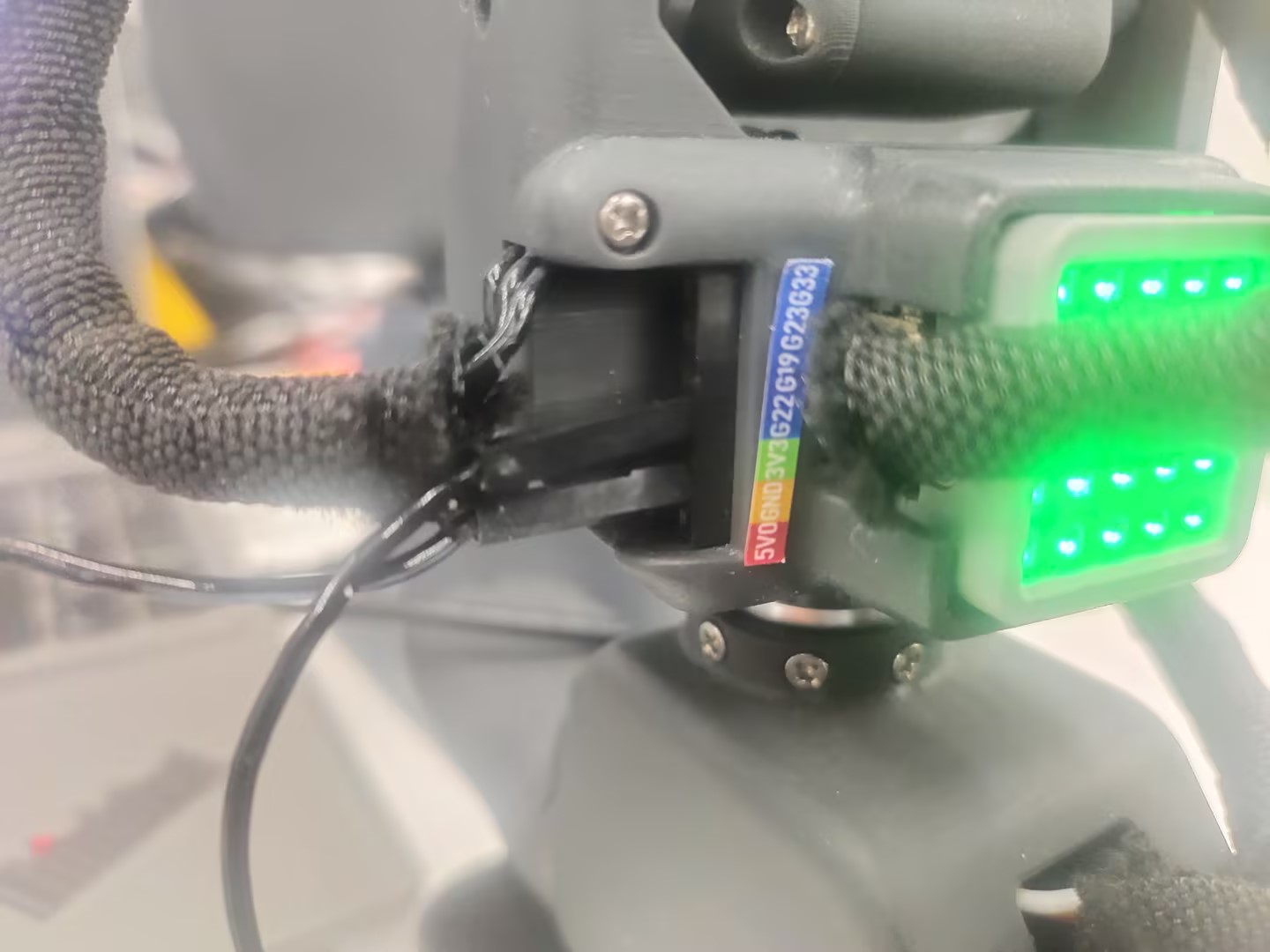
将杜邦线一端插到GND,杜邦线的另一端插到GPIO19上,模拟按键按下的效果
from pymycobot import MyArmC
import time
arm = MyArmC("COM18")#填写实际的串口号
while 1:
if arm.get_tool_in_io_state(1) is not None:
#当杜邦线未接通时输出1,接通时输出0
print("IO=",arm.get_tool_in_io_state(1))
运行效果:

4 获取末端IO2输入状态
将杜邦线一端插到GND,杜邦线的另一端插到GPIO22上,模拟按键按下的效果
from pymycobot import MyArmC
import time
arm = MyArmC("COM18")#填写实际的串口号
while 1:
if arm.get_tool_in_io_state(2) is not None:
#当杜邦线未接通时输出1,接通时输出0
print("IO=",arm.get_tool_in_io_state(2))
运行效果:

常见问题
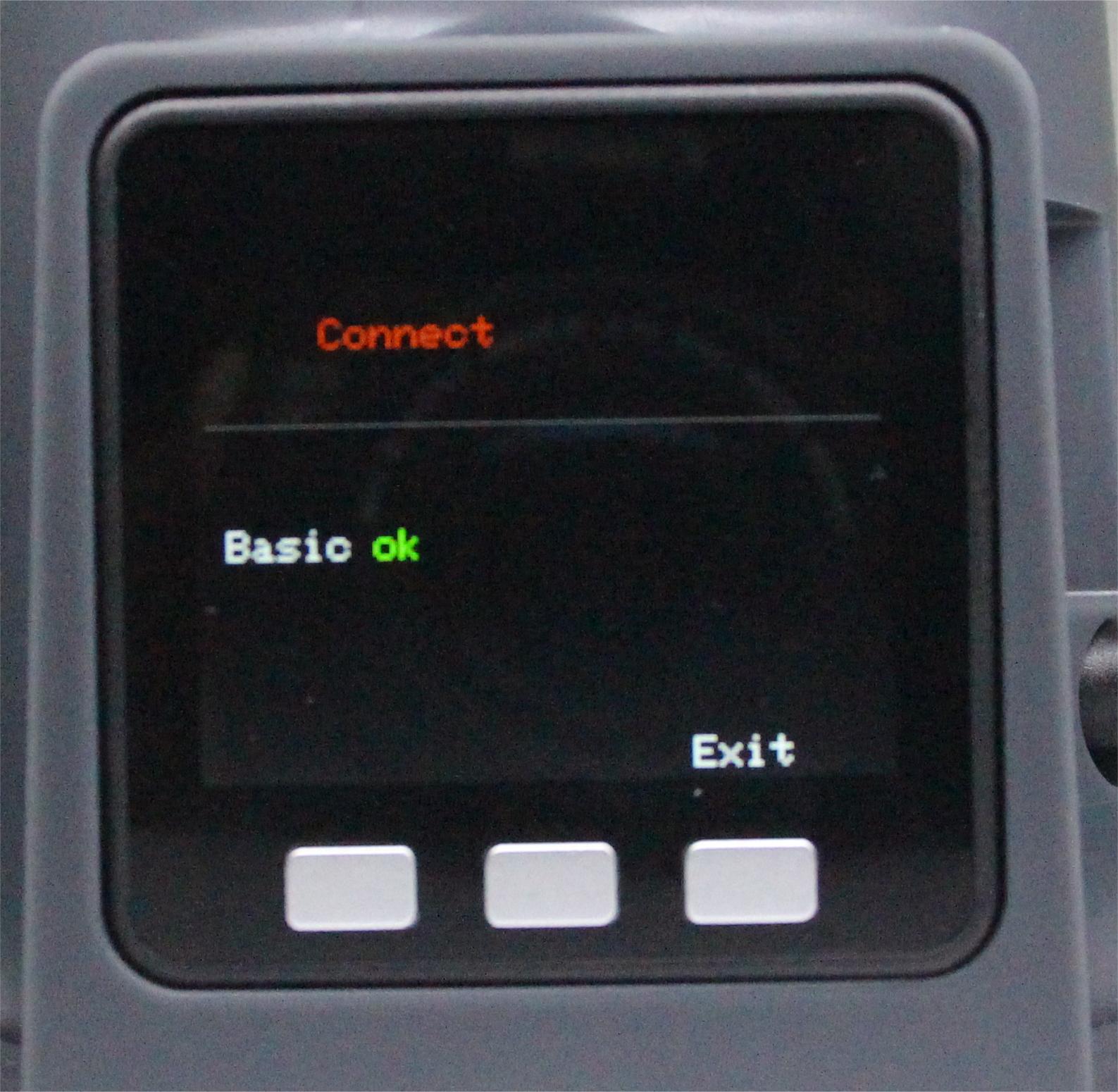
程序执行后,指令不生效,返回none现象,先检查屏幕底座的界面是否处于通信界面,且通信界面是否为OK,若显示no,先退出回到主界面,按照下面操作重新进入通信界面
Step 1:确认12V适配器及Type-C正确连接你的设备,选中Transponder点击OK进入通信转发界面。

Step 2: 使用串口连接,选中USB UART点击OK进入串口界面。串口界面检测Atom的连接(ok表示连接正常,否则显示no)。

注意事项:若是显示no,尝试重新退出后再进入即可