机器人参数说明
第一章中,我们探讨了产品的卖点及其设计理念,为您提供了对产品高层次理解的全景视角。现在,让我们进入第二章——机器人参数说明。这一章节将是您理解产品技术细节的关键。详细了解这些技术参数,不仅可以帮助您充分认识到我们产品的先进性和实用性,而且还能够确保您能够更有效地利用这些技术来满足您的具体需求。
1.机器人规格参数

| 指标 | 参数 |
|---|---|
| 名称 | 小象协作机械臂 |
| 型号 | myCobot 280 for M5 |
| 自由度 | 6 |
| 有效负载 | 250g |
| 工作半径 | 280mm |
| 重复定位精度 | ±0.5mm |
| 重量 | 800g |
| 电源输入 | 12V,5A |
| 工作温度 | -5-45℃ |
| 通信 | Type-C |
2.控制核心参数
2.1主控制器规格表
| 指标 | 参数 |
|---|---|
| 主控制 | M5Stack-basic |
| 主控型号 | ESP32 |
| CPU | 240MHz 双核心。 600 DMIPS、520KB SRAM。 Wi-Fi、双模式蓝牙 |
| 蓝牙 | 2.4G/5G |
| 无线 | 2.4G 3D Antenna |
| 输入 | 1, 2, 3, 5, 18, 19, 21, 22, 23, 25, 26, 35, 36 |
| 输出 | 同输入共用 |
| LCD 显示器 | 2.0" @ 320*240 ILI9342C IPS panel, maximum brightness 853nit |
| 实体按键 |
2.2辅助控制器规格表
| 指标 | 参数 |
|---|---|
| 辅助控制 | Atom |
| 辅助控制型号 | ESP32 |
| 辅助控制器核心参数 | 240MHz 双核。 600 DMIPS,520KB SRAM。 Wi-Fi、双模式蓝牙 |
| 辅助控制器闪光灯 | 4MB |
| LED矩阵 | 5*5 LED灯矩阵 |
| LCD 显示 | 2.0"@320*240 ILI9342C IPS 面板, 最大亮度 853nit |
| C 型 | *1 |
| 辅控扩展IO | G19, G21, G22, G23, G25, G33 |
3.结构尺寸参数
!本章以毫米为距离单位,以度为角度单位。
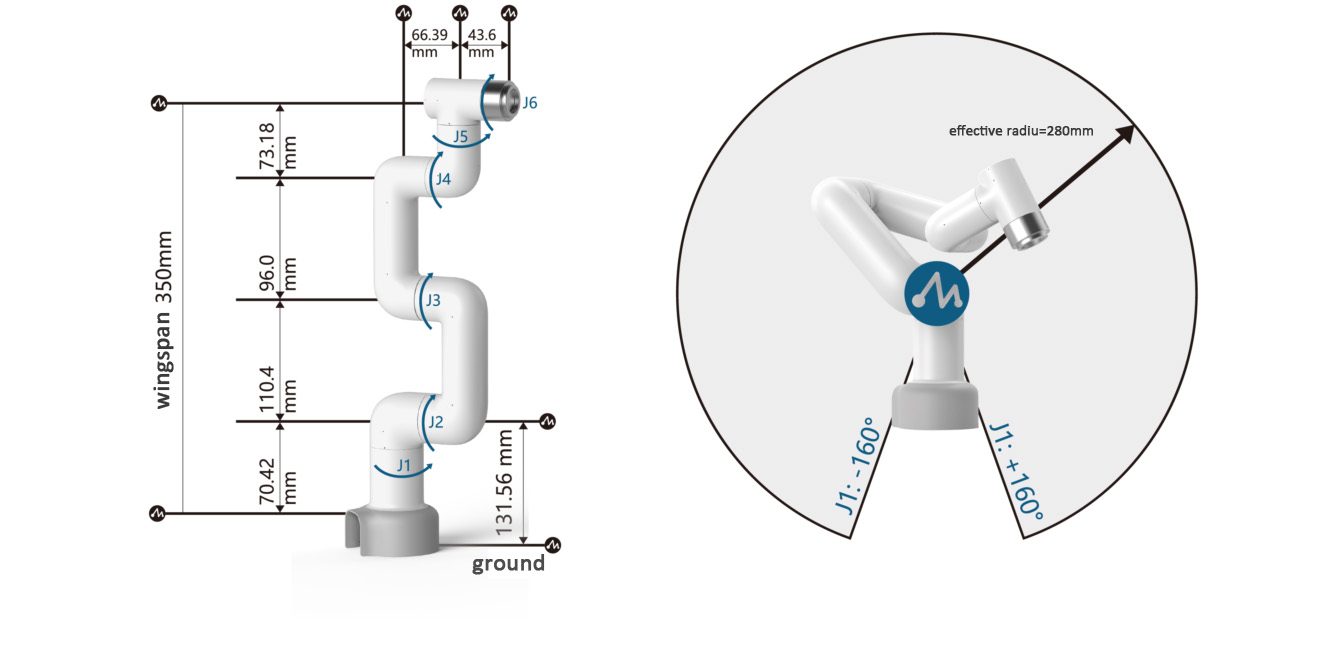
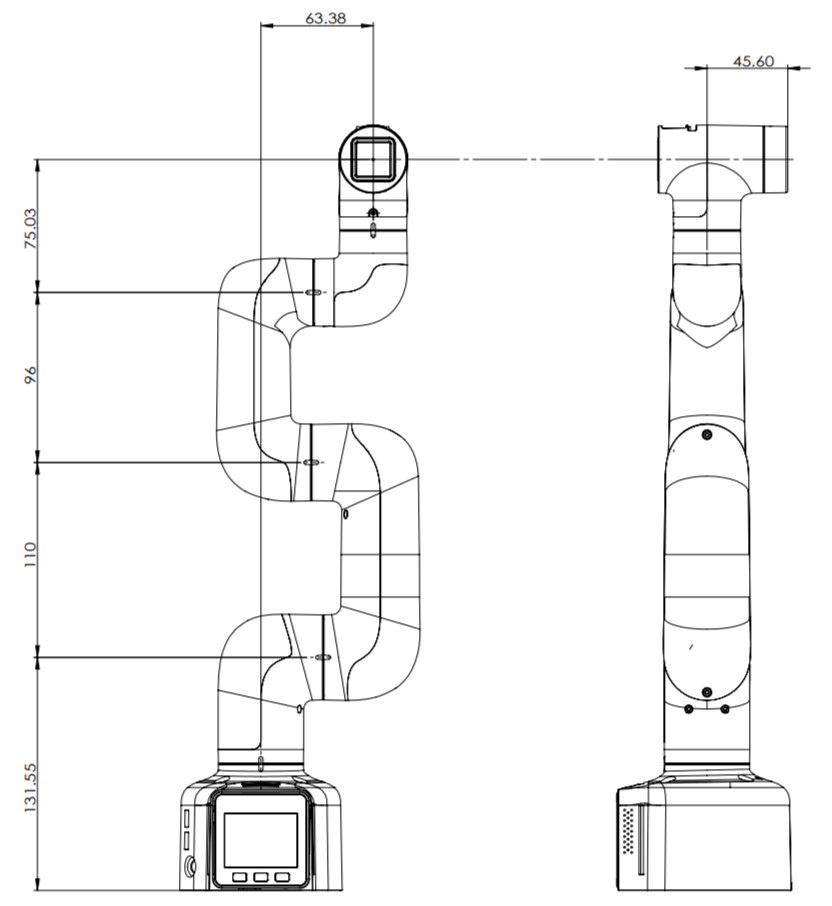
3.1 产品尺寸和工作空间
3.2 关节运动范围
注意:⚠ 该关节限位信息功能仅在 Atom 固件 ≥ 7.3 且 pymycobot 库 ≥ 4.0.2 时可用。
| 关节 | 范围 |
|---|---|
| J1 | -168 ~ +168 |
| J2 | -140 ~ +140 |
| J3 | -150 ~ +150 |
| J4 | -150 ~ +150 |
| J5 | -155 ~ +160 |
| J6 | -180 ~ +180 |
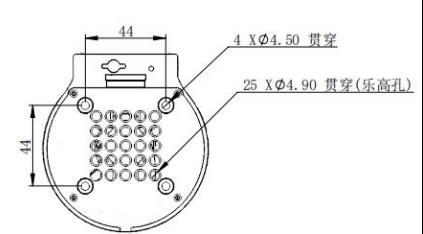
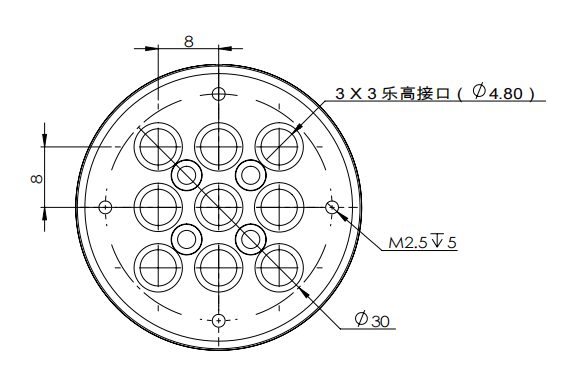
3.3 孔位安装
- 机器人底座安装法兰,底座同时兼容乐高科技件安装方式和M4螺丝安装方式。
- 机器人末端安装法兰,机械臂末端同时兼容乐高科技件孔与螺丝螺纹孔。
4.电气特性参数
4.1机械臂底座电气接口
底座介绍
A. 底座的正面如下图所示:
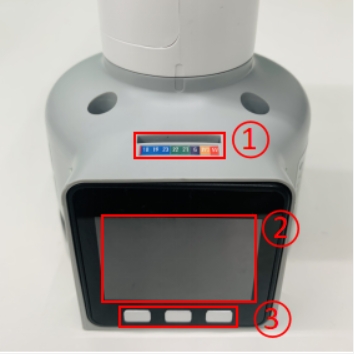
- ① 功能接口组一
- ② Basic显示屏
- ③ 按钮1 , 按钮2 , 按钮3
B. 底座的左侧面如下图所示:

- ① Grove 1 , Grove 2
- ② 电源DC接口
- ③ 功能接口组二
- ④ 复位按钮
- ⑤ Type C 接口
- ⑥ Grove 3
C. 底座的右侧面如下图所示:

① 功能接口组三
D. 底座的底部接口面如下图所示:

① 功能接口组四
4.2底座接口说明
注意: 功能接口组均为2.54mm杜邦接口,外部可使用2.54mm杜邦线。
- A. 功能接口组一与功能接口组四各个接口的定义一致,每个接口的定义如下表所示:
| 标签 | 信号名 | 类型 | 功能 | 备注 |
|---|---|---|---|---|
| 18 | G18 | I/O | GPIO18 | 在使用TF卡时不可用 |
| 19 | G19 | I/O | GPIO19 | 在使用TF卡时不可用 |
| 23 | G23 | I/O | GPIO23 | 在使用TF卡时不可用 |
| 22 | G22 | I/O | GPIO22 | |
| 21 | G21 | I/O | GPIO21 | |
| G | GND | P | GND | |
| 3V3 | 3V3 | P | DC 3.3V | |
| 5V | 5V | P | DC 5V |
- B. 功能接口组二与功能接口组三各个接口的定义一致,每个接口的定义如下表所示:
| 标签 | 信号名 | 类型 | 功能 | 备注 |
|---|---|---|---|---|
| 3 | G3 | I/O | GPIO3 | 在使用TypeC 或 Grove 2 时不可用 |
| 1 | G1 | I/O | GPIO1 | 在使用TypeC 或 Grove 2 时不可用 |
| 16 | G16 | I/O | GPIO16 | 暂不支持 |
| 17 | G17 | I/O | GPIO17 | 暂不支持 |
| 2 | G2 | I/O | GPIO2 | |
| 5 | G5 | I/O | GPIO5 | |
| 25 | G25 | I/O | GPIO25 | 暂不支持 |
| 26 | G26 | I/O | GPIO26 | 在使用Grove 1 时不可用 |
| 35 | G35 | I/O | GPIO35 | 暂不支持 |
| 36 | G36 | I/O | GPIO36 | 在使用Grove 1 时不可用 |
| RST | RST | - | Controller reset | 暂不支持 |
| BAT | BAT | - | BTTERY | 暂不支持 |
| 3V3 | 3V3 | P | DC 3.3V | |
| 5V | 5V | P | DC 5V | |
| G | GND | P | GND |
注意:
I: 仅作为输入。
I/O: 该功能信号包含输入和输出组合。
当管角设置为输出端时,它将输出电压3.3V。
1、单个管角的拉电流随管脚数量增加而减小,从约40mA减小到29mA。
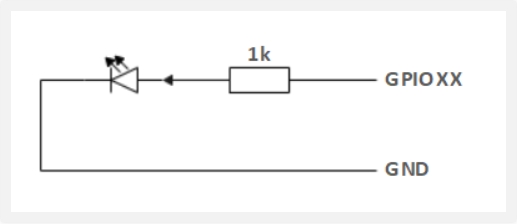
如果某个GPIO被设置为输出模式时,输出高电平信号,电路连接如图 2.1.1.2-5 所示,LED灯将点亮。
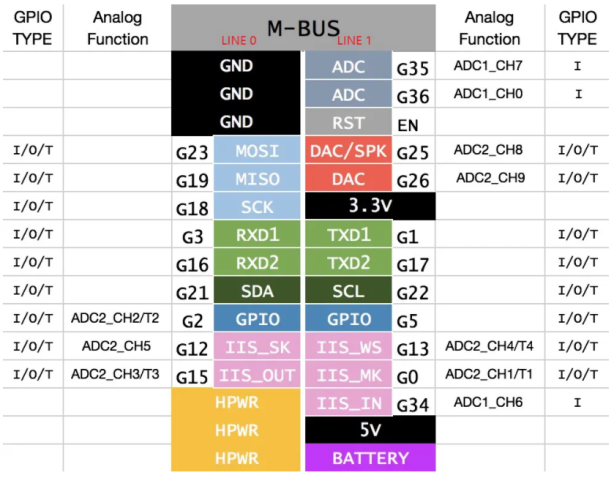
关于功能接口的其他功能表如下图所示,使用其他功能的情况下,IO功能不可用。
C. 电源DC接口:使用DC电源插座,外径6.5mm,内径2.0mm;可使用厂家配备的8.4V 5A DC电源适配器给 myCobot 280 进行供电。
D. Grove接口:Grove接口定义图A、图 B、图C 所示
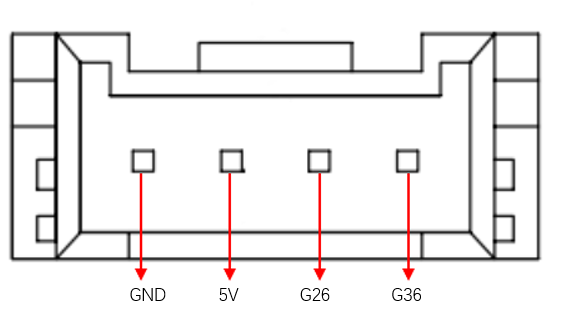
图 A Grove 1
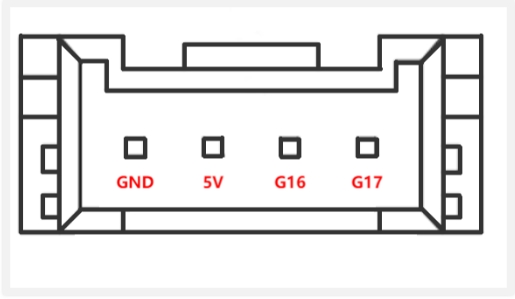
图 B Grove 2
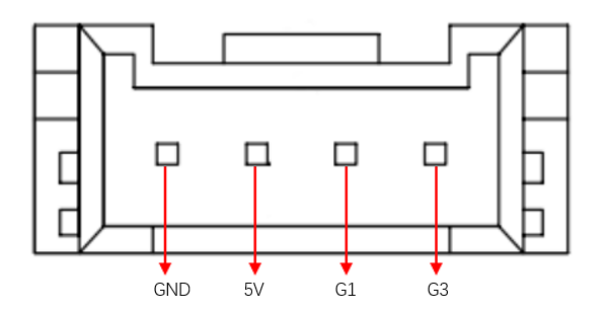
图 C Grove 3
E. Type C 接口:可用于和PC端连接通讯,使用该接口时,G1、G3接口被占用。
F. 复位按钮:用于主控系统复位时使用。
G. 按钮A、按钮B和按钮C:配合显示屏进行功能操作使用。
H. 显示屏:使用2 inch的IPS屏幕,可用于显示 myCobot 通讯状态/配合按钮校正机器人原点等功能。
4.3机械臂末端电气接口
机械臂末端介绍
A. 机械臂末端如图 D和图 E 所示:

图 D 机械臂末端
- ① 舵机接口
- ② Atom

图 E 机械臂末端
- ① 功能接口组五
- ② Grove 4
- ③ Type C
末端接口说明
- A. 功能接口组五各个接口的定义如下表所示:
| 标签 | 信号名 | 类型 | 功能 | 备注 |
|---|---|---|---|---|
| 5V | 5V | P | DC 5V | |
| GND | GND | P | GND | |
| 3V3 | 3V3 | P | DC 3.3V | |
| G22 | G22 | I/O | GPIO22 | |
| G19 | G19 | I/O | GPIO19 | |
| G23 | G23 | I/O | GPIO23 | |
| G33 | G33 | I/O | GPIO33 |
注意:
I: 仅作为输入。
I/O: 该功能信号包含输入和输出组合。
当管角设置为输出端时,它将输出电压3.3V。
1、单个管角的拉电流随管脚数量增加而减小,从约40mA减小到29mA。
如果某个GPIO被设置为输出模式时,输出高电平信号,电路连接如下图 所示,LED灯将点亮。
B. Type C接口:可用于和PC端连接通讯,更新固件使用。
C. Grove 4: 定义如图F 所示
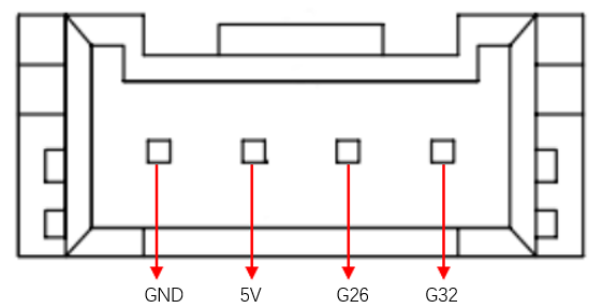
图 F Grove 4
D. 舵机接口:用于末端拓展夹爪时使用,当前支持配套的自适应夹爪使用。
E. Atom:用于 5X5 RGB LED(G27)显示和按键功能(G39)
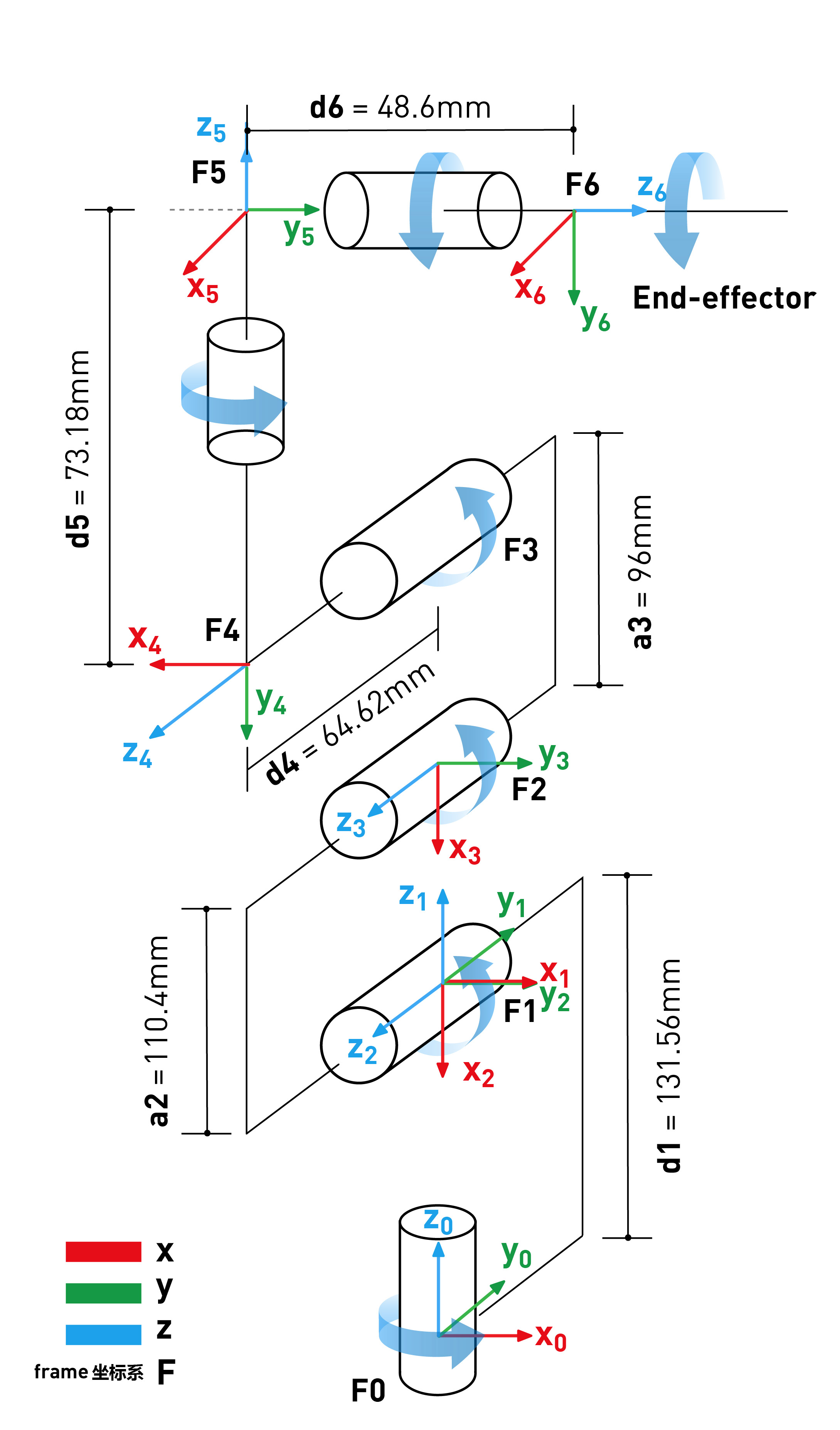
5.笛卡尔坐标参数