Mechanical structure parameters
1 Structural parameters
1.1 Specifications and dimensions
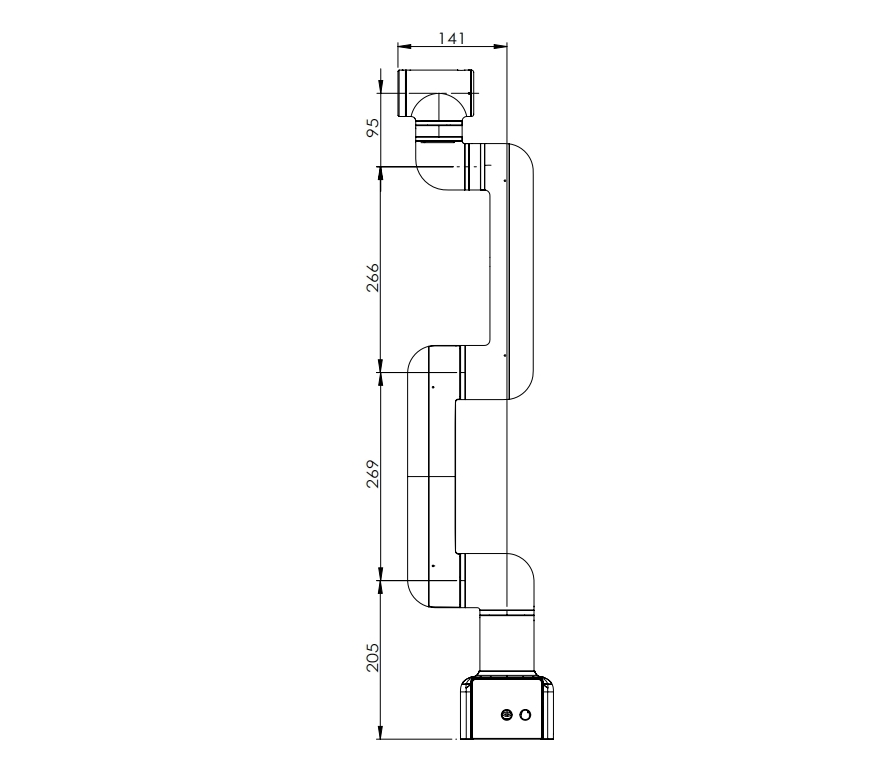
1.2 Joint range of motion
Hard limit
| Joint | Scope |
|---|---|
| J1 | ±360° |
| J2 | ±157 ° |
| J3 | ±165° |
| J4 | ±180° |
| J5 | ±180° |
| J6 | ±360° |
Soft limit
| Joint | Scope |
|---|---|
| J1 | -180°~+180° |
| J2 | -270°~+90° |
| J3 | -150°~+150° |
| J4 | -260°~+80° |
| J5 | -168°~+168° |
| J6 | -174°~+174° |
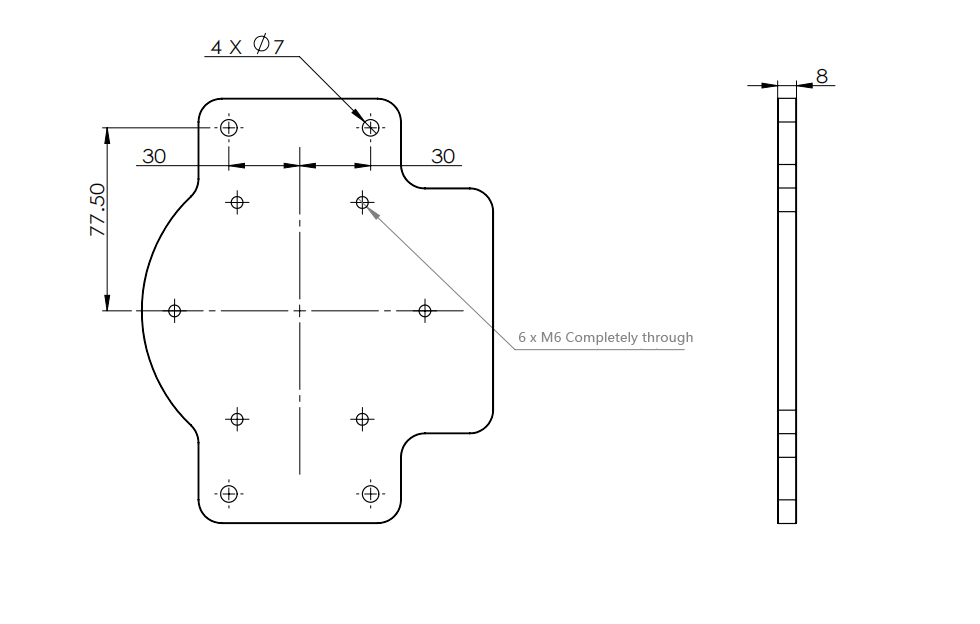
2 Dimensional drawing of base plate
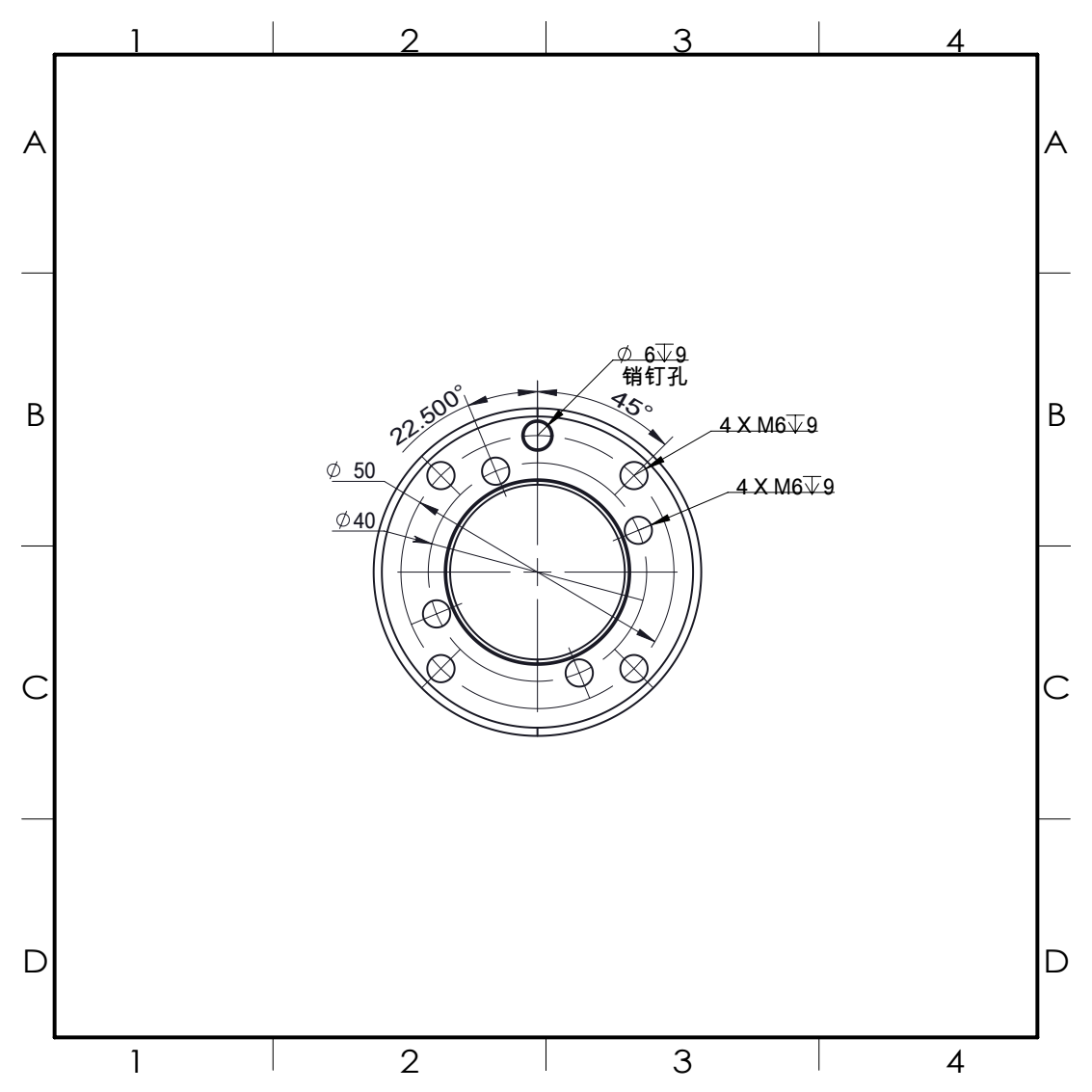
3 Robot end mounting flange
Screw thread hole at the end of the robot arm