夹爪控制
夹爪安装:
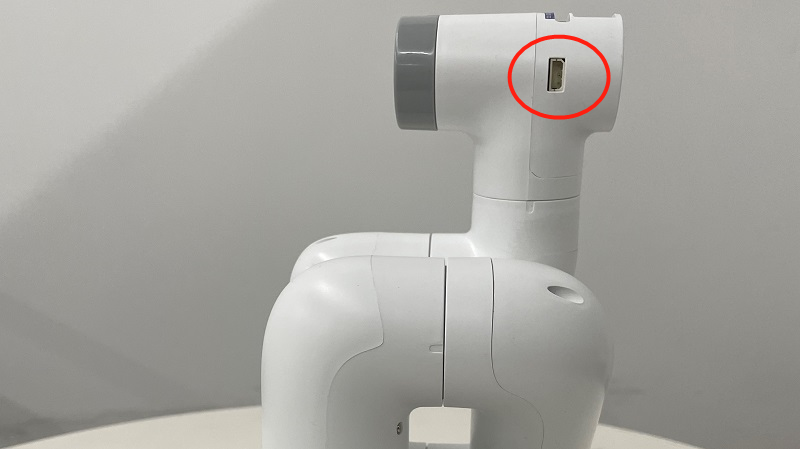
自适应夹爪将夹爪插在atom上面的引脚上,具体看下图:
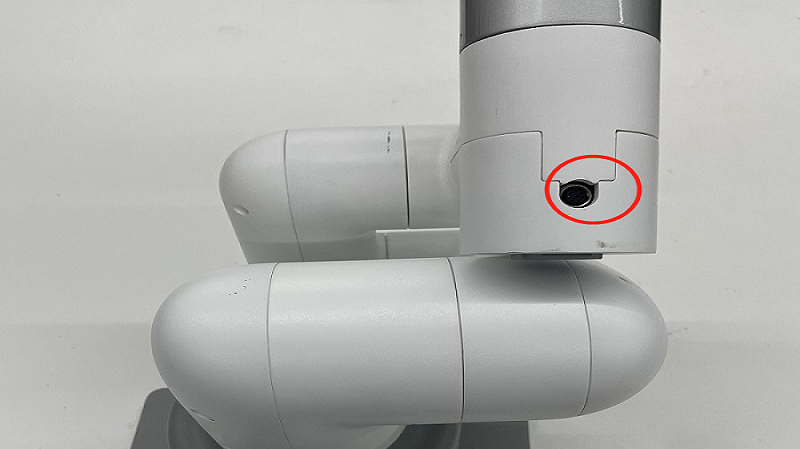
电动夹爪插在顶端上的接口处,具体看下图:
注意:myCobot280和myPalletizer 260没有电动夹爪,只有myCobot320有电动夹爪。
自适应夹爪控制
支持设备:myCobot280、320&&myPalletizer 260
1.1 setGripperValue(byte angle, byte speed)
返回值:无
参数说明:参数1:夹爪开合角度(0-100,0--闭合,100-张开最大角度),参数2:夹爪开合速度(0-100)
案例:
mc.setGripperValue(0, 10);
Thread.Sleep(3000);
mc.setGripperValue(50, 100);
Thread.Sleep(3000);
1.2 getGripperValue()
返回值:int类型,返回夹爪角度(0--闭合,100-张开最大角度)
参数说明:无
案例:
Console.WriteLine(mc.getGripperValue());
完整使用案例
这段 C# 代码用于控制 MyCobot 机械臂的夹爪(gripper)和电动夹爪(electric gripper)。程序通过串口连接到 MyCobot 机械臂,执行一系列操作,包括打开和关闭夹爪、电动夹爪的状态切换以及读取夹爪的当前状态。程序在操作完成后关闭串口连接。
using System;
using System.Threading;
namespace Mycobot.csharp
{
class Test
{
static void Main(string[] args)
{
// 初始化 MyCobot 对象,并指定串口名称(Windows 下为 "COM57",树莓派下为 "/dev/ttyAMA0")
MyCobot mc = new MyCobot("COM57");
// 打开与 MyCobot 机械臂的串口连接
mc.Open();
// 等待 5 秒,以确保 Windows 环境下串口打开后,MyCobot 底层系统重新启动并准备就绪
Thread.Sleep(5000);
// 控制夹爪打开或关闭,设置夹爪位置为 0 (关闭),速度为 10
mc.setGripperValue(0, 10);
// 等待 3 秒,以确保夹爪操作完成
Thread.Sleep(3000);
// 设置夹爪位置为 50,速度为 100,夹爪部分打开
mc.setGripperValue(50, 100);
// 等待 3 秒,以确保夹爪操作完成
Thread.Sleep(3000);
// 控制电动夹爪关闭
mc.setEletricGripper(0);
// 等待 100 毫秒
Thread.Sleep(100);
// 控制电动夹爪打开
mc.setEletricGripper(1);
// 等待 100 毫秒
Thread.Sleep(100);
// 获取夹爪的当前状态(0 表示关闭,1 表示打开),并输出状态
Console.WriteLine(mc.getGripperValue());
// 关闭与 MyCobot 机械臂的串口连接
mc.Close();
}
}
}