第二章 机器人参数说明
第一章中,我们探讨了产品的卖点及其设计理念,为您提供了对产品高层次理解的全景视角。现在,让我们进入第二章——机器人参数说明。这一章节将是您理解产品技术细节的关键。详细了解这些技术参数,不仅可以帮助您充分认识到我们产品的先进性和实用性,而且还能够确保您能够更有效地利用这些技术来满足您的具体需求。

1机器人规格参数
1.1机械臂参数
| 指标 | 参数 |
|---|---|
| 名称 | 小象协作机械臂 |
| 型号 | myCobot 280 for Jetson Nano 2023 |
| 自由度 | 6 |
| 有效负载 | 250g |
| 工作半径 | 280mm |
| 重复定位精度 | ±0.5mm |
| 重量 | 1030g |
| 电源输入 | 8-12V |
| 工作温度 | -5-45℃ |
| 通信 | Type-C |
2.控制核心参数
| 指标 | 参数 |
|---|---|
| 电源接口 | DC 8.4 v -14 v |
| 辅控 | ESP32×1 |
| 核心参数 | 240 MHz dual core. 600 DMIPS, 520KB SRAM. Wi-Fi dual mode Bluetooth |
| 核心Flash | 4MB |
| 核心IO | G19、G21、G22、G23、G25、G33 |
| 主控 | JetsonNano2G |
| SOC | Broadcom BCM2711 |
| 核心CPU | Quad-core ARM®A57 @1.43 GHz |
| 核心GPU | 128-core NVIDIA Maxwell™ |
| 核心Memory | 2 GB 64-bit LPDDR4 25.6 GB/s |
| 核心蓝牙 | 2.4G/5G |
| 核心网口 | ×1 |
| 核心无线 | 802.11ac |
| 核心视频接口 | HDMI×1 |
| 音频接口 | 3.5mm接口 |
| USB | USB 3.0×1 USB 2.0×2 |
| IO接口 | 2,3,4,5,6,7,9,11,12,13,16,17,18,19,20,21,22,23,24,25,26,27 |
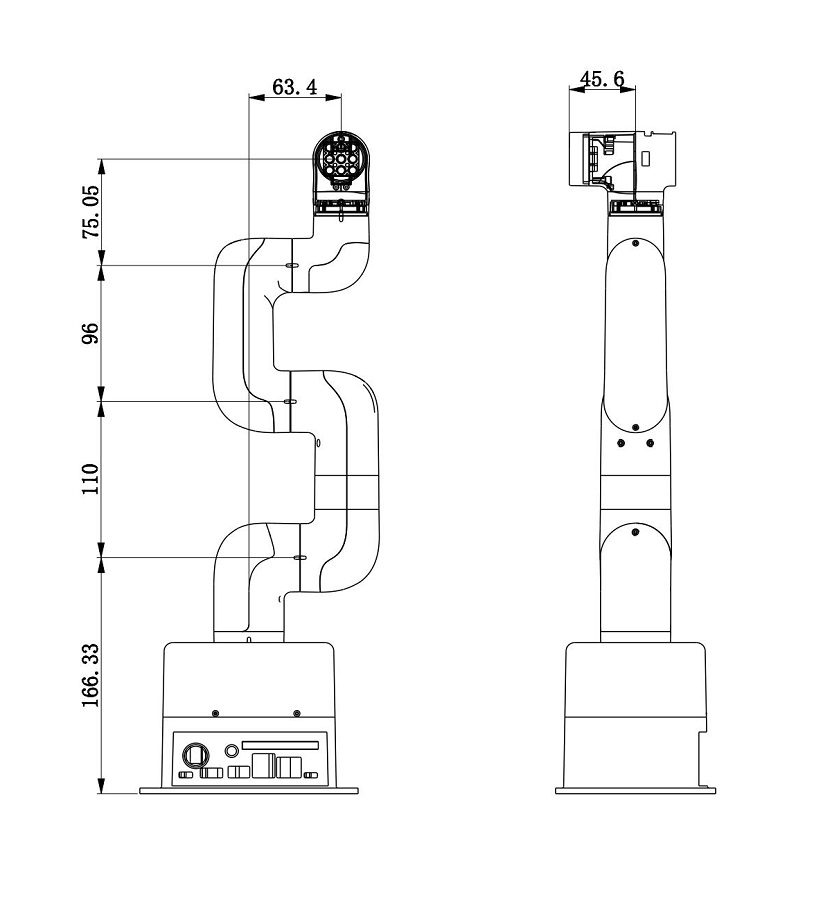
3.结构尺寸参数
3.1工作空间
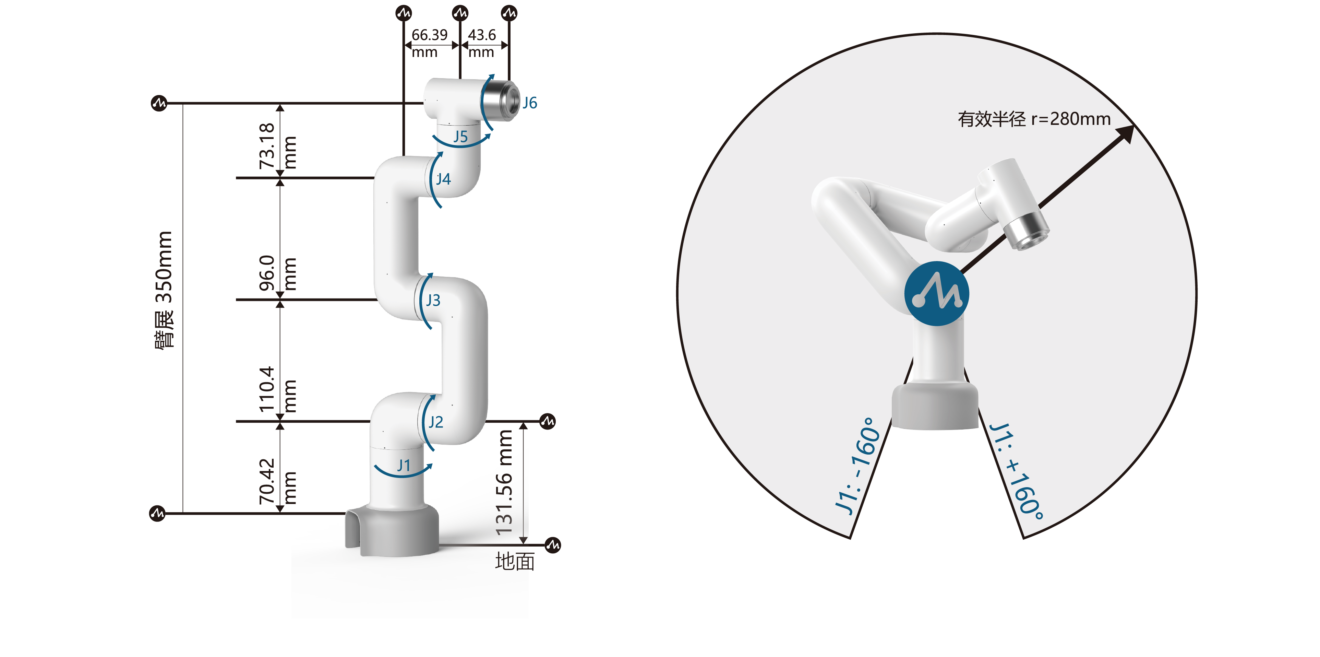
3.2规格尺寸
3.3关节运动范围
| 关节 | 范围 |
|---|---|
| J1 | -168 ~ +168 |
| J2 | -135 ~ +135 |
| J3 | -150 ~ +150 |
| J4 | -145 ~ +145 |
| J5 | -165 ~ +165 |
| J6 | -180 ~ +180 |
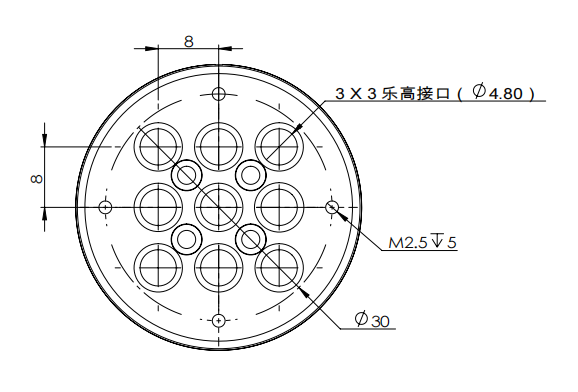
3.4孔位安装
- 机器人底座安装法兰,底座同时兼容乐高科技件安装方式和M4螺丝安装方式。
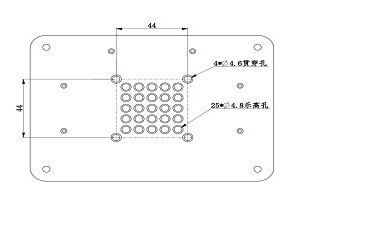
- 机器人末端安装法兰,机械臂末端同时兼容乐高科技件孔与螺丝螺纹孔。
4.电气特性参数
4.1机械臂底座电气接口
底座介绍
A. 底座接口如下图1 所示:
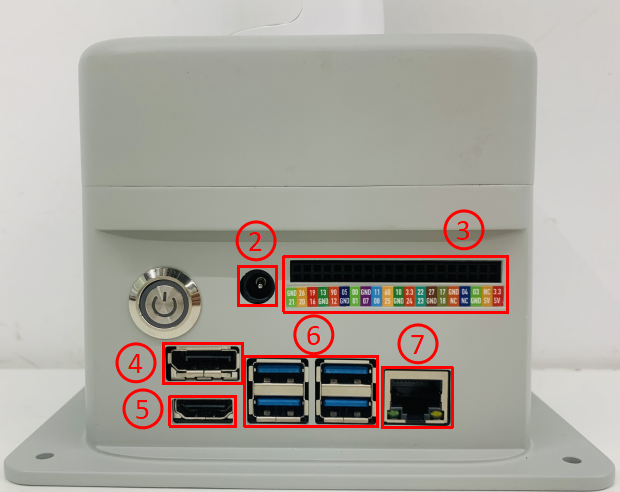
图 1 底座接口
- ① 开关按钮
- ② 电源DC接口
- ③ 功能接口组一
- ④ Type C
- ⑤ HDMI
- ⑥ USB3.0
- ⑦ USB2.0
- ⑧ 网口
- ⑨ Micro USB
底座接口说明
注意: 功能接口组均为2.54mm杜邦接口,外部可使用2.54mm杜邦线。
- A. 底座功能接口组一的各个接口定义如表1 所示:
| 标签 | 信号名 | 类型 | 功能 | 备注 |
|---|---|---|---|---|
| GND | GND | p | GND | |
| 26 | GPIO26 | I/O | GPIO26 | |
| 19 | GPIO19 | I/O | GPIO19 | |
| 13 | GPIO13 | I/O | GPIO13 | |
| 06 | GPIO6 | I/O | GPIO6 | |
| 05 | GPIO5 | I/O | GPIO5 | |
| 00 | GPIO0 | I/O | GPIO0 | |
| GND | GND | p | GND | |
| 11 | GPIO11 | I/O | GPIO11 | |
| 09 | GPIO9 | I/O | GPIO9 | |
| 10 | GPIO10 | I/O | GPIO10 | |
| 3.3 | 3.3V | P | DC 3.3V | |
| 22 | GPIO22 | I/O | GPIO22 | |
| 27 | GPIO27 | I/O | GPIO27 | |
| 17 | GPIO17 | I/O | GPIO17 | PAD 占用 |
| GND | GND | p | GND | |
| 04 | GPIO4 | I/O | GPIO4 | |
| 03 | GPIO3 | I/O | GPIO3 | SCL I2C总线(串行时钟线)占用 |
| NC | NC | - | - | 暂不支持 |
| 3.3 | 3.3V | P | DC 3.3V | |
| 21 | GPIO21 | I/O | GPIO21 | |
| 20 | GPIO20 | I/O | GPIO20 | |
| 16 | GPIO16 | I/O | GPIO16 | |
| GND | GND | p | GND | |
| 12 | GPIO12 | I/O | GPIO12 | |
| GND | GND | p | GND | |
| 01 | GPIO1 | I/O | GPIO1 | |
| 07 | GPIO7 | I/O | GPIO7 | |
| 08 | GPIO8 | I/O | GPIO8 | |
| 25 | GPIO25 | I/O | GPIO25 | |
| GND | GND | p | GND | |
| 24 | GPIO24 | I/O | GPIO24 | |
| 23 | GPIO23 | I/O | GPIO23 | |
| GND | GND | p | GND | |
| 18 | GPIO18 | I/O | GPIO18 | PAD 占用 |
| NC | NC | - | - | 暂不支持 |
| NC | NC | - | - | 暂不支持 |
| GND | GND | p | GND | |
| 5V | 5V | P | DC 5V | |
| 5V | 5V | P | DC 5V |
注意:
I: 仅作为输入。
I/O: 该功能信号包含输入和输出组合。
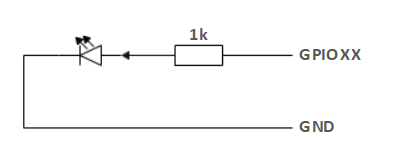
当管角设置为输出端时,它将输出电压3.3V。
1、单个管角的拉电流随管脚数量增加而减小,从约40mA减小到29mA。
如果某个GPIO被设置为输出模式时,输出高电平信号,电路连接如图 2 所示,LED灯将点亮。
图 2
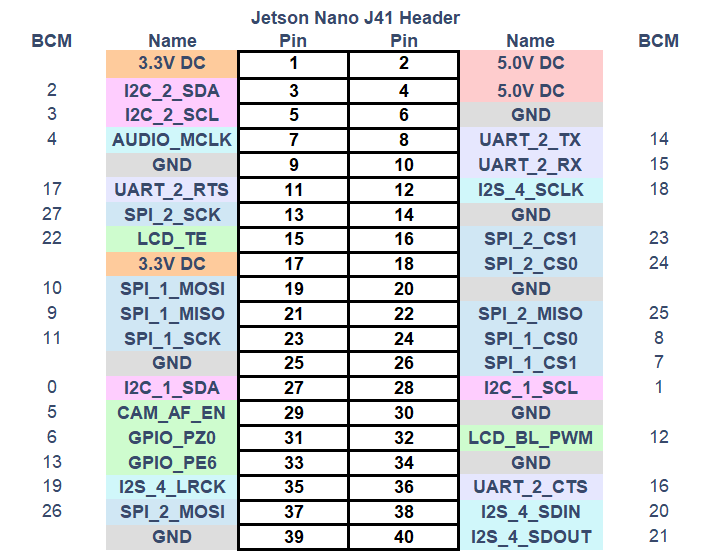
- 关于功能接口的其他功能表如图3 所示,使用其他功能的情况下,IO功能不可用。
图 3
B. 电源DC接口:使用DC电源插座,外径6.5mm,内径2.0mm;可使用厂家配备的8.4V 5A DC电源适配器给 myCobot 280 进行供电。
C. 按键开关:按下后内部上电,按键亮白光;再次按下,白光熄灭,内部断电。
D. Jetson nano 自带供电口,仅给Jetson nano自身供电,无法给整个机器供电,所以电源DC接口可以正常使用的时候无需接此接口。
E. HDMI :该接口为HDMI A型接口,如需显示机器人操作界面,用户可以通过连接HDMI显示接口,将操作页面显示到其他设备终端。
F. USB2.0:以串口总线标准2.0进行数据连接的接口;用户可以使用USB接口拷贝程序文件,也可以使用USB接口连接鼠标、键盘等外设。
G. USB3.0:以串口总线标准3.0进行数据连接的接口;用户可以使用USB接口拷贝程序文件,也可以使用USB接口连接鼠标、键盘等外设。
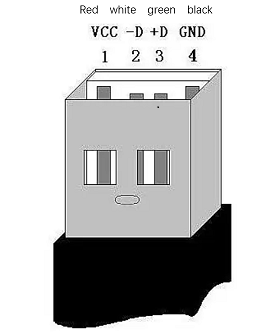
图 4
H. 网口:网络数据连接的端口,用户使用Ethernet接口可以用于PC端与机器人系统的通信交互,也可以用于与其他设备进行以太网通信。
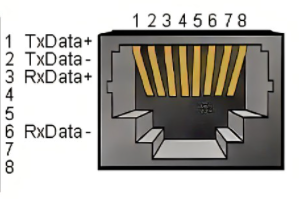
图 5
I. Micro USB:以串口总线标准2.0进行数据连接的接口;用户可以使用安卓线拷贝程序文件。
4.2机械臂末端电气接口
机械臂末端介绍
A. 机械臂末端如图 6 和图7 所示:

图 6 机械臂末端
- ① 舵机接口
- ② Atom
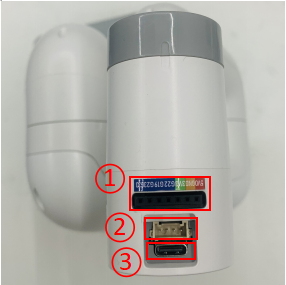
图7 机械臂末端
- ① 功能接口组二
- ② Grove
- ③ Type C
末端接口说明
- A. 功能接口组二各个接口的定义如表2 所示:
| 标签 | 信号名 | 类型 | 功能 | 备注 |
|---|---|---|---|---|
| 5V | 5V | P | DC 5V | |
| GND | GND | P | GND | |
| 3V3 | 3V3 | P | DC 3.3V | |
| G22 | G22 | I/O | GPIO22 | |
| G19 | G19 | I/O | GPIO19 | |
| G23 | G23 | I/O | GPIO23 | |
| G33 | G33 | I/O | GPIO33 |
注意:
I: 仅作为输入。
I/O: 该功能信号包含输入和输出组合。
当管角设置为输出端时,它将输出电压3.3V。
1、单个管角的拉电流随管脚数量增加而减小,从约40mA减小到29mA。
如果某个GPIO被设置为输出模式时,输出高电平信号,电路连接如图 8 所示,LED灯将点亮。

图 8
B. Type C:可用于和PC端连接通讯,更新固件使用。
C. Grove : 定义如图 9 所示
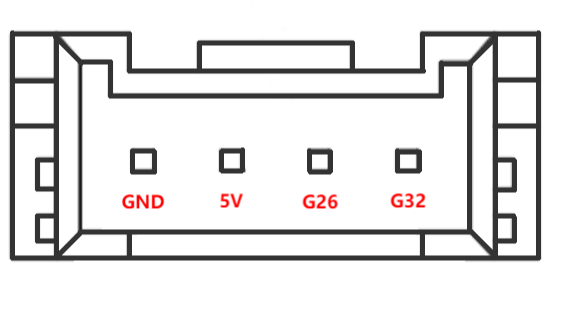
图 9 Grove
D. 舵机接口:用于末端拓展夹爪时使用,当前支持配套的自适应夹爪使用。
E. Atom:用于 5X5 RGB LED(G27)显示和按键功能(G39)
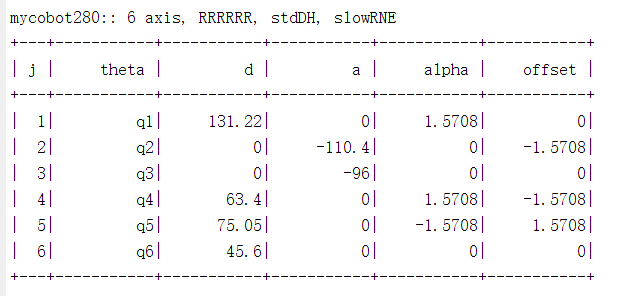
5.DH参数
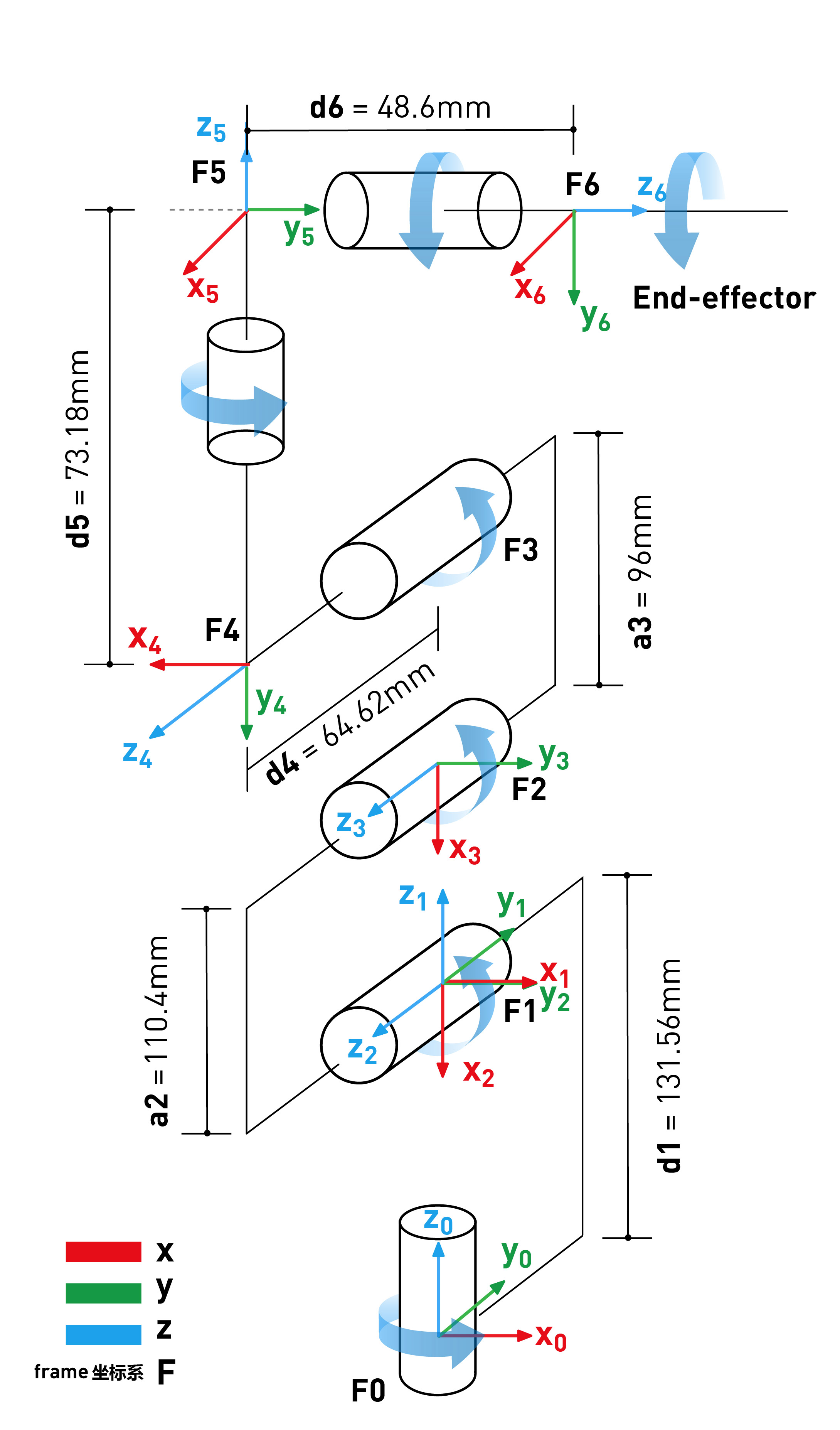
SDH参数表: