系统基础功能说明
1.机器人系统介绍
系统简介
Ubuntu是个人桌面操作系统中使用最广泛的linux操作系统。对于初学者来说,熟悉linux环境或一些嵌入式硬件操作系统是一个很好的选择。ubuntu官方网站还发布了树莓派专用操作系统。

系统功能简介
myStudio:固件烧录软件,用于更新和烧录新版本固件
myBlockly:图形化编程软件,可直接通过拖拽积木组成运行代码,控制机械臂
ROS1 Shell:直接进入编译好的ROS1环境,可直接输入对应指令,运行对应的ROS1代
ROS2 Shell:直接进入编译好的ROS2环境,可直接输入对应指令,运行对应的可直接运行ROS2代码
Github-ElephantRobotics:大象机器人官方开源代码仓库
Home-ElephantRobotics:大象机器人官网主页
UserManual - CN/EN:机器使用手册,包含所有关于机械臂控制的内容
WiFi_ON/OFF:WiFi开关,点击即可打开/关闭WiFi功能
HotSpot_ON/OFF:热点开关,点击即可打开/关闭热点功能,打开后热点名称为ElephantRobotics_AP_XXXX
Language Support:系统语言设置,点击即可进入系统语言设置界面
2.系统密码说明
开机账户密码 & VNC 连接密码 & SSH 连接密码 & 管理员账户密码
- 统一为:Elephant
如何定义新的密码
更改账户密码
使用快捷键
ctrl + alt + T打开终端输入
passwd进行账户密码修改输入新密码两次即可
更改VNC连接密码
使用快捷键
ctrl + alt + T打开终端输入
vncpasswd进行账户密码修改输入新密码两次即可
更改SSH连接密码
- SSH远程连接输入的就是管理员账户密码,无需单独修改
更改管理员账户密码
使用快捷键
ctrl + alt + T打开终端输入
sudo passwd进行账户密码修改输入新密码两次即可
3.连接网络
Jetson nano版本机械臂仅支持有线网络连接,下面介绍PC通过网线共享网络的连接方式:
1.需要准备一根网线和带有网口的USB扩展坞

2.将网线一段连接到机械臂的网口,另一端连接拓展坞的网卡,将拓展坞的USB接口连接PC。
- 初次连接PC会以驱动器的形式出现,需要新安装驱动才能识别到机械臂的以太网。桌面右下角会出现如下图提示:
点击该提示会打开如下图界面,点击运行:
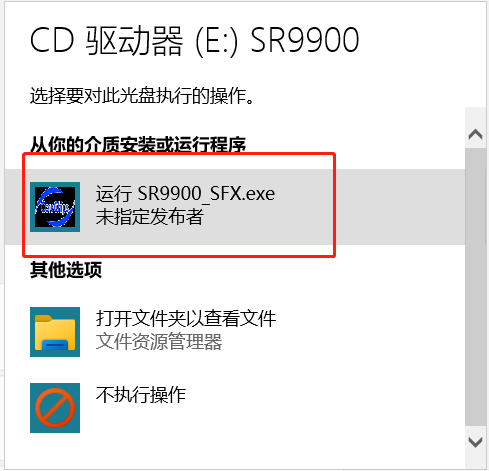
运行完成以后,PC就可以识别到机械臂的以太网了。
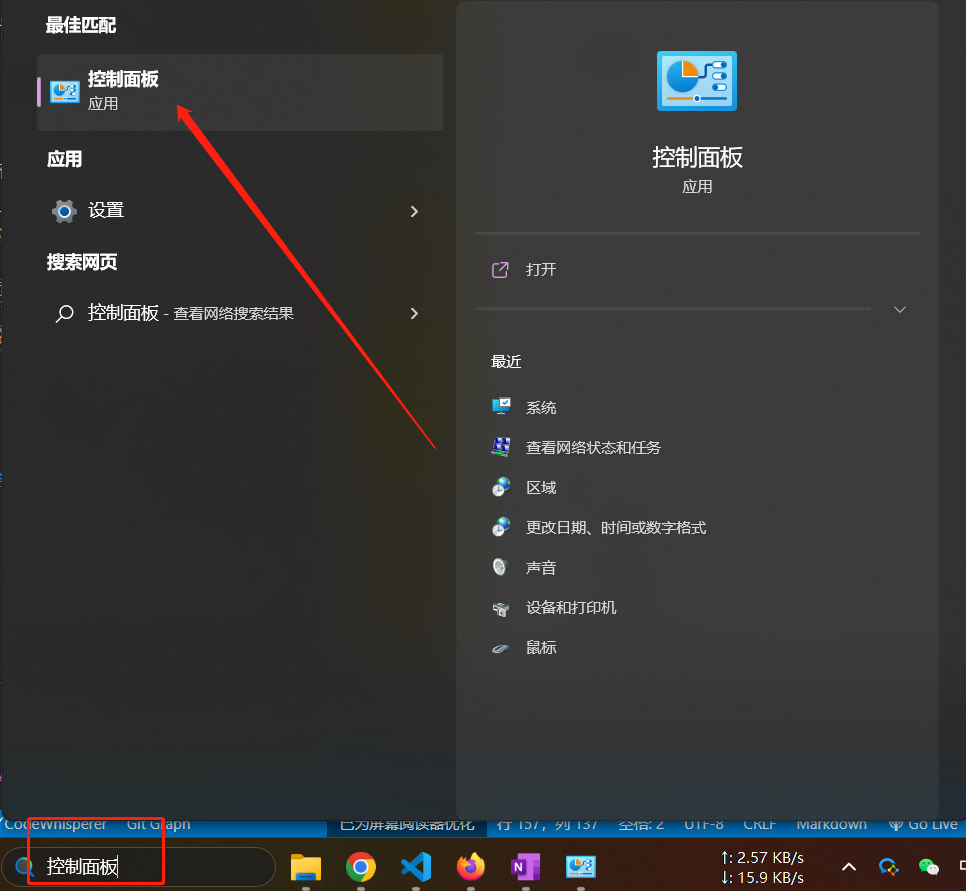
- 3.PC通过搜索栏搜索
控制面板,打开控制面板!
- 选择
查看网络状态和任务

再点击更改适配器设置
 选中PC连接的网络,右击点击
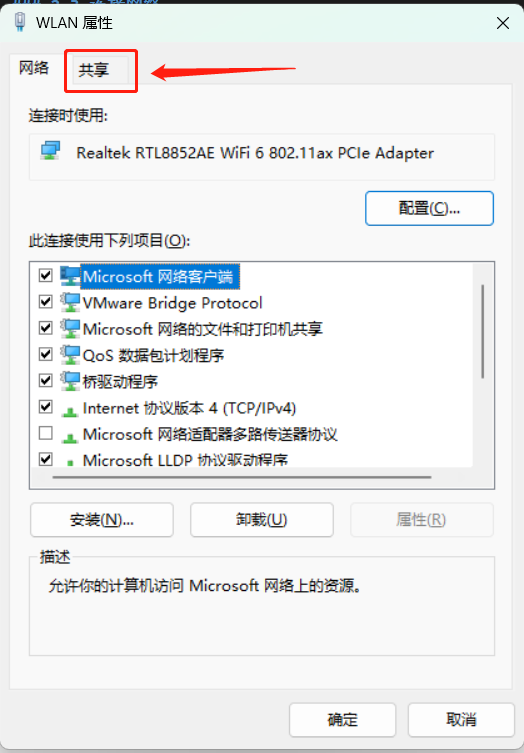
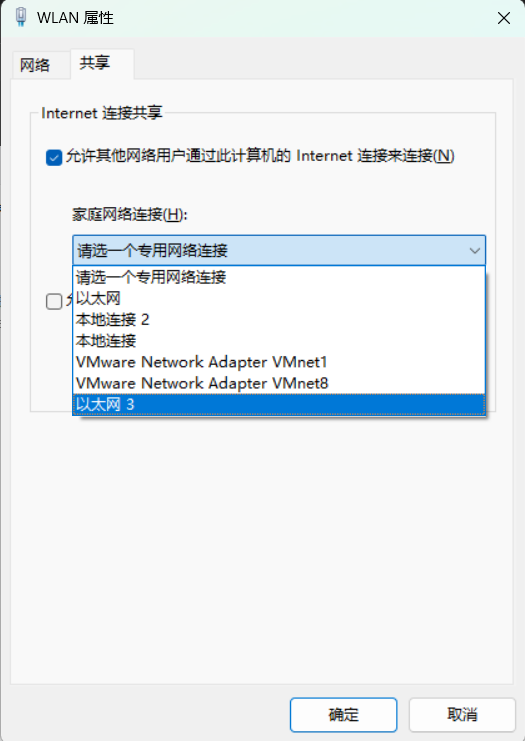
选中PC连接的网络,右击点击属性
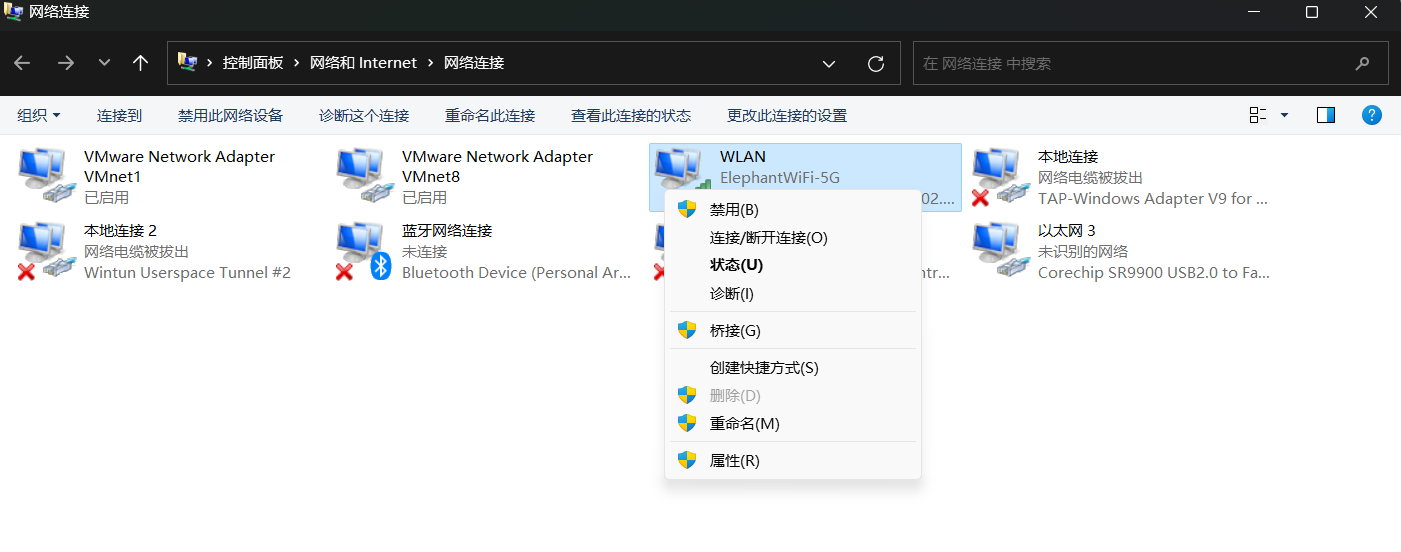
再选择共享,勾选允许其他网络用户通过此计算机的Internet连接来连接,并且选择机械臂的以太网(有的电脑没有此选项,不选即可),点击确定退出。
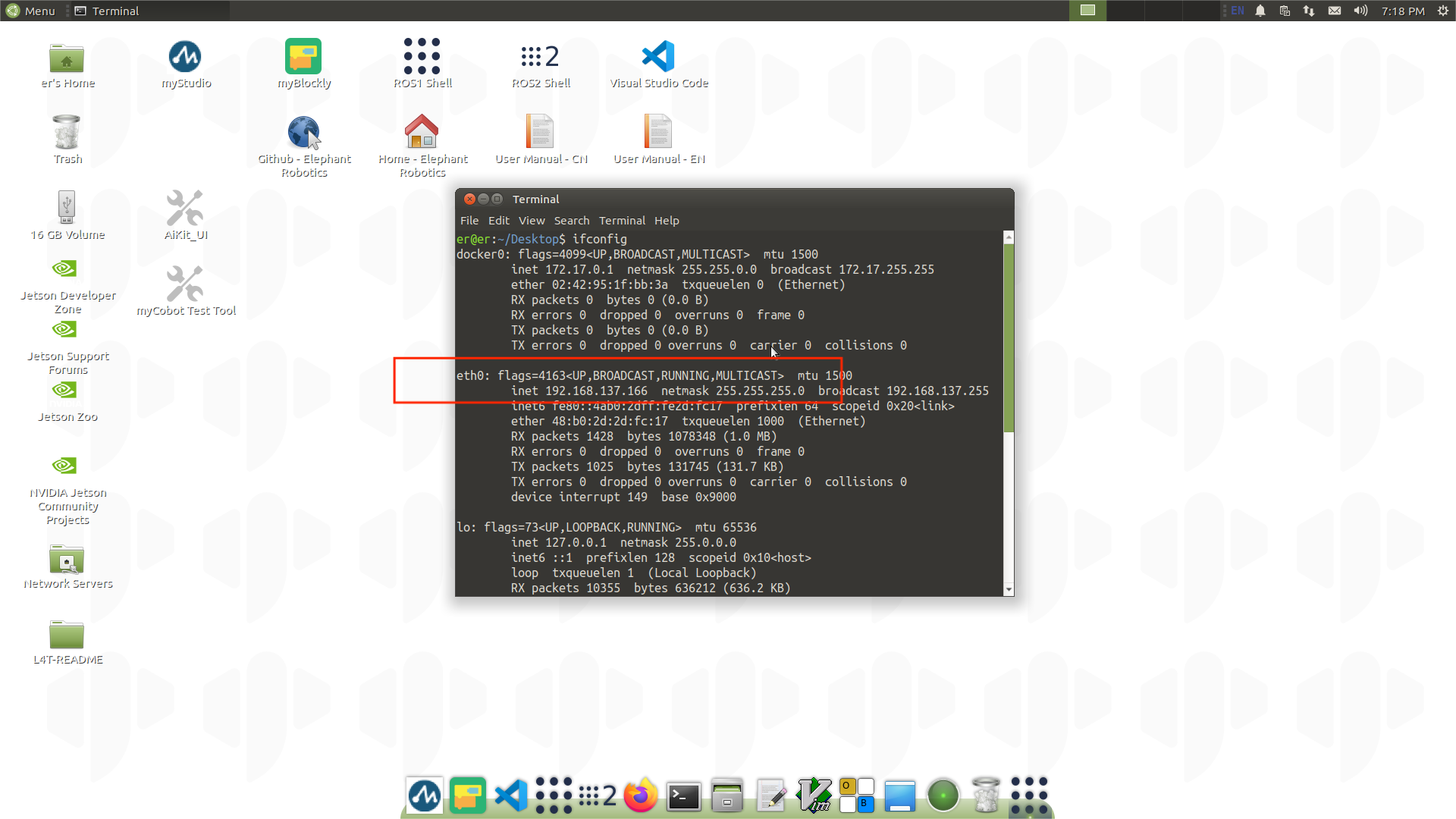
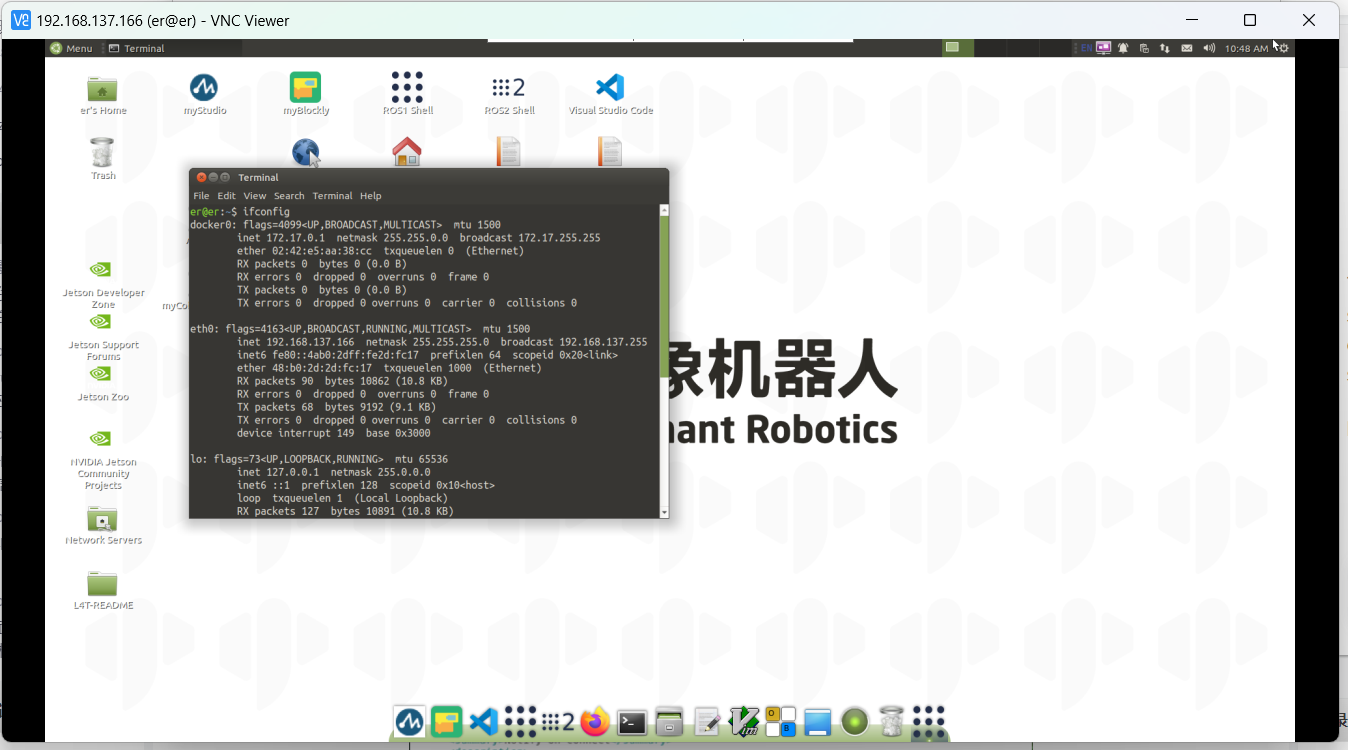
- 3.完成上述步骤以后,机械臂系统,通过快捷键
ctrl+alt+t,打开终端,输入ifconfig后回车,出现eth0就表示联网成功了:
4.VNC
VNC 功能介绍
- 是一款远程控制的软件,一般用于远程解决电脑故障或软件调试.使用VNC的前提是机械臂已经连接上了网络,并且PC端需要安装VNC viewer软件\
VNC端口说明
- 机械臂与PC连接在同一WiFi下或者通过网线共享网络给机械臂,机械臂IP地址即为端口
连接VNC 通过网线连接网络以后,通过快捷键
ctrl+alt+t,打开终端,输入ifconfig后回车,可以获得机械臂的网络IP地址:
PC端打开VNC viewer软件,输入机械臂的IP地址,按回车即可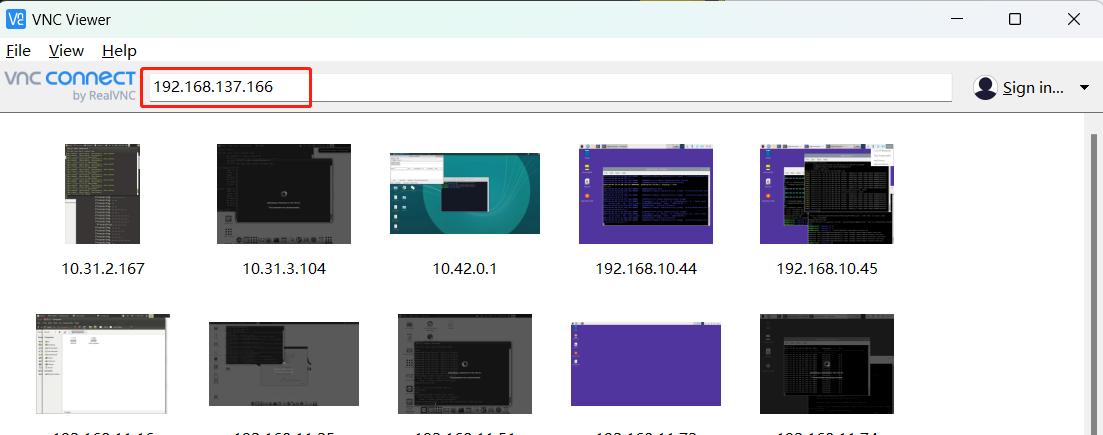
如何提高流畅性
- 远程连接流畅性取决于所连WiFi的流畅性,建议连接稳定的WiFi进行远程控制
5.SSH
SSH 功能介绍
- 简单说,SSH是一种网络协议,用于计算机之间的加密登录。如果一个用户从本地计算机,使用SSH协议登录另一台远程计算机,我们就可以认为,这种登录是安全的,即使被中途截获,密码也不会泄露。
SSH端口说明
- 默认端口22,无需更改
SSH 首次连接
按照 2.3 VNC 确认机械臂IP地址
在个人电脑按下
win + R打开运行界面,在输入框输入cmd
- 输入完毕后点击确认,即可打开shell界面
- 输入
ssh er@IP地址,然后回车(IP地址以机械臂显示为主,图中仅为示例) - 出现如下提示,输入
yes,然后回车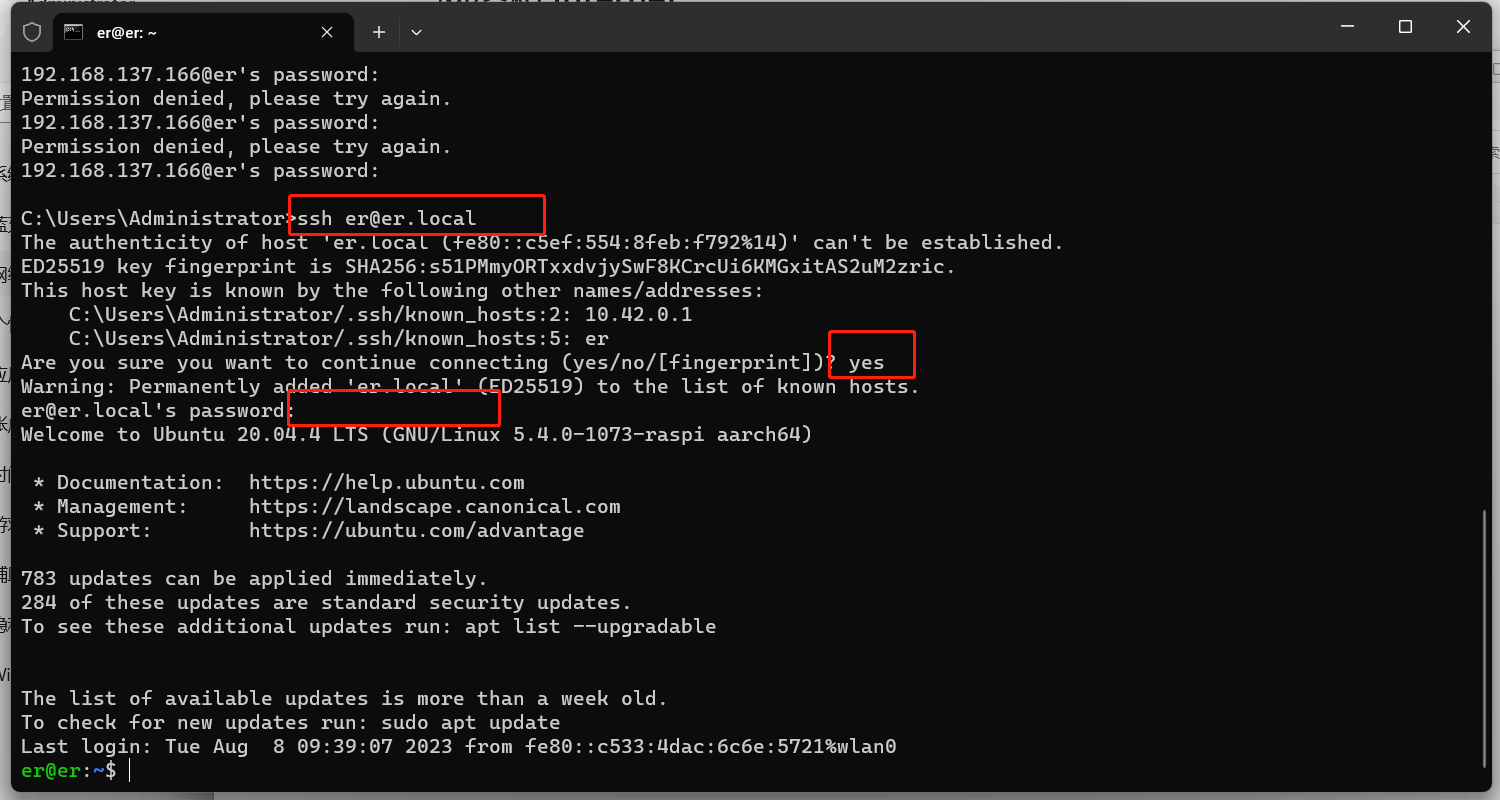
- 输入密码
Elephant,输入的密码不会显示出来,正常输入即可。 如上图所示,已成功远程ssh连接。如上图所示,已成功远程ssh连接机械臂
如何提高流畅性
- 远程连接流畅性取决于所连WiFi的流畅性,建议连接稳定的WiFi进行远程控制
6.语言配置
如何切换语言
点击桌面Language Support进入语言切换界面,拖拽想要更换的语言到最上方,重启系统即可
如何下载语言
点击桌面Language Support进入语言切换界面,选择语言,点击下载,输入密码Elephant
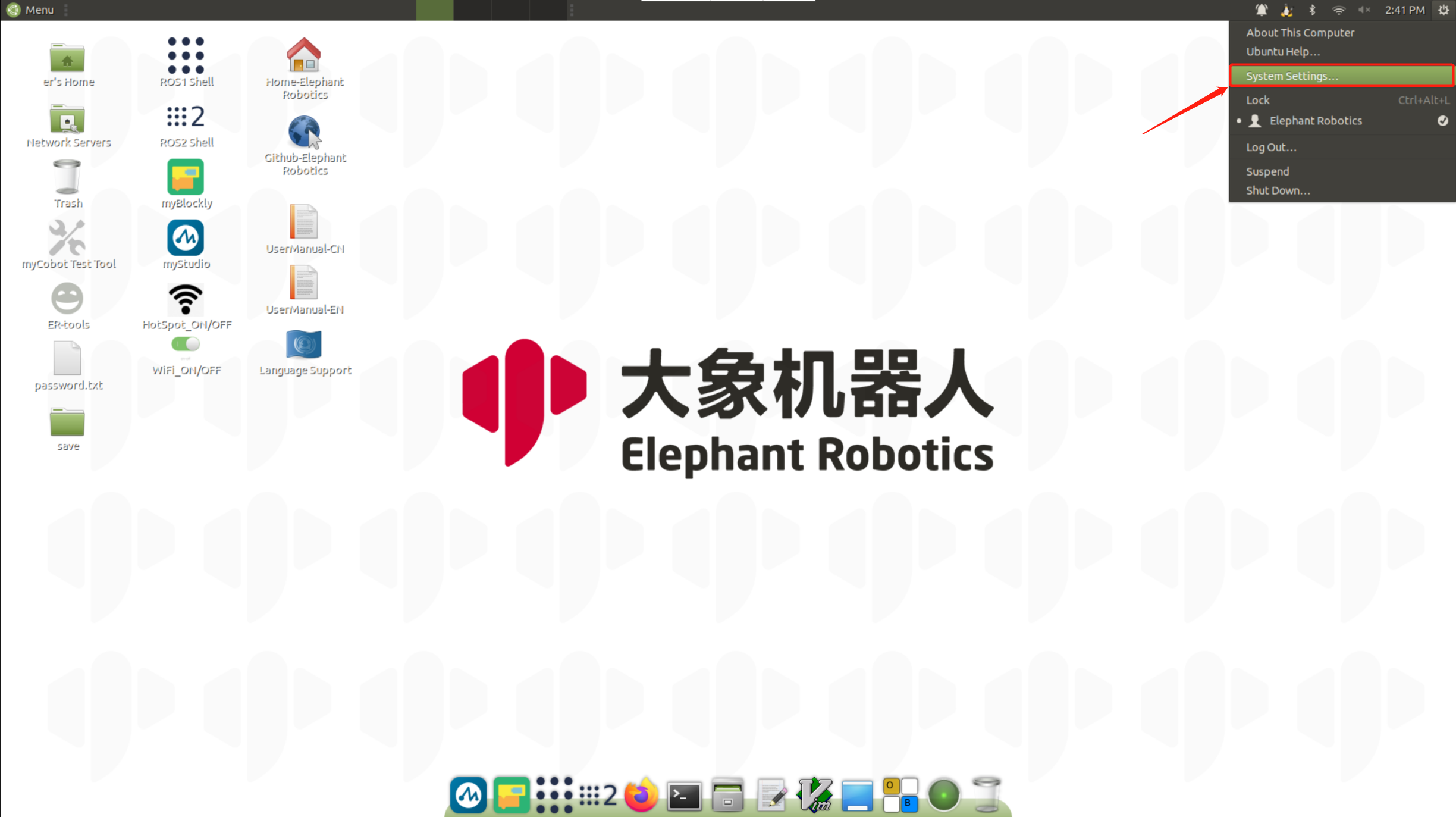
7.系统分辨率切换
点击屏幕右上角图标,选择 System Settings,进入系统控制面板
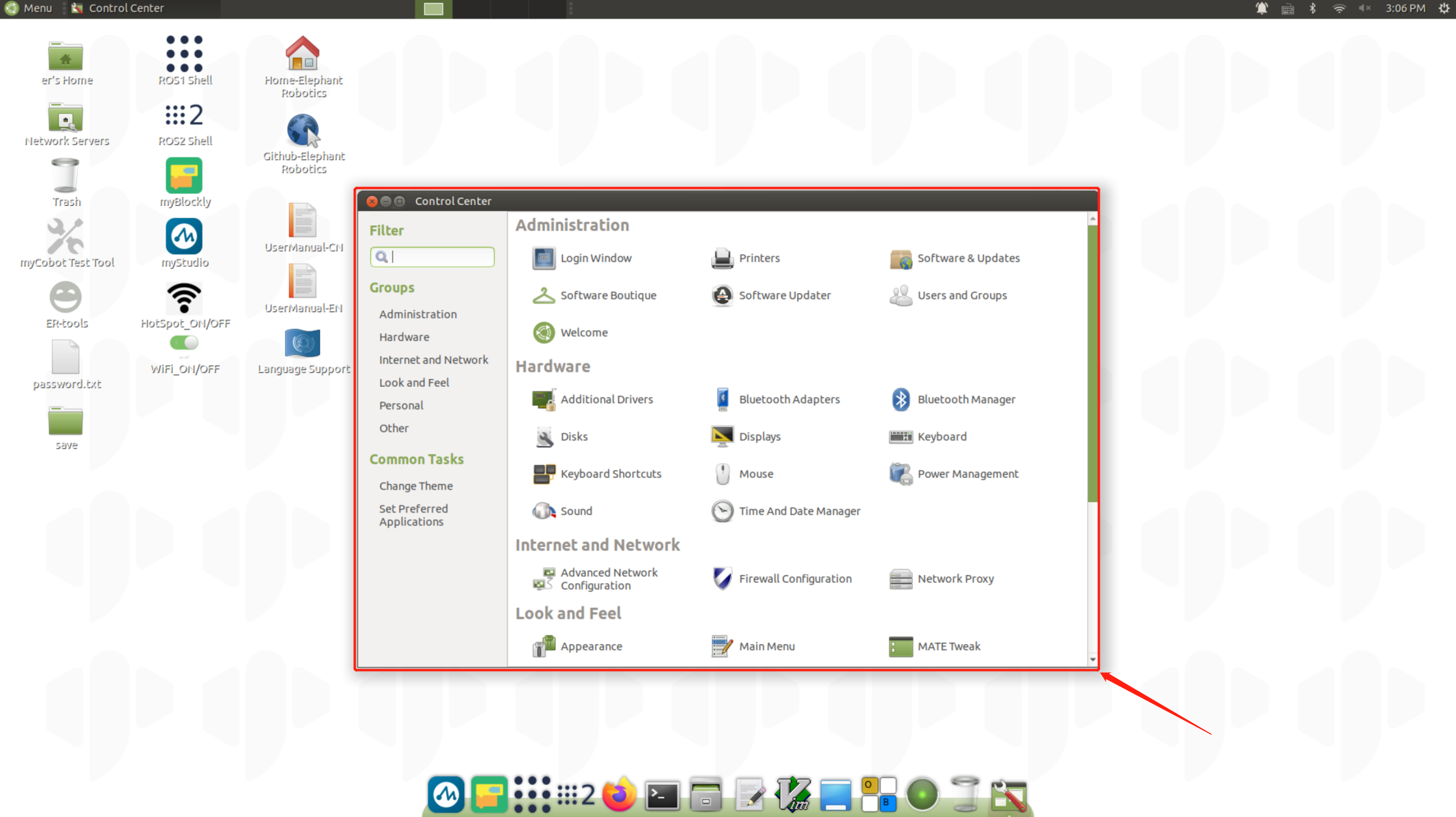
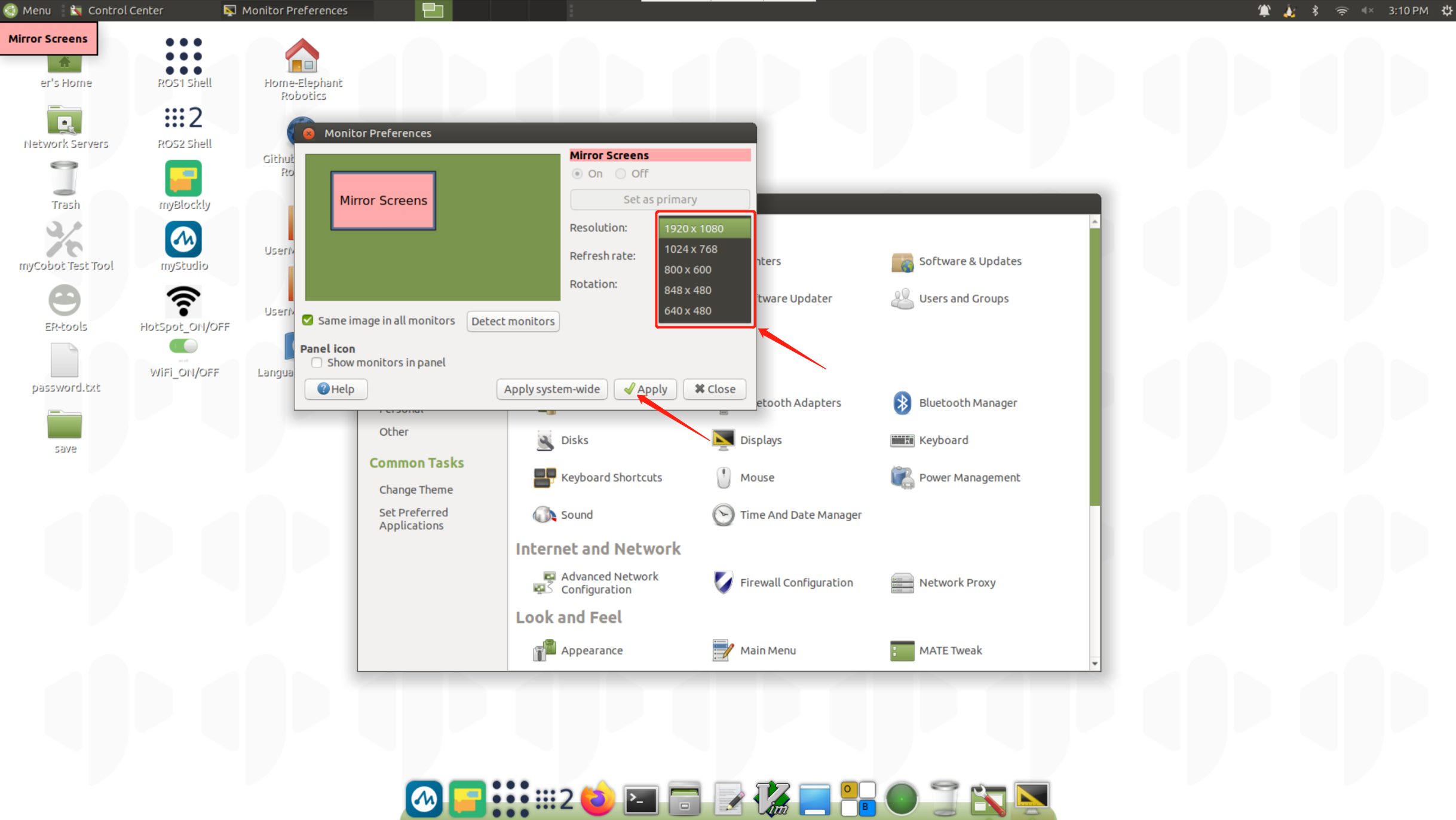
选择 Display,进入分辨率选择页面
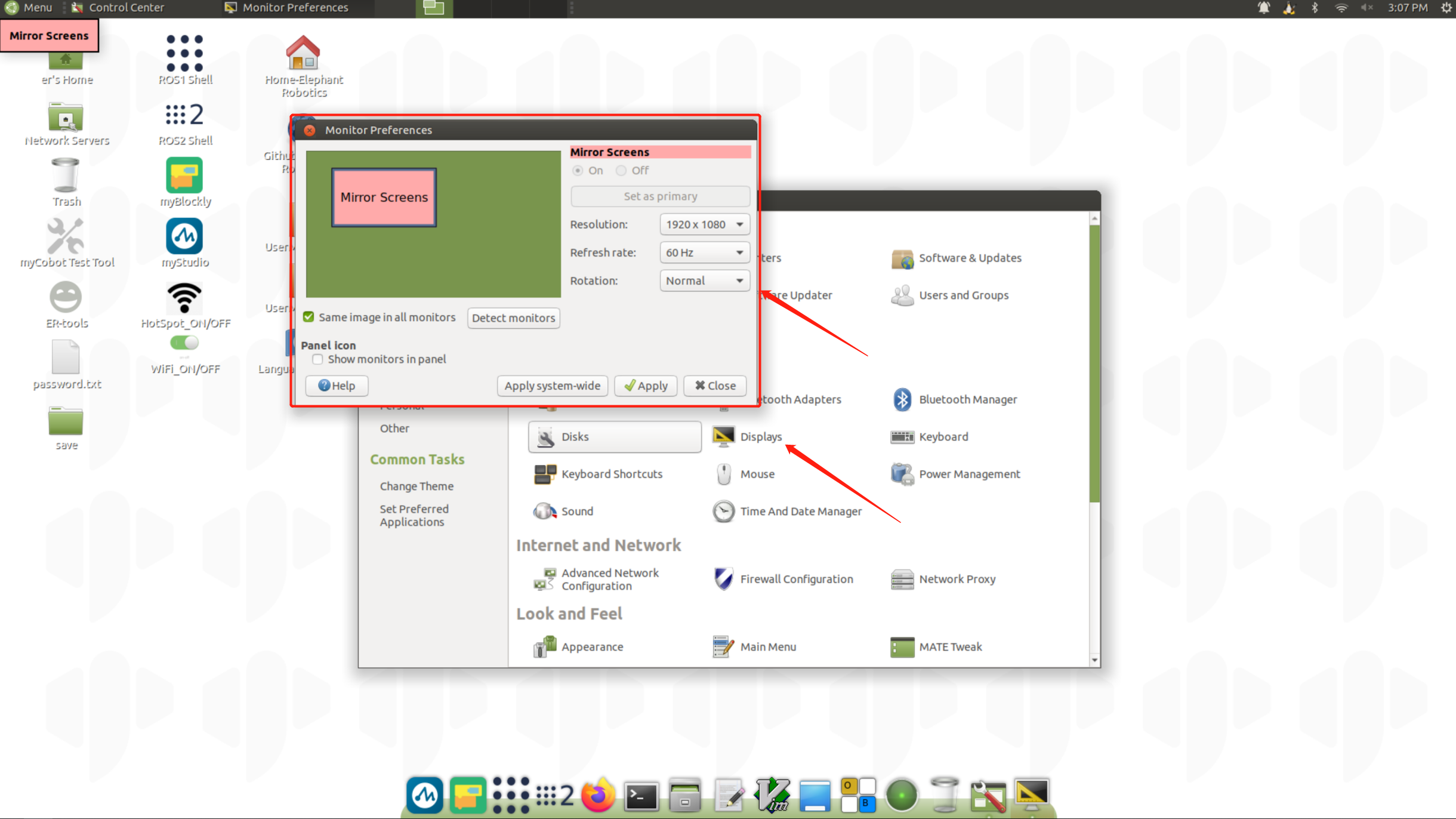
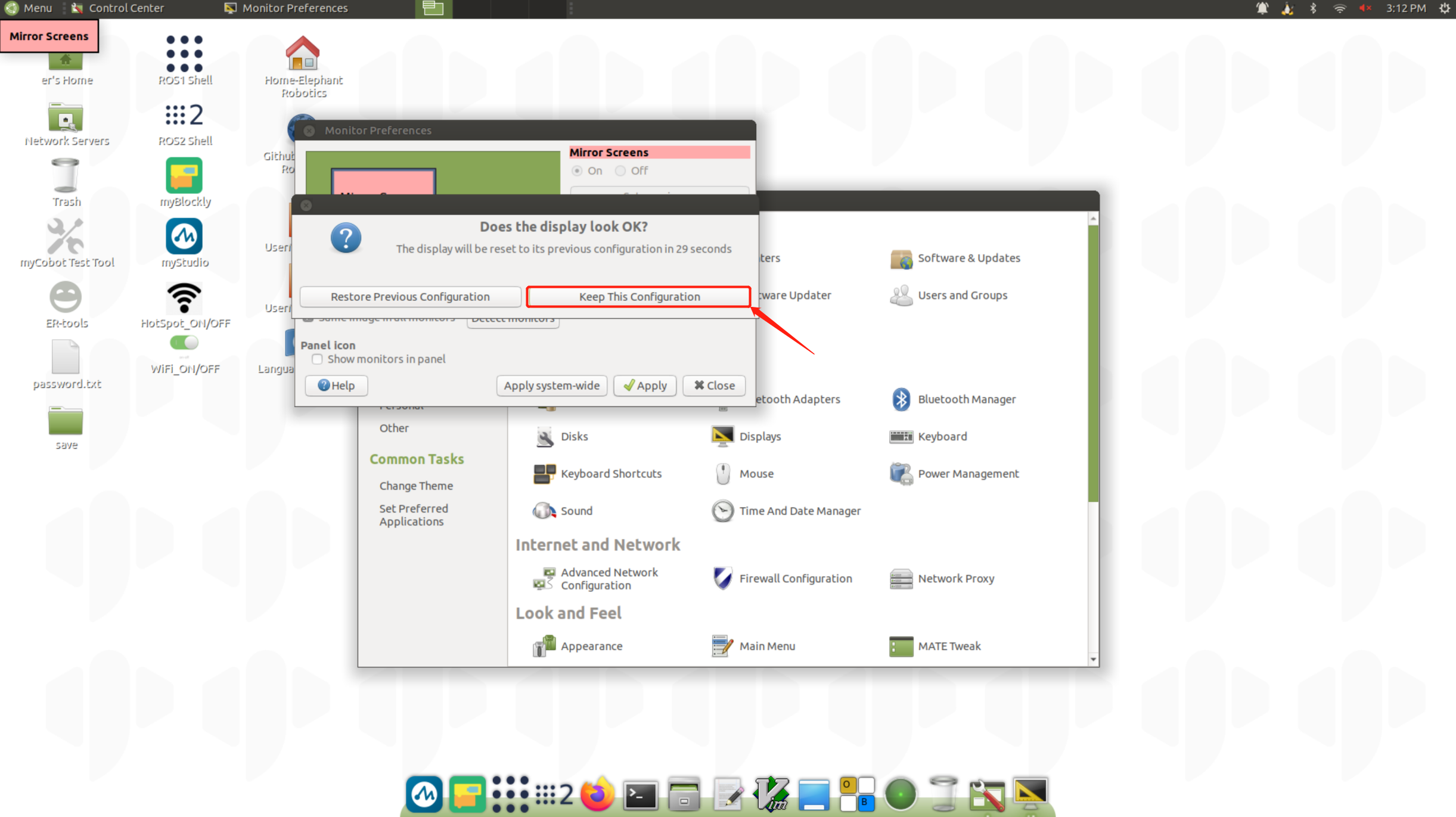
切换选择分辨率,点击 Apply 查看显示效果,如果符合,则点击 Keep this Configuration
8.python
机器人系统python简介
系统内置安装Python3.8 ,无需自行安装
已按照Python依赖:
| Package | Version |
|---|---|
| pymycobot | 3.1.6 |
| pyserial | 3.5 |
| numpy | 1.23.5 |
| opencv-contrib-python | 4.7.0.72 |
| rospkg | 1.4.0 |
| rospkg-modules | 1.4.0 |
初次使用python
同时按下
Ctrl+Alt+T三个键,打开Ubuntu系统终端在终端输入
python然后按下回车键,当终端中出现
>>>即表示已经进入python的编写环境。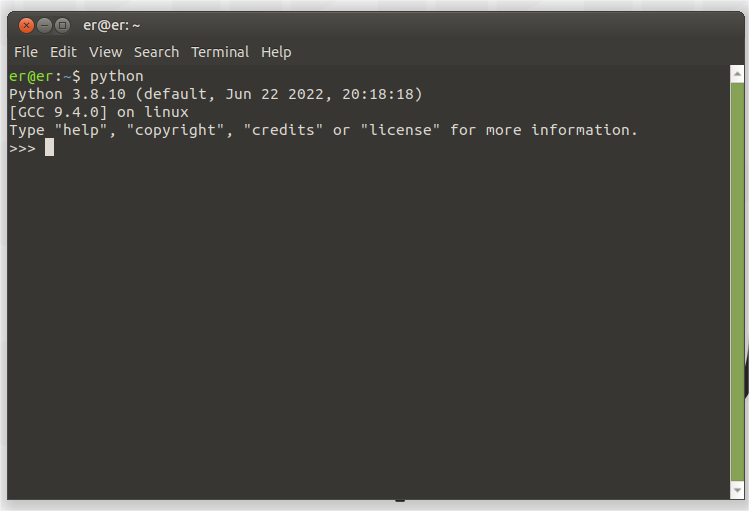 可在输入框中尝试此代码:
可在输入框中尝试此代码:print ("Hello World!")
运行机器人案例代码
具体案例代码可查看Python章节,直接将案例中代码复制下来即可使用