Catalogue
Introduction
1 Product Introduction
1.1 Design Philosophy
1.2 Applicable Users
1.3 Application Scenario
1.4 Peripheral Accessories
1 Adaptive Gripper
2 Electric Gripper
3 Pneumatic gripper
4 Flexible Gripper
5 Suction Cup Module
6 Camera Module
7 Pen Holder
8 Phone Holder
9 myGripper F100 Force Control Gripper
10 Smart Hand with Five Fingers
11 Single-Suction Pump
12 Smart Three Fingers
2 Product Features
2.1 Machine Specification Parameters
2.2 Control Core Parameter
2.3 Mechanical Structure Parameters
2.4 Electrical Characteristic Parameters
2.5 Cartesian Coordinate System
3 User Notes
3.1 Safety Instructions
3.2 Transport and Storage
3.3 Maintenance and Care
3.4 Solving Common Problems
1 Software
2 Hardware
3 Accessories
4 Other
4 First Install and Use
4.1 Product Standard List
4.2 Product Unboxing Guide
4.3 Power-on Test Guide
5 Basic Function Usage
5.1 System Usage Instructions
5.2 Application Usage Instructions
5.3 IO Usage Instructions
5.4 Instructions for Using the Gripper
5.5 Modbus Usage Instructions
6 SDK Development Guide
6.1 Based on python development and use
Python Use Cases
6.2 Robot Operating System 1 (ROS1)
1 Environment Building
2 ROS basic knowledge
3 Rviz use
4 Basic function cases
6.3 Robot Operating System 2 (ROS2)
1 Environment Building
2 ROS2 basic knowledge
3 Rviz2 uses
4 Basic function cases
6.4 socket API
7 Robot arm usage scenario cases
7.1 Writing and drawing
7.2 Holographic projection
7.3 PLC IO interactive control cases
7.4 Composite Robot Case
8 Related information download
9 Image burning and system usage
9.1 What is mirroring
9.2 How to burn
9.3 When to burn
10 About us
10.1 Elephant Robot
10.2 Contact Us
Published with GitBook
In this Chapter:
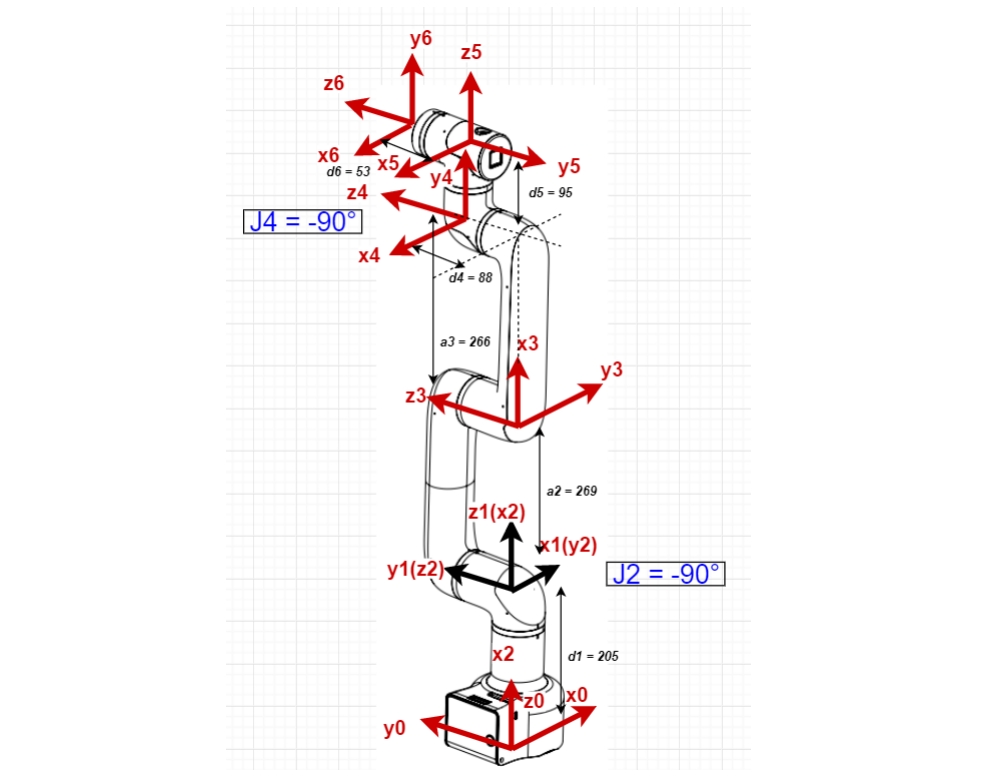
2.5 Cartesian Coordinate System
Coordinate system parameters
DH coordinate system:
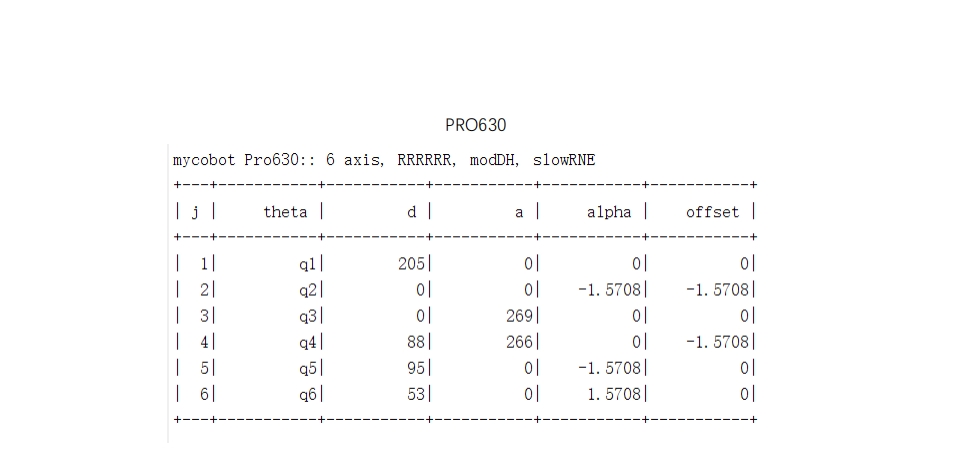
MDH parameter table:
← Previous page
|
Next section →
results matching "
"
No results matching "
"