电脑控制
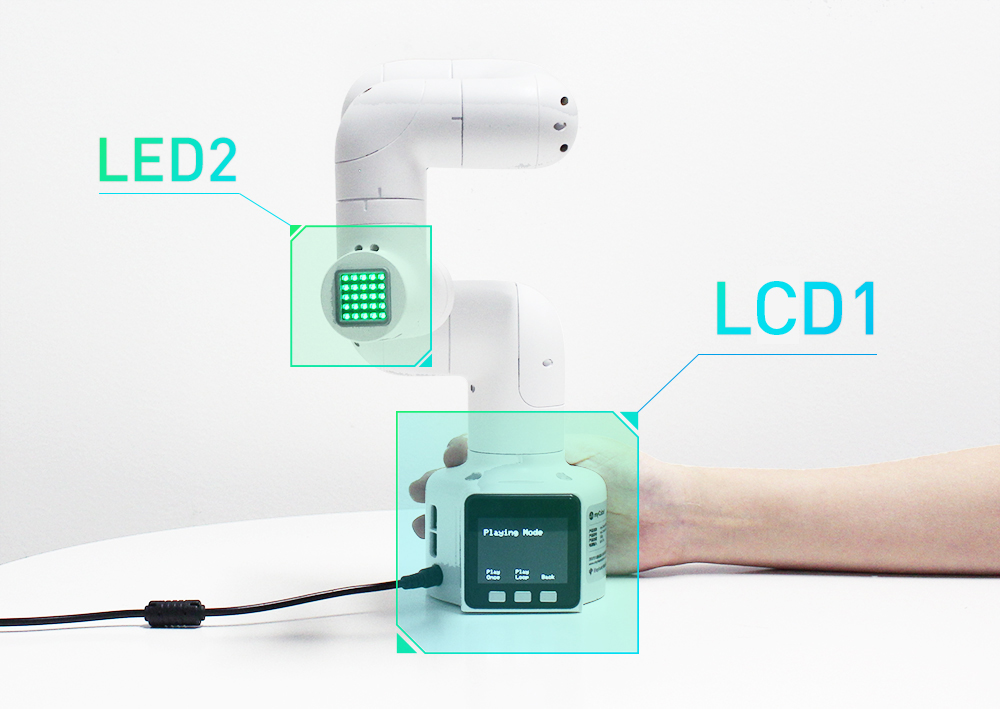
电脑控制的时效性对于微控制器机械臂至关重要。对于微控制器机械臂来说,我们通常对底座的 Basic 发送控制指令,通过电脑控制转发,末端执行器将对指令进行解析,继而执行目标动作。
该功能现主要用于客户在不同环境下自行开发机械臂。
设备类型不同,操作方式也有所不同,大概步骤如下:
- Atom烧录最新版的atomMain
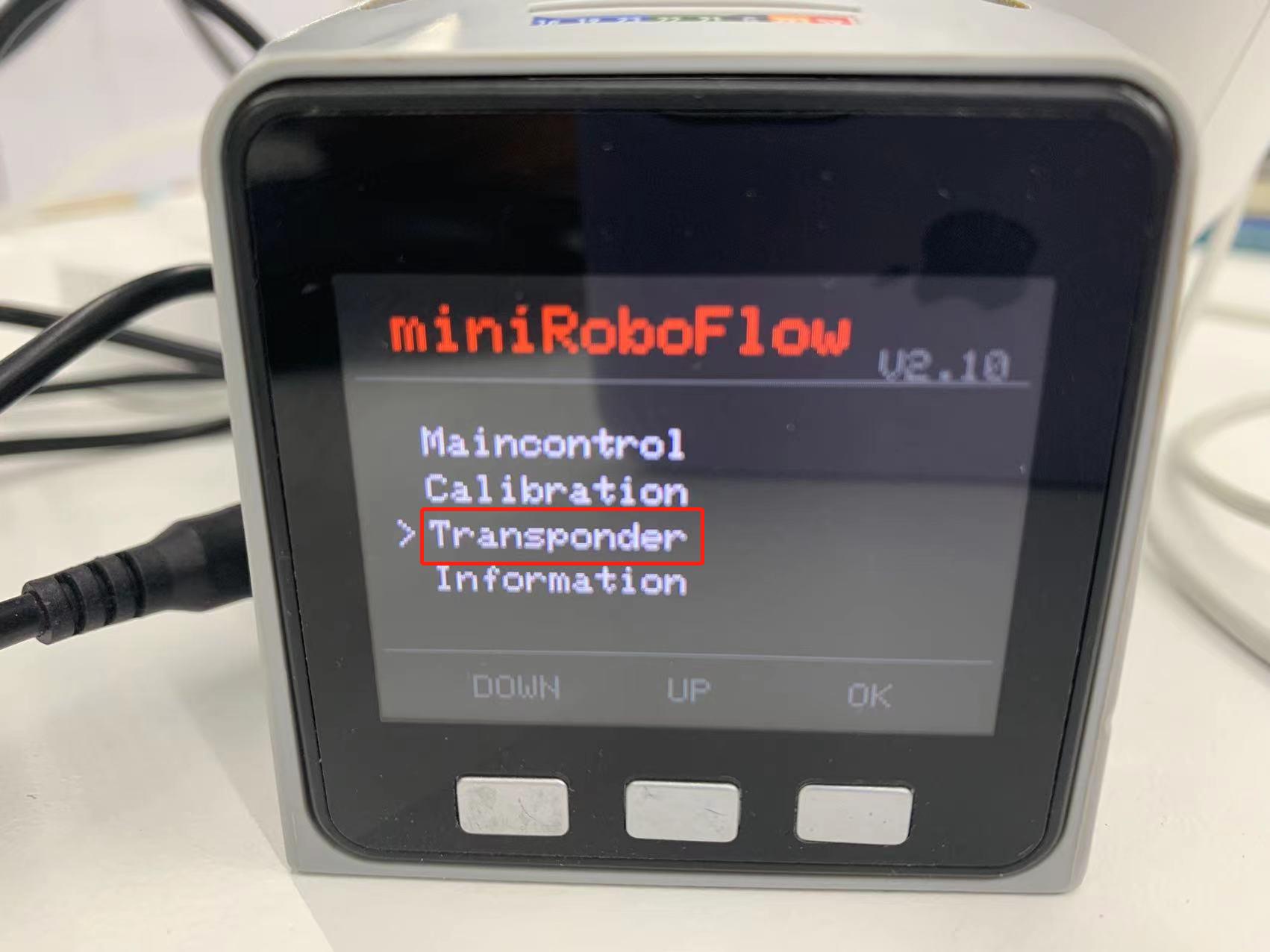
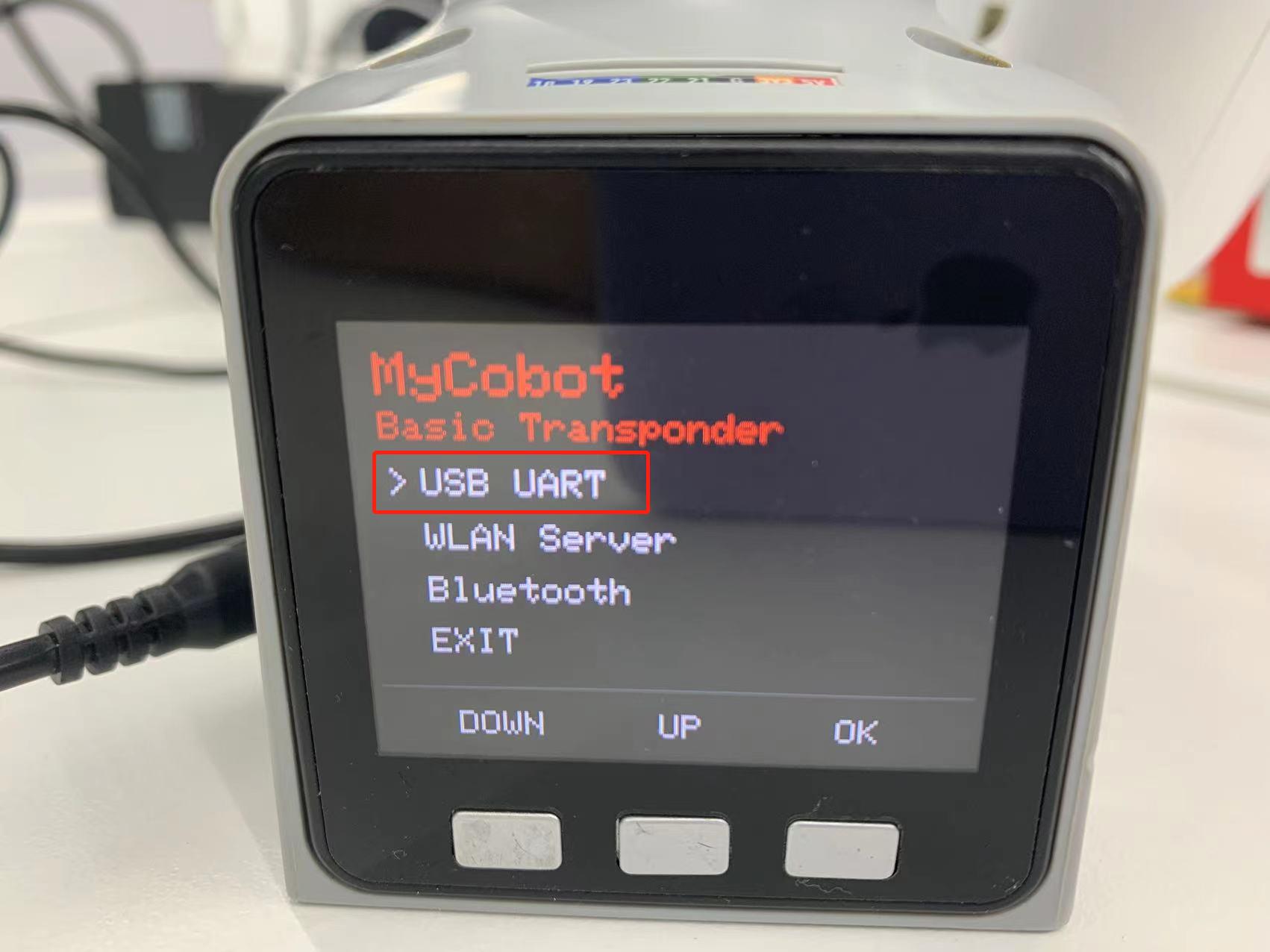
- M5Stack-basic烧录minirobot,选择Transponder功能
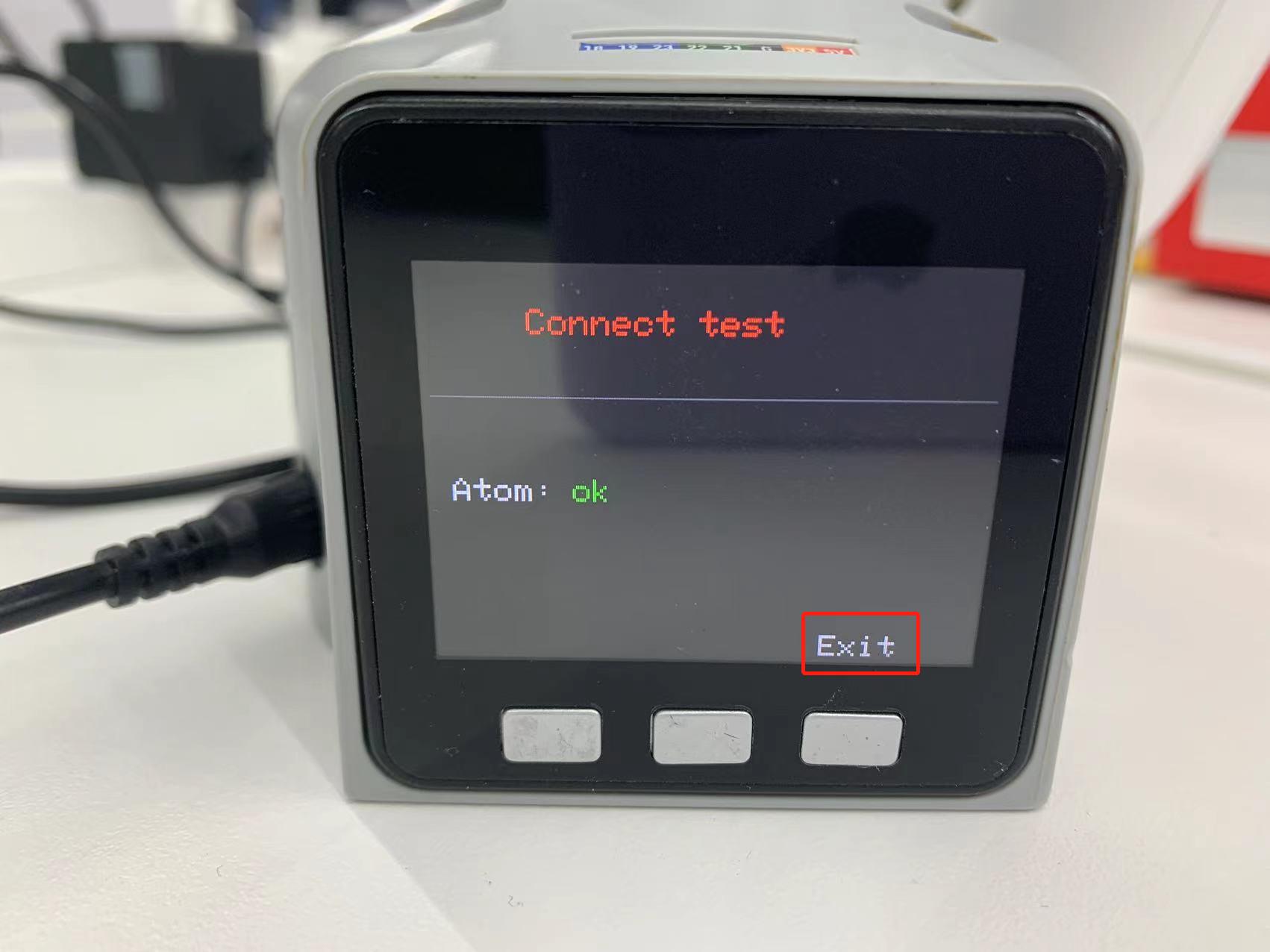
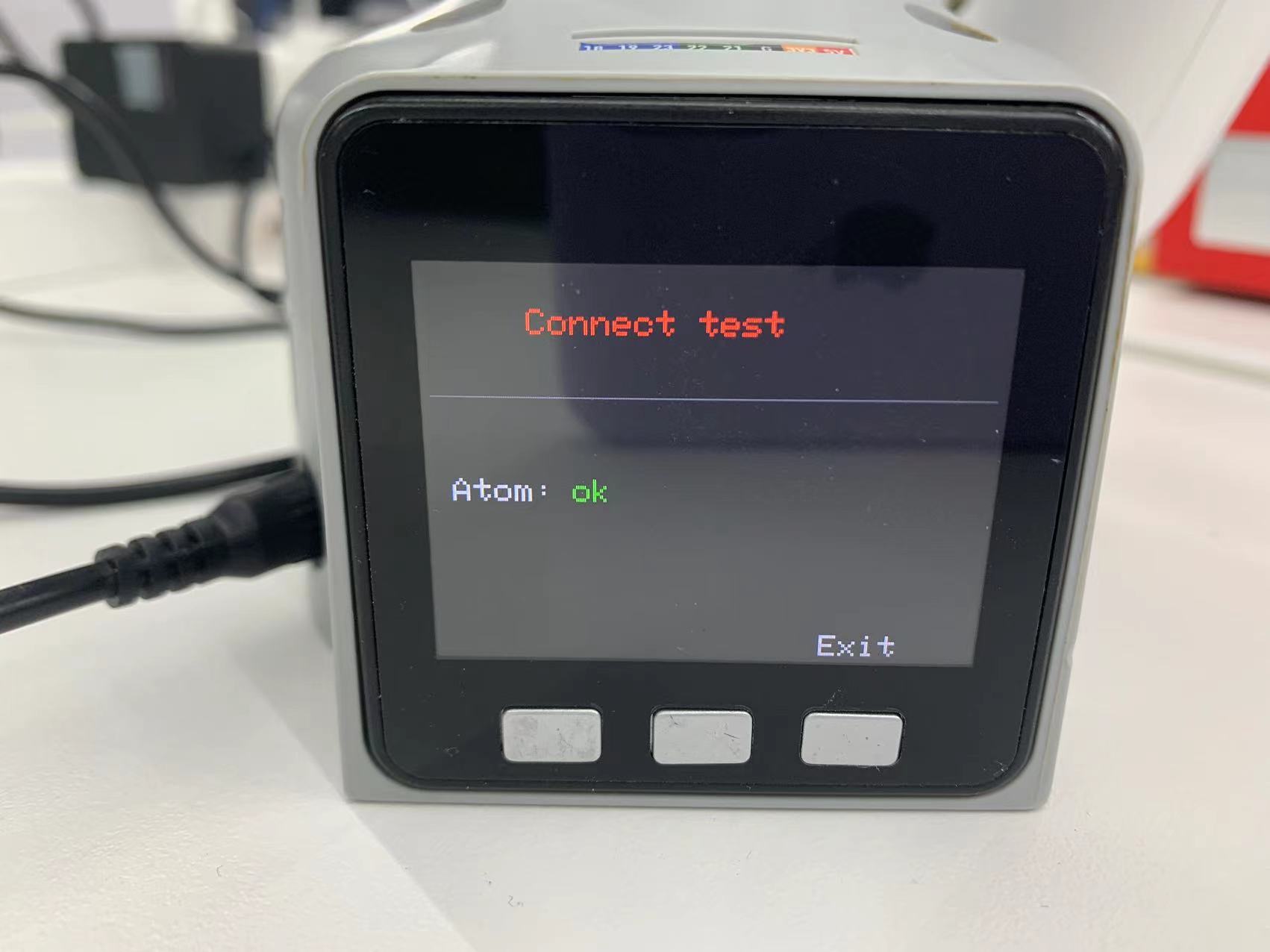
- 按下检测键,检测 Basic 和末端执行器 Atom 是否正常通讯
- 按下退出按钮,退出此功能
本节,我们可以实时检测 Basic 和末端执行器 Atom 是否正常通讯。
实现通讯转发
适用设备
- myCobot 280 M5
- myCobot 320 M5
- myPalletizer 260 M5
- mechArm 270 M5
操作步骤
Step 1: Atom烧录最新版的atomMain。
Step 2: M5Stack-basic烧录minirobot,选择Transponder功能。
Step 3: 检测Atom的连接(ok表示连接正常,否则显示no)。
Step 4: 点击Exit退出此功能。