Control of the robotic arm
1 Enable TCP server function
1.1 Log in to RoboFlow operating system
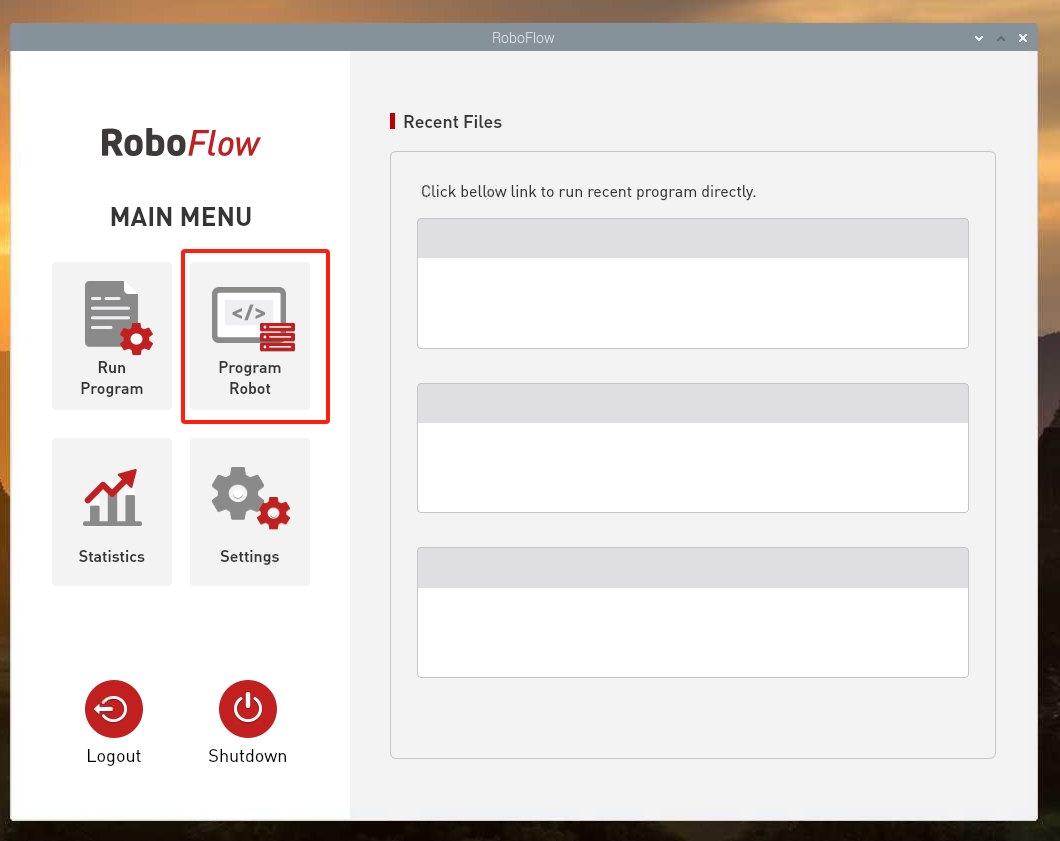
After the robot is powered on, use VNC Viewer to enter the Raspberry Pi and log in to the RoboFlow operating system.
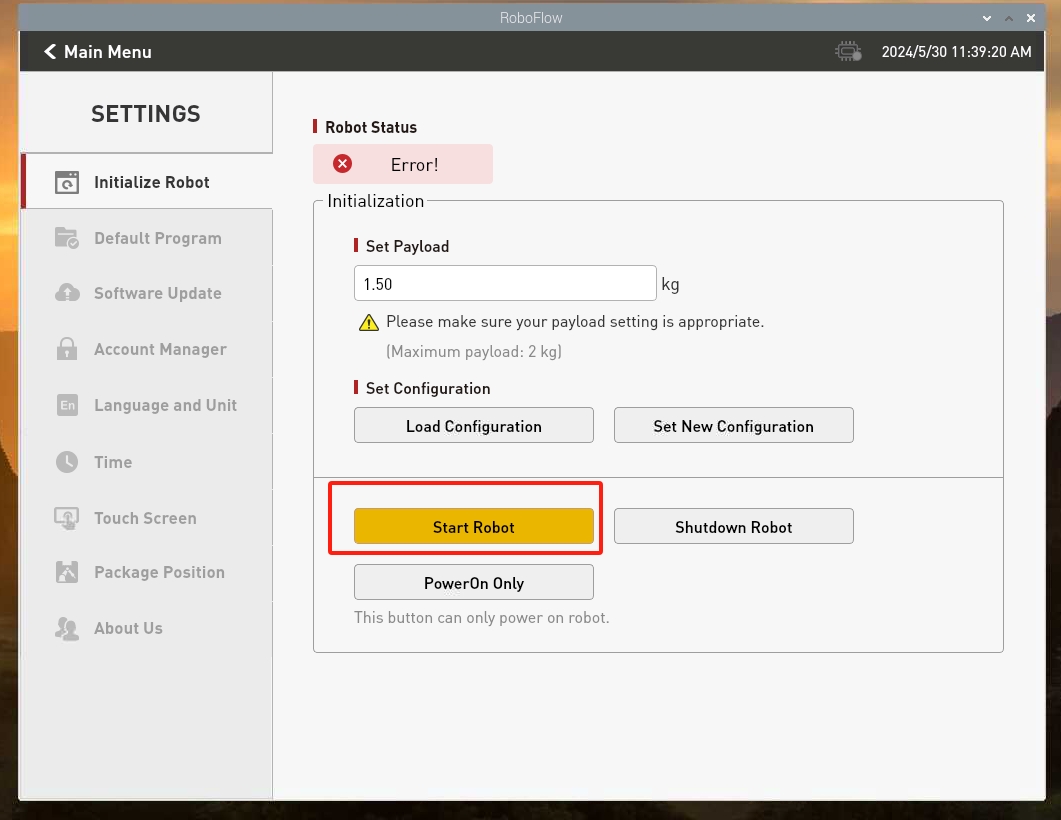
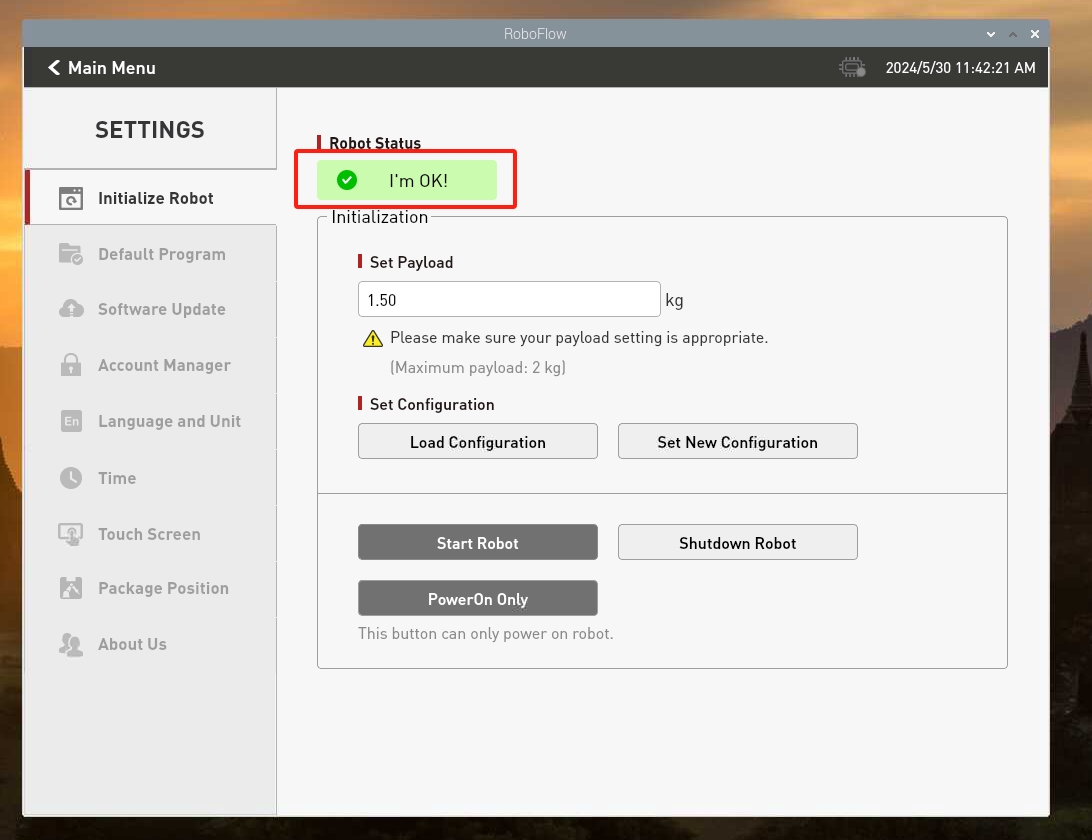
1.2 Start the robot
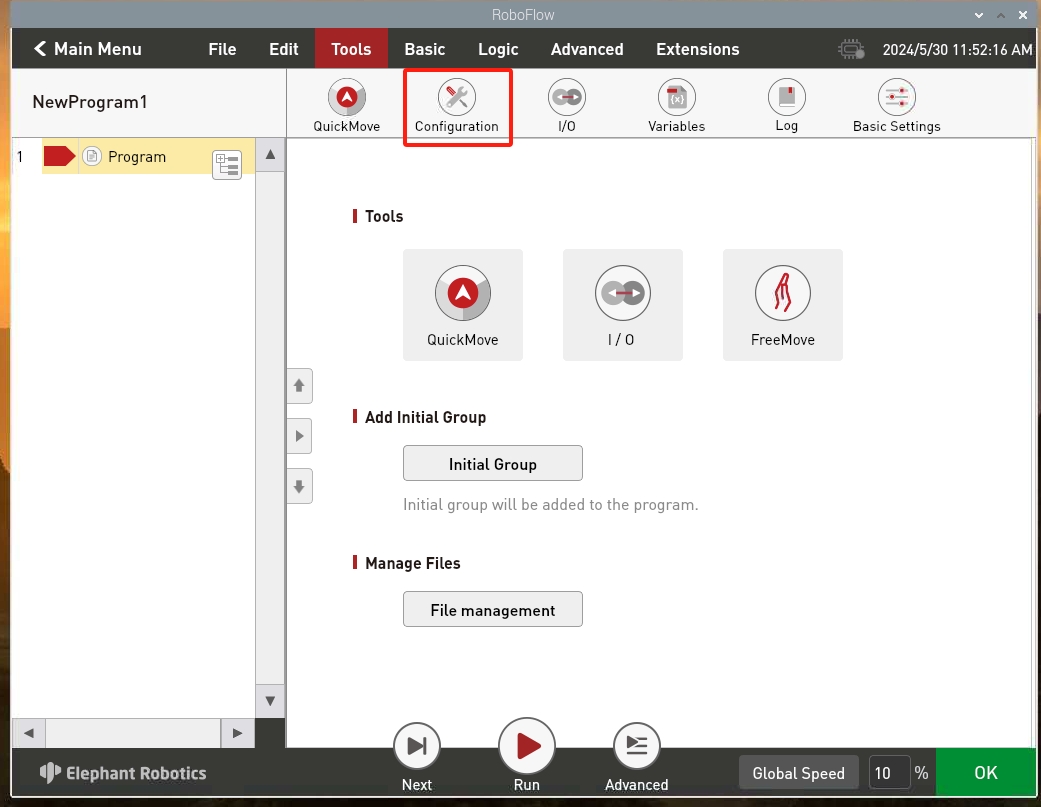
Enter the configuration center and click the Start Robot button
1.3 Check whether the TCP server is open
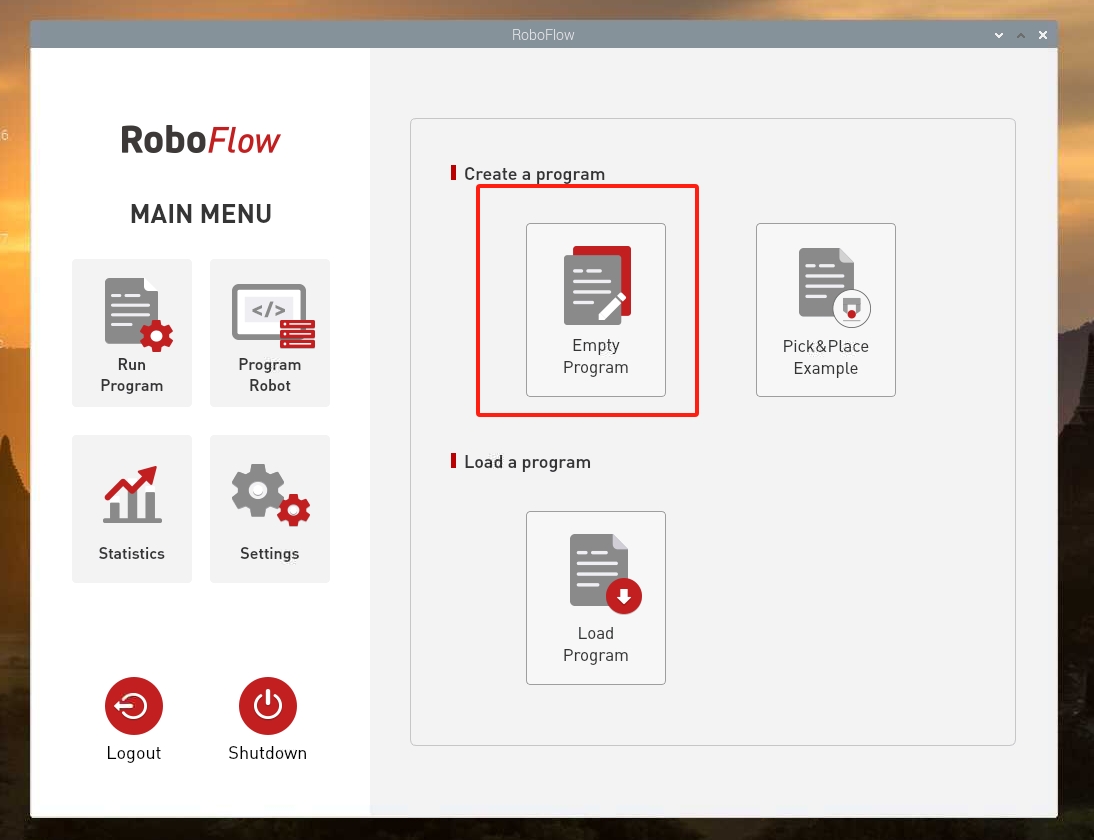
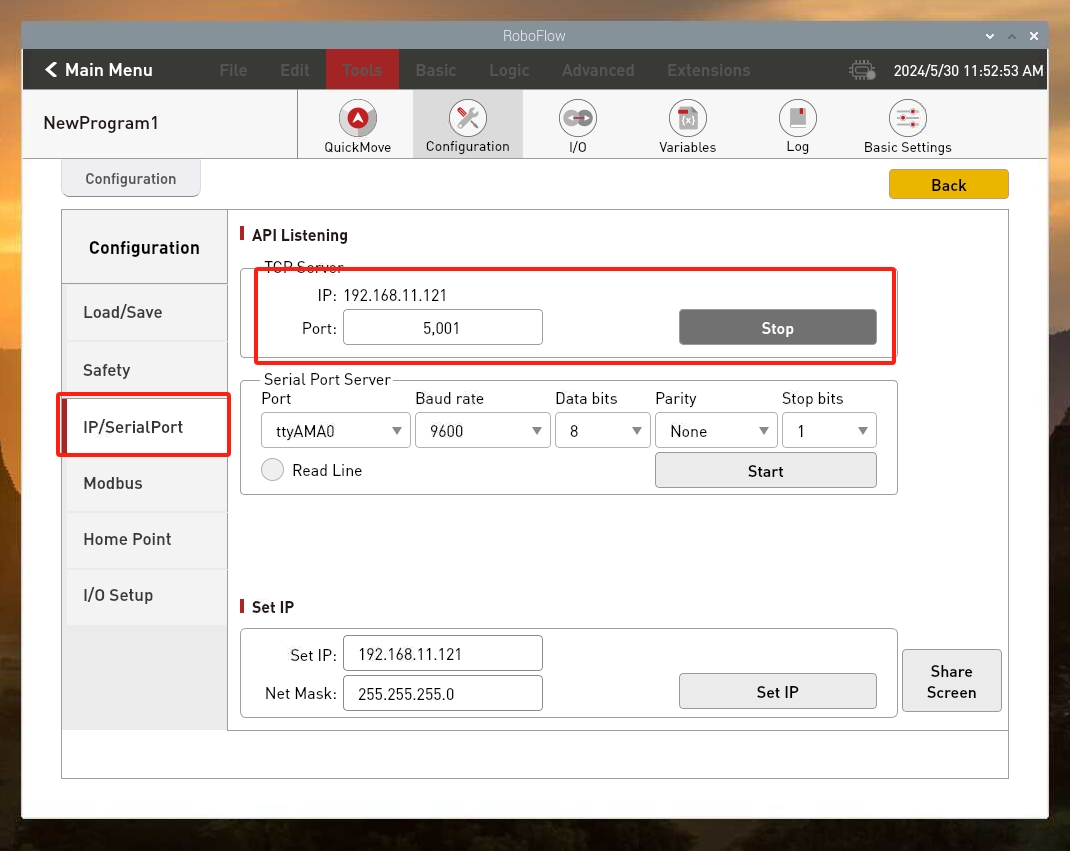
Return to the main menu, click Write Program, and then click the blank program. After entering the program editing interface, click the Configuration button, click the Network/Serial Port option, and check whether the TCP server is turned on. Normally, TCP server is turned on by default , if it is not turned on, you need to turn it on manually and set the IP address manually, such as setting it to 192.168.1.159.
2 Slider control
Note: TCP communication needs to ensure that the local virtual machine computer and the MyCobot Pro630 system use the same network and the same network segment.
Open a console terminal and run the command:
roslaunch mycobot_630 mycobot_630_slider.launch
It will open rviz and a slider component, and you will see something like this:
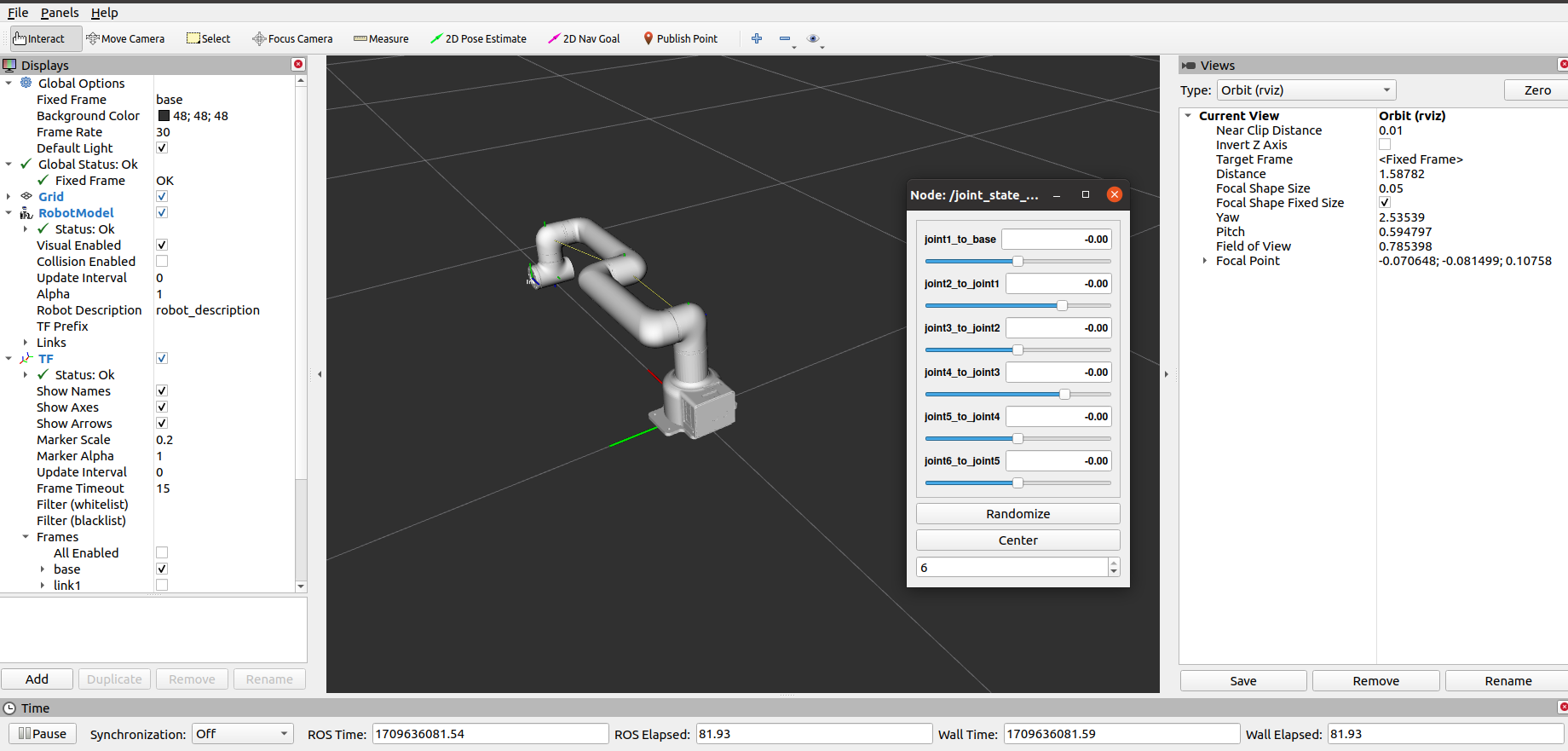
You can then control the movement of the model in rviz by dragging the slider. If you want the real MyCobot Pr630 to move along with it, you need to open another console terminal and run the command:
# The default Socket IP address of MyCobot Pro 630 is 192.168.1.159 and the port number is 5001. If it is inconsistent, it can be modified according to the actual IP address.
rosrun mycobot_630 mycobot_630_slider.py _ip:=192.168.1.159 _port:=5001
Please note: Since the robot arm will move to the current position of the model when the command is entered, please make sure that the model in rviz does not have mold penetration before you use the command. Do not quickly drag the slider after connecting the robotic arm to prevent damage to the robotic arm.
3 Moveit usage
mycobot_630 now has the MoveIt part integrated.
Open a console terminal (shortcut key Ctrl+Alt+T) and run the command:
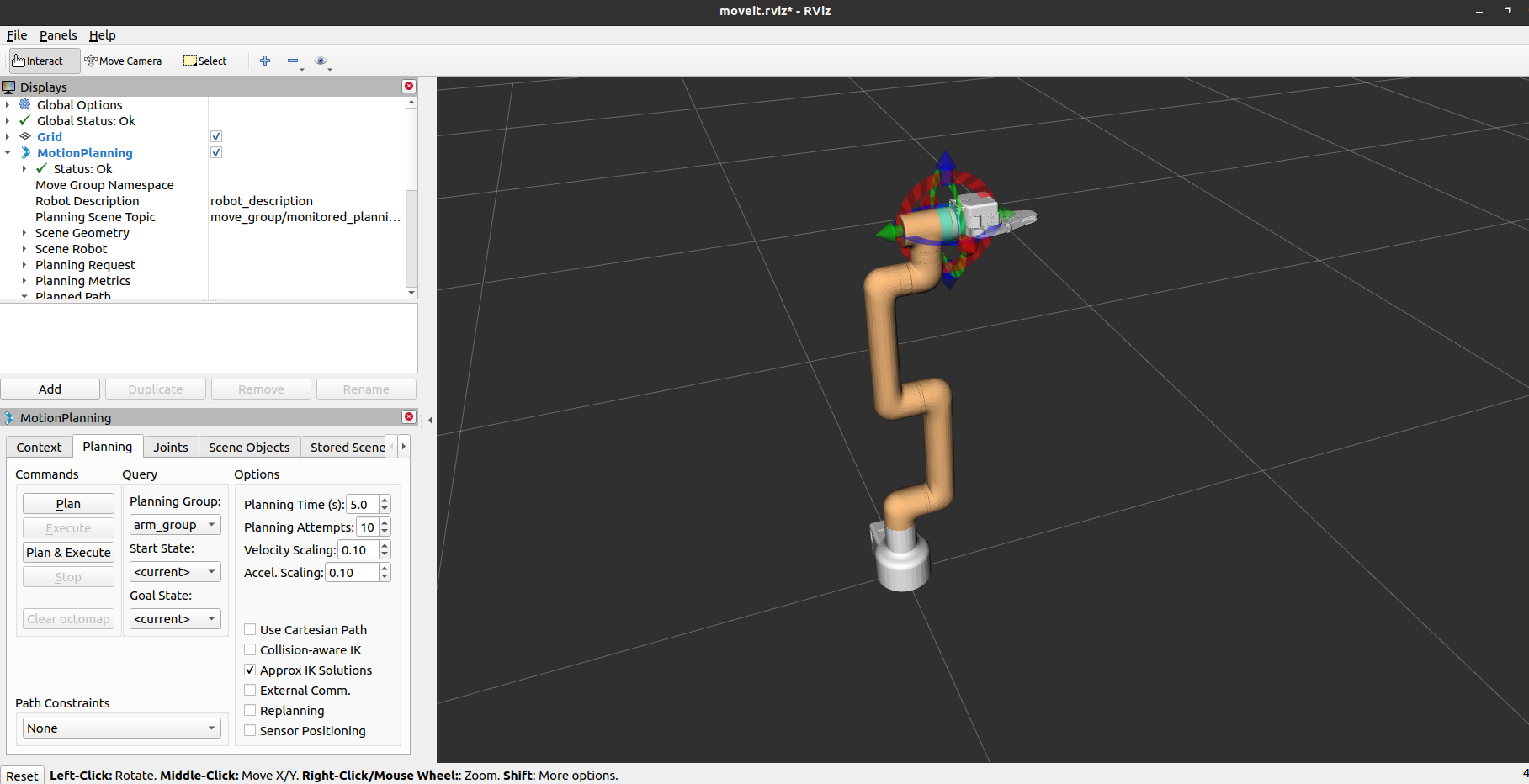
roslaunch mycobot_630_moveit mycobot630_moveit.launch
The running effect is as follows:

Can be planned and executed to demonstrate the effect:
If you need the real robot arm to execute the plan synchronously, you need to open another console terminal and run the command:
# The default Socket IP address of MyCobot Pro 630 is 192.168.1.159 and the port number is 5001. If it is inconsistent, it can be modified according to the actual IP address.
rosrun mycobot_630_moveit sync_plan.py _ip:=192.168.1.159 _port:=5001
Then plan and execute again to demonstrate the effect:
4 Three Finger Gripper Moveit Follow
mycobot_630 now has the myGripper H100 three finger gripper MoveIt follow part integrated.
Open a console terminal (shortcut key Ctrl+Alt+T) and run the command:
roslaunch mycobot_630_moveit_three_grip mycobot630_moveit_three_grip.launch
If you need the real robot arm to execute the plan synchronously, you need to open another console terminal and run the command:
# The default Socket IP address of MyCobot Pro 630 is 192.168.1.159 and the port number is 5001. If it is inconsistent, it can be modified according to the actual IP address.
rosrun mycobot_630_moveit_three_grip sync_plan.py _ip:=192.168.1.159 _port:=5001
Then perform the planned motion operation of Moveit, and the demonstration effect is as follows:
5 Pro Force-Controlled Gripper: MoveIt Usage
The mycobot_630 now features integrated MoveIt support for the force-controlled gripper.
Open a terminal console (shortcut: Ctrl+Alt+T) and run the following command:
roslaunch pro630_moveit_force_gripper demo.launch
The result of running this command is shown below:
Note: The planning groups are divided into the manipulator group and the gripper group—specifically, arm_group and gripper_group. After selecting the corresponding planning group (default: arm_group), you can plan and execute the motion. See the demonstration below:
If you wish to synchronize the execution of the planned motion between the actual robotic arm and the Pro force-controlled gripper, you will need to open an additional terminal window and run the following command:
# The default Socket IP address for the MyCobot Pro 630 is 192.168.1.191, and the port number is 5001. If your configuration differs, please modify these values to match your actual IP address.
rosrun pro630_moveit_force_gripper force_gripper_sync_plan.py _ip:=192.168.1.191 _port:=5001
Then, plan and execute the motion once more. See the demonstration below: