Nav2
接下来将介绍和使用Nav2导航。
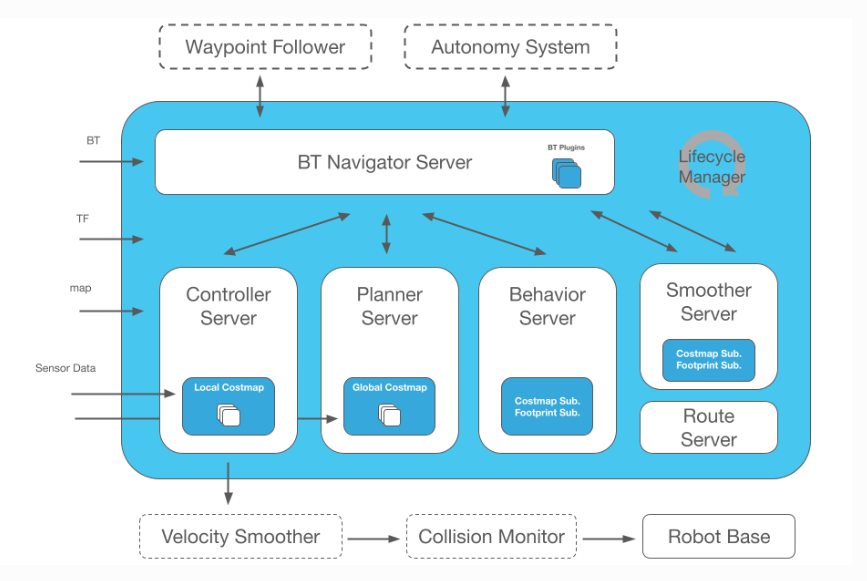
Nav2 是 ROS Navigation Stack 的继任者,部署了为移动和表面机器人技术提供动力的相同类型的技术。该项目允许移动机器人在复杂的环境中导航,以使用几乎任何类别的机器人运动学完成用户定义的应用任务。它不仅可以从 A 点移动到 B 点,还可以具有中间姿势,并表示其他类型的任务,例如对象跟踪、完整覆盖导航等。
启动AGVPro底层通信+激光雷达
按下键盘Ctrl+Alt+T,打开第一个终端,输入指令
ros2 launch agv_pro_bringup agv_pro_bringup.launch.py
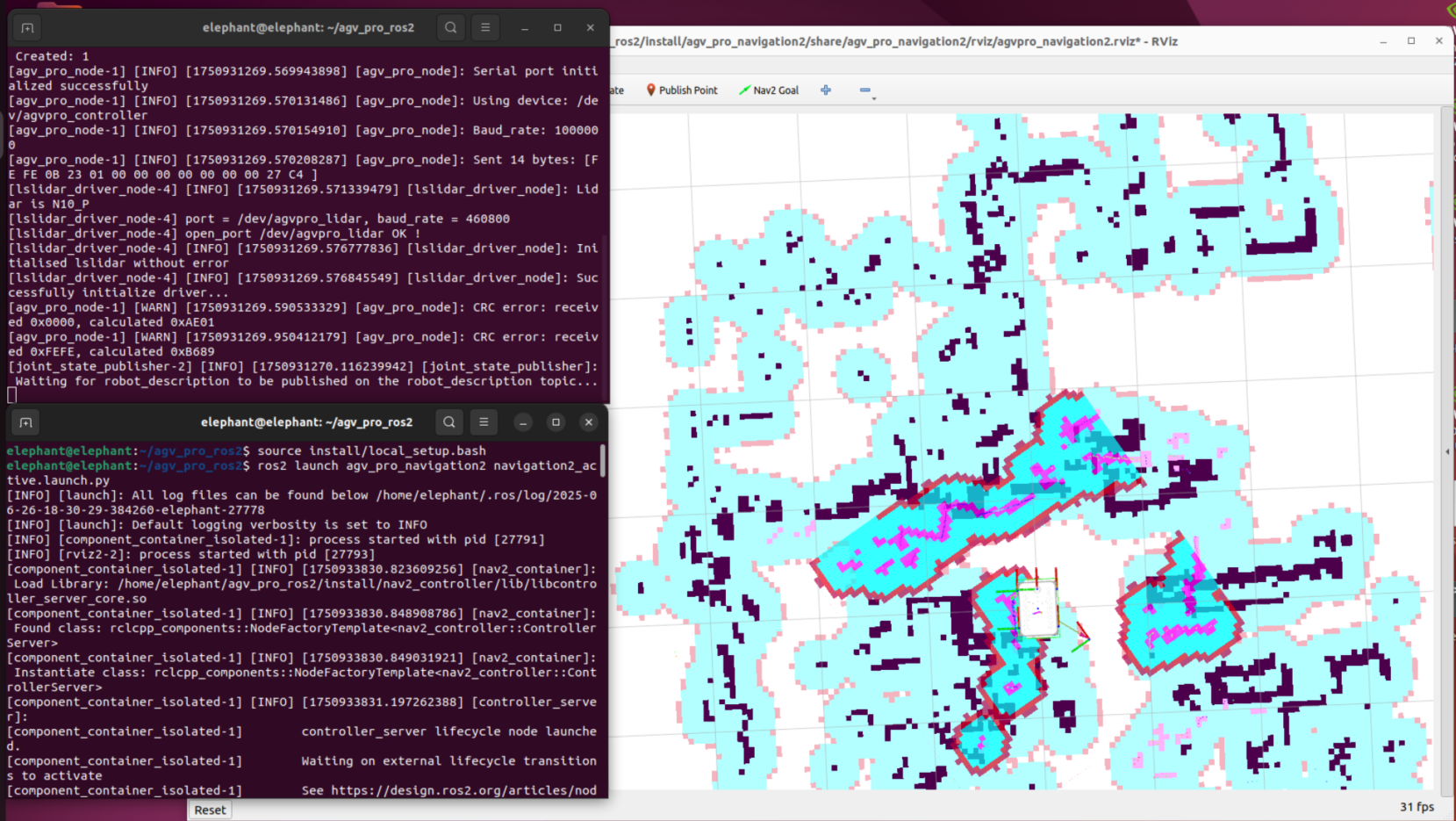
启动Nav2
按下键盘Ctrl+Alt+T,打开第二个终端,输入指令
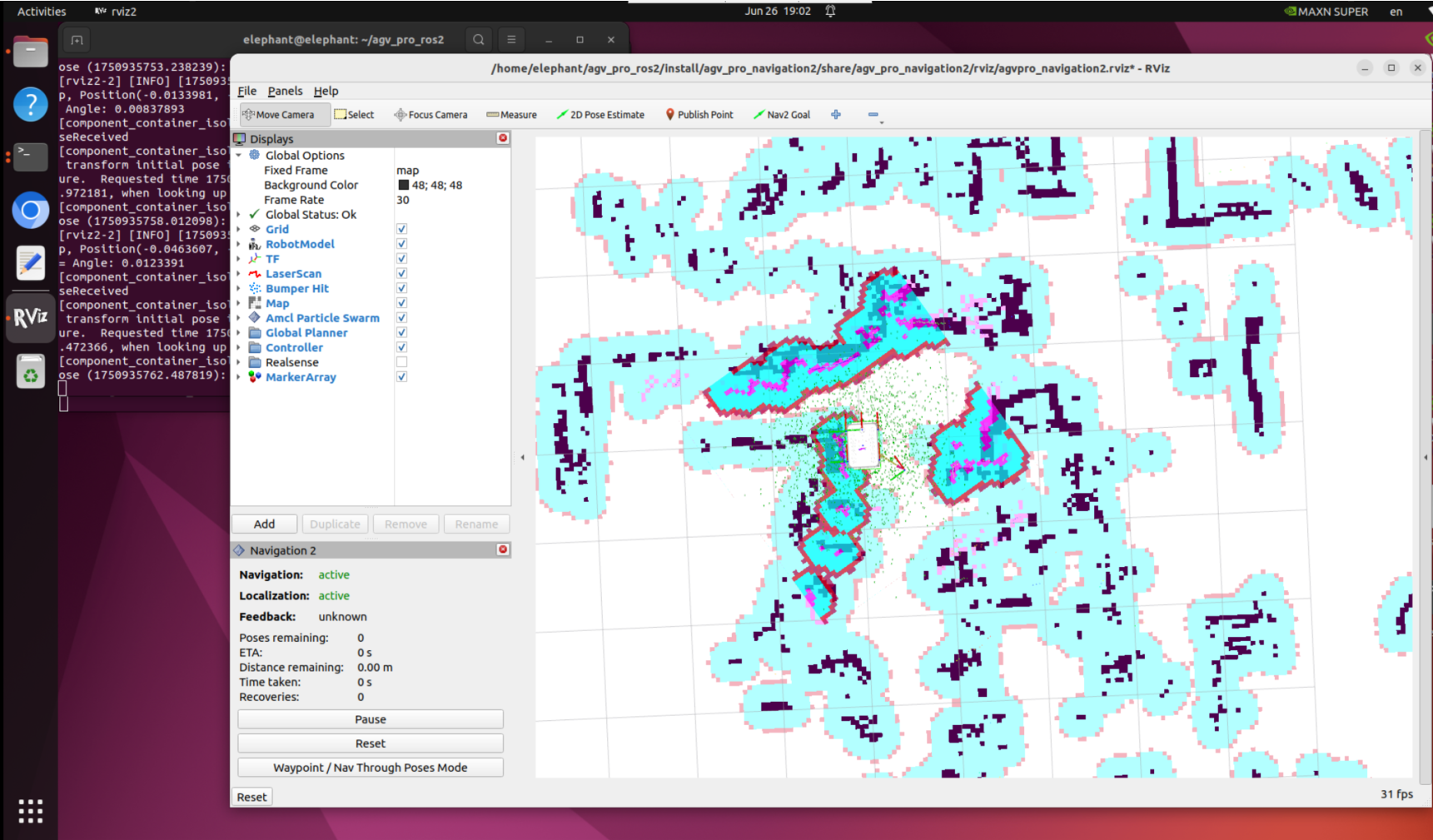
ros2 launch agv_pro_navigation2 navigation2_active.launch.py
这将启动一个rviz
首先,在地图上找到机器人的位置。检查您的机器人在地图中的位置。
在 RViz 中设置机器人的姿势。单击 2D Pose Estimate 按钮,并在地图上指出机器人的位置。绿色箭头的方向是 AGVPro的朝前方向。
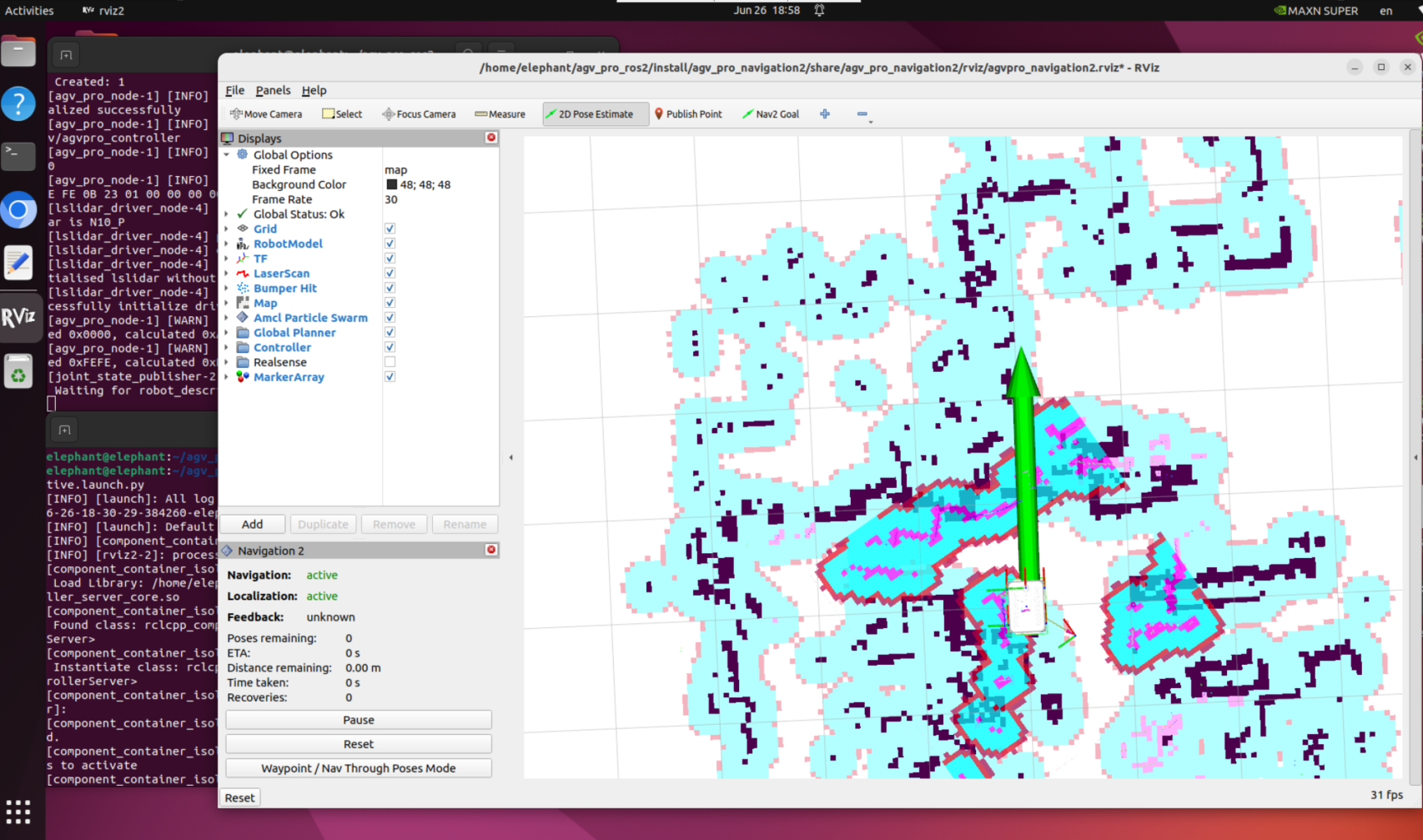
然后3D 模型会移动到该位置。观察激光雷达跟地图障碍物是否匹配,估计位置中的小误差是可以容忍的。
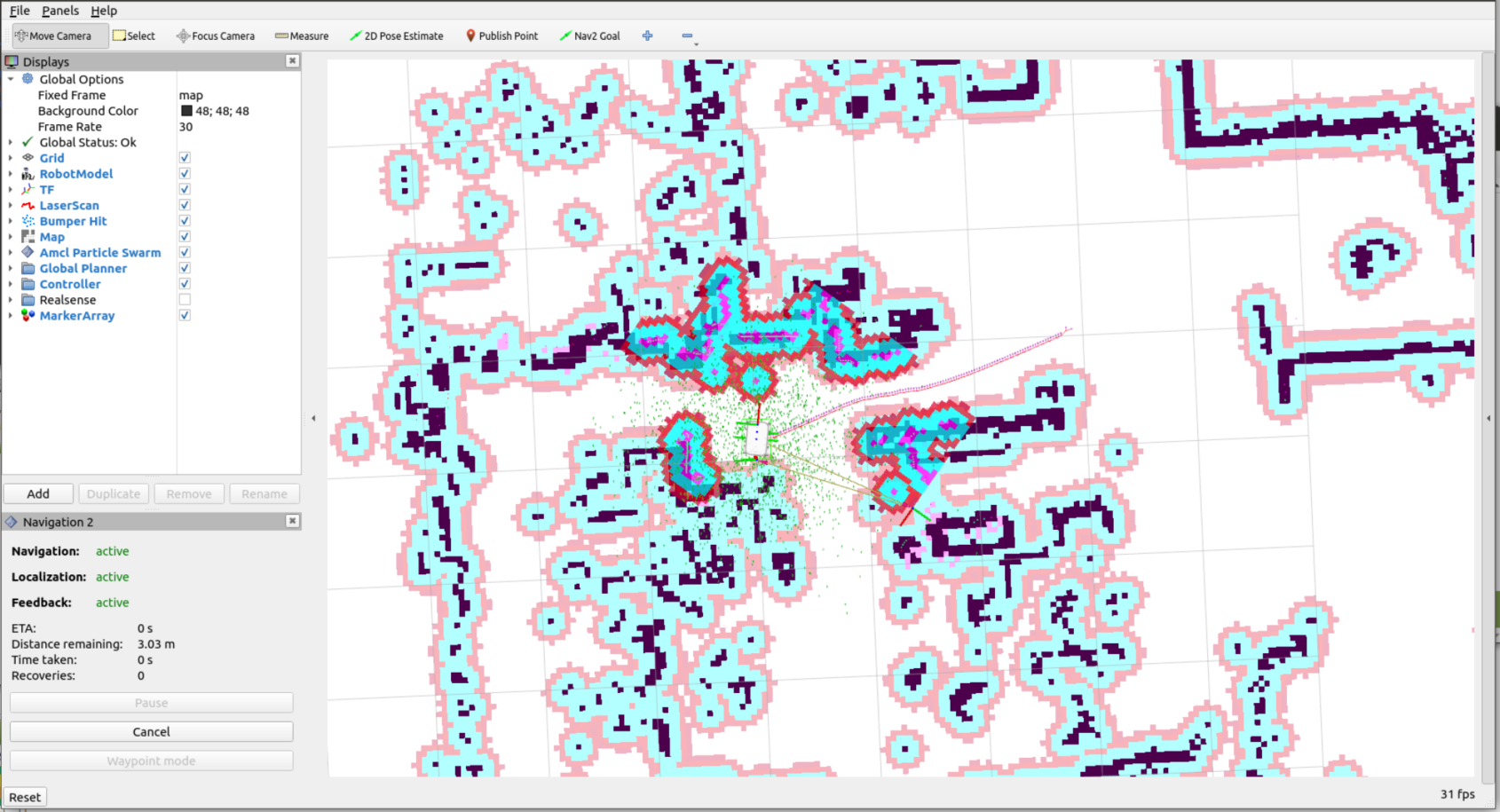
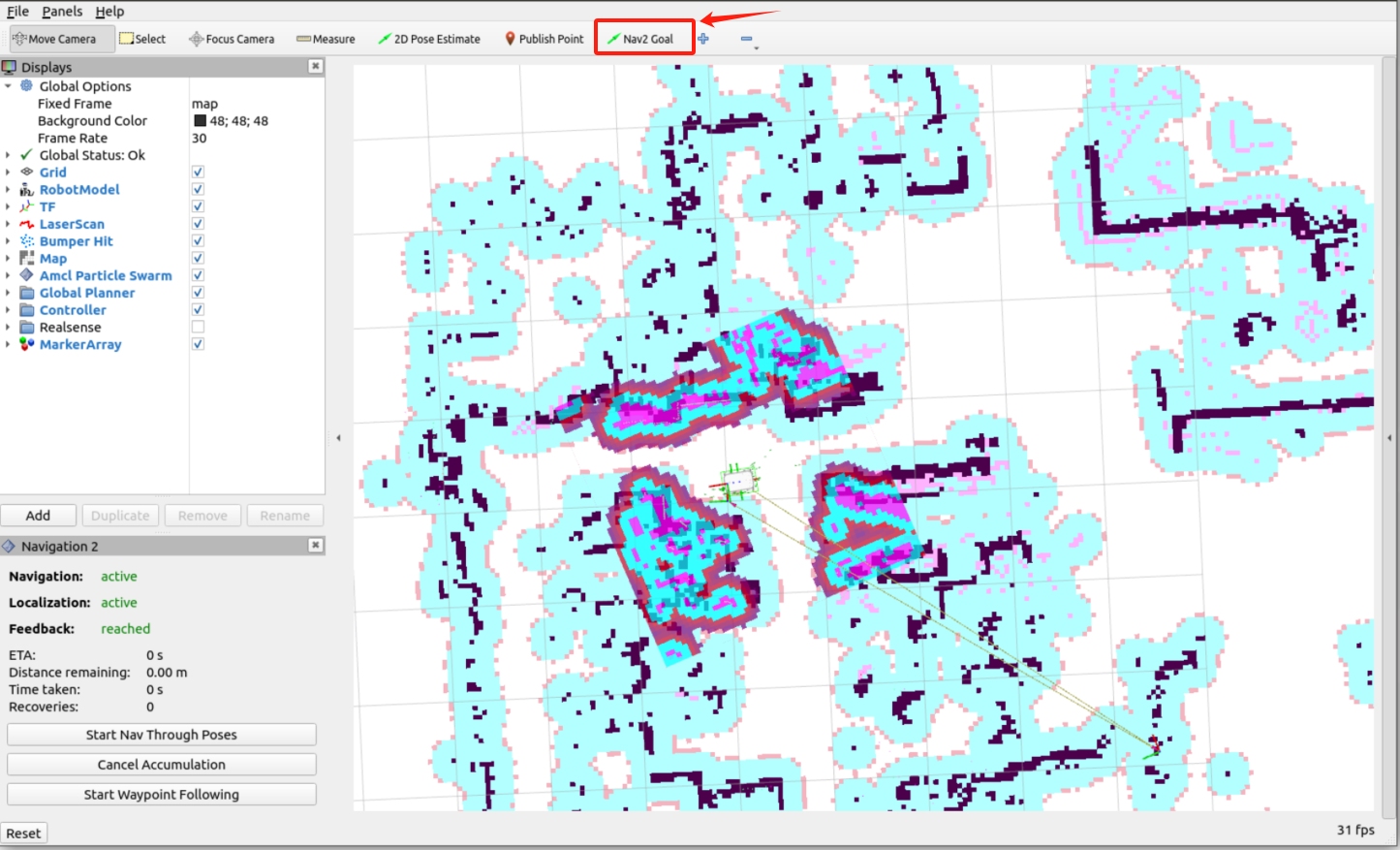
在地图上选择一个要导航的目标位置。使用Nav2 Goal按钮发送目标位置和目标方向。
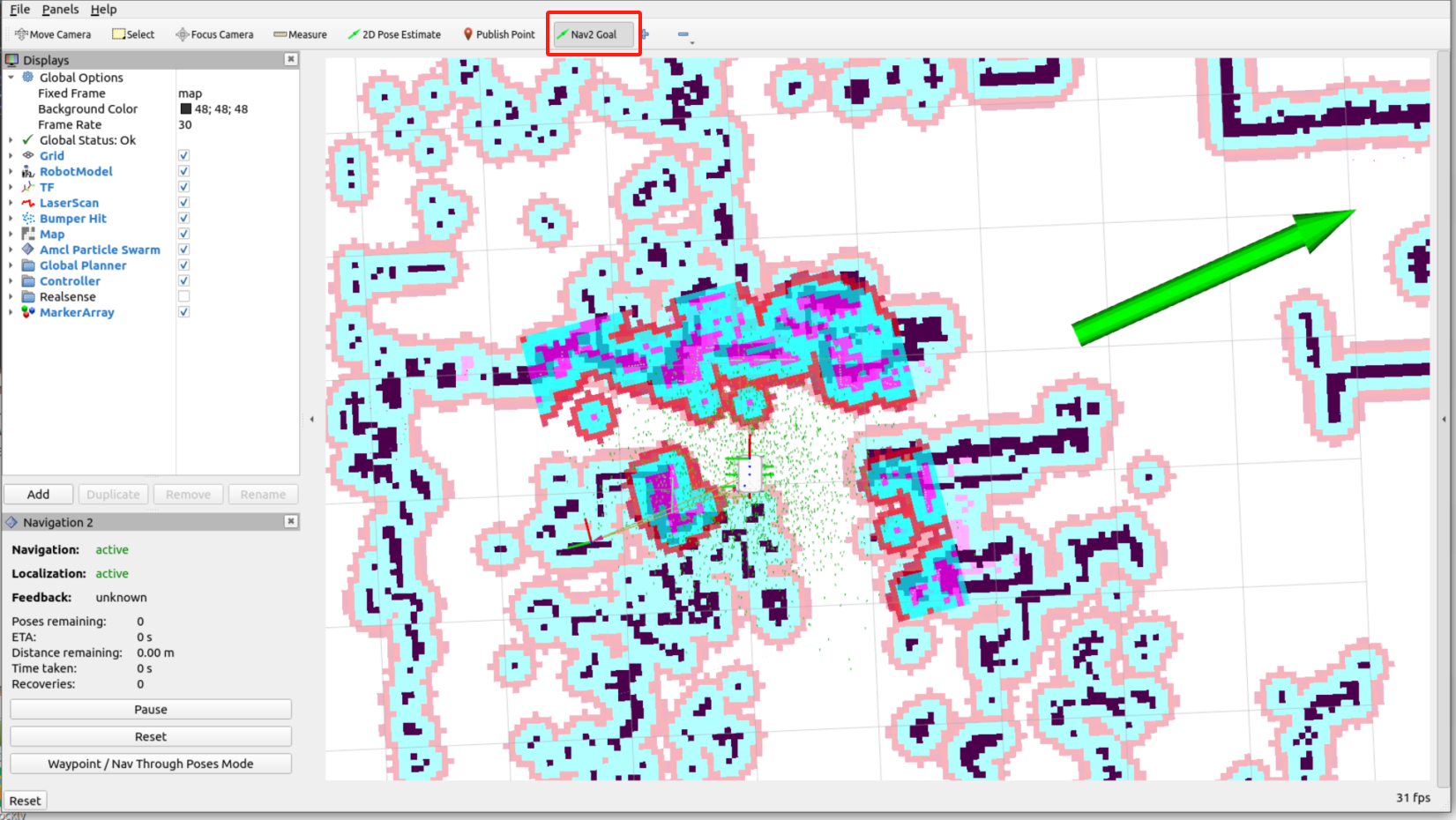
Nav2就会规划路径并发送运动指令,完成导航。
路径点跟随
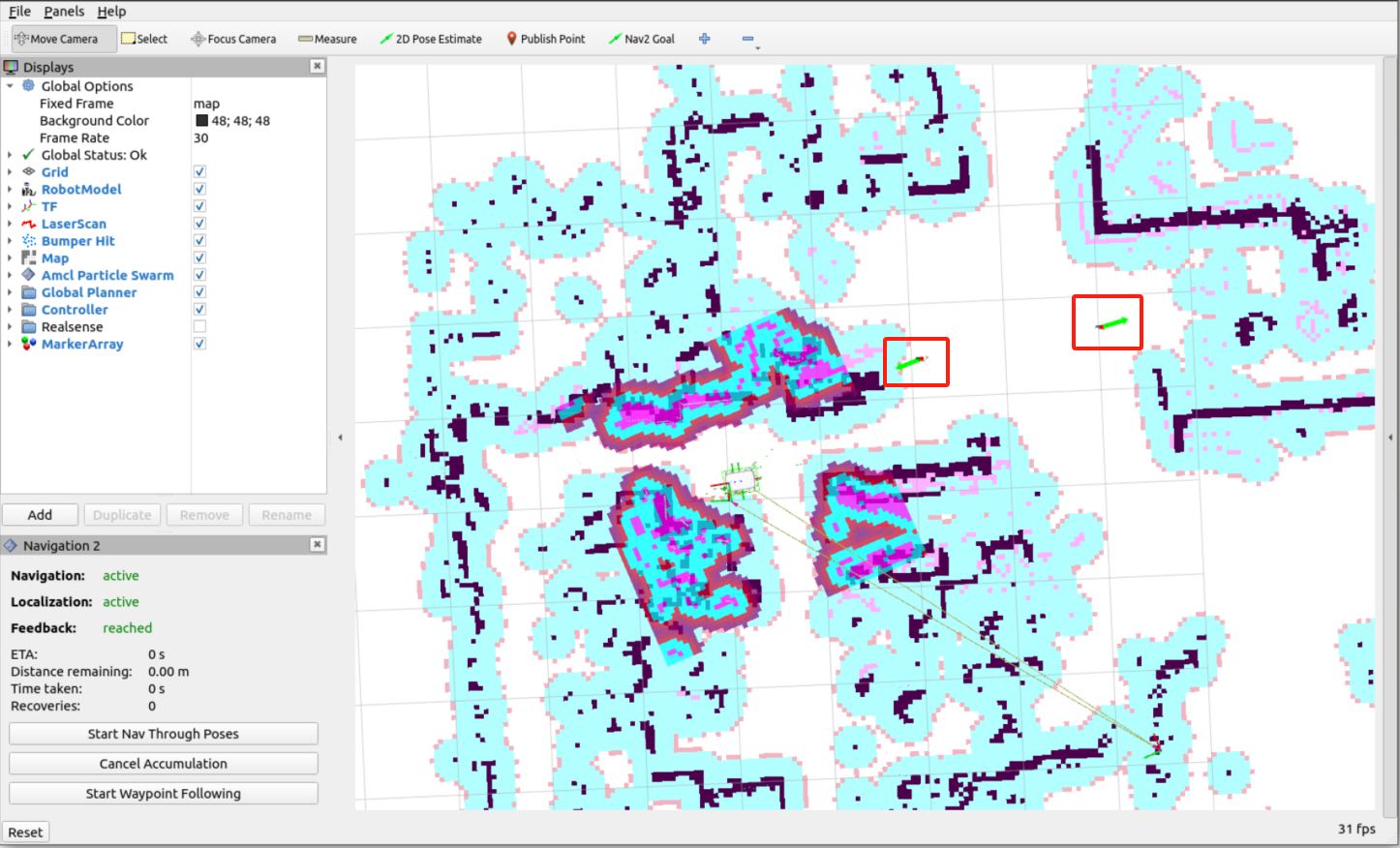
点击rviz2左下框的Waypoint/Nav Through Poses Mode,切换成路径点跟随模式
点击Nav2 Goal 发布两个导航点
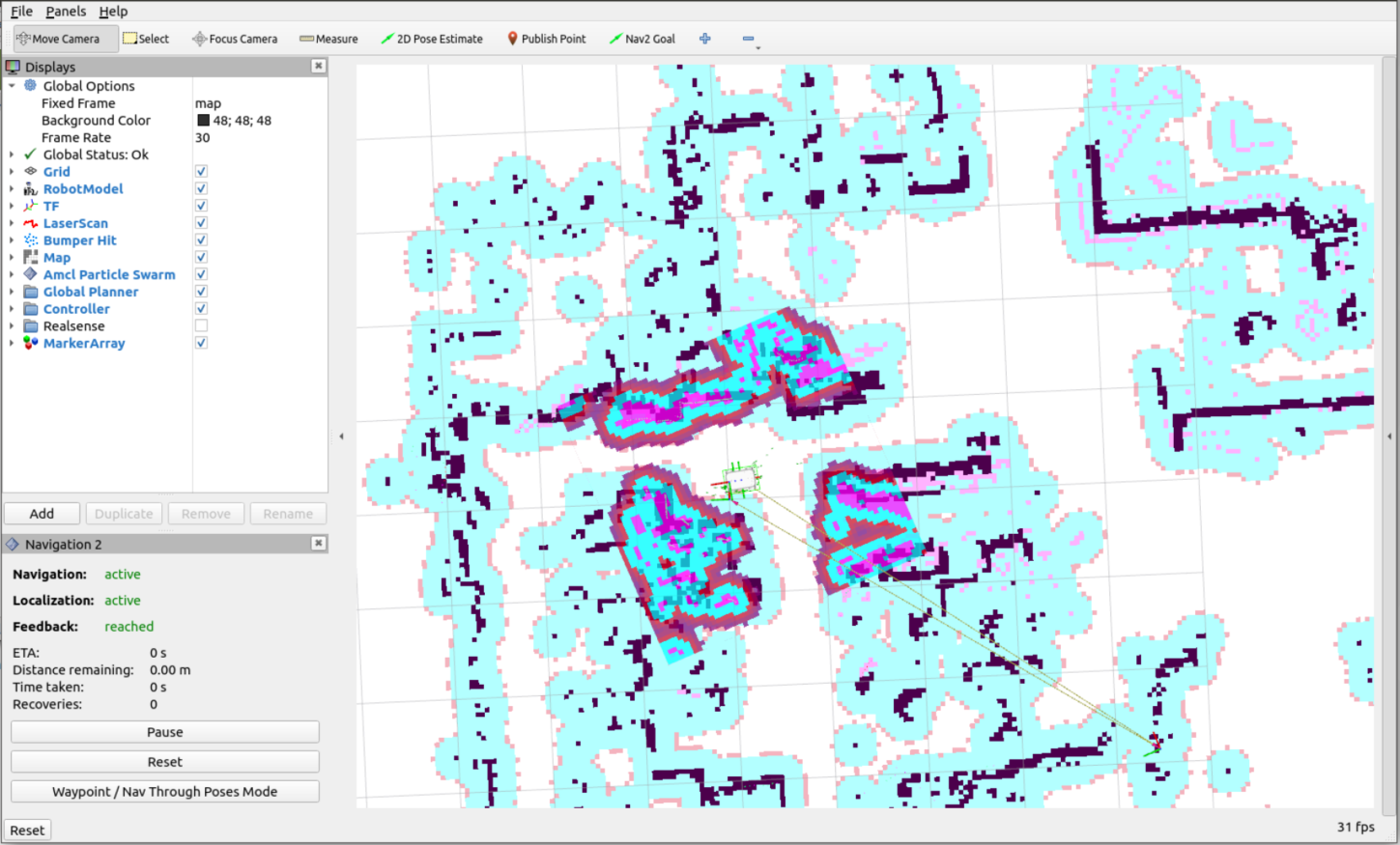
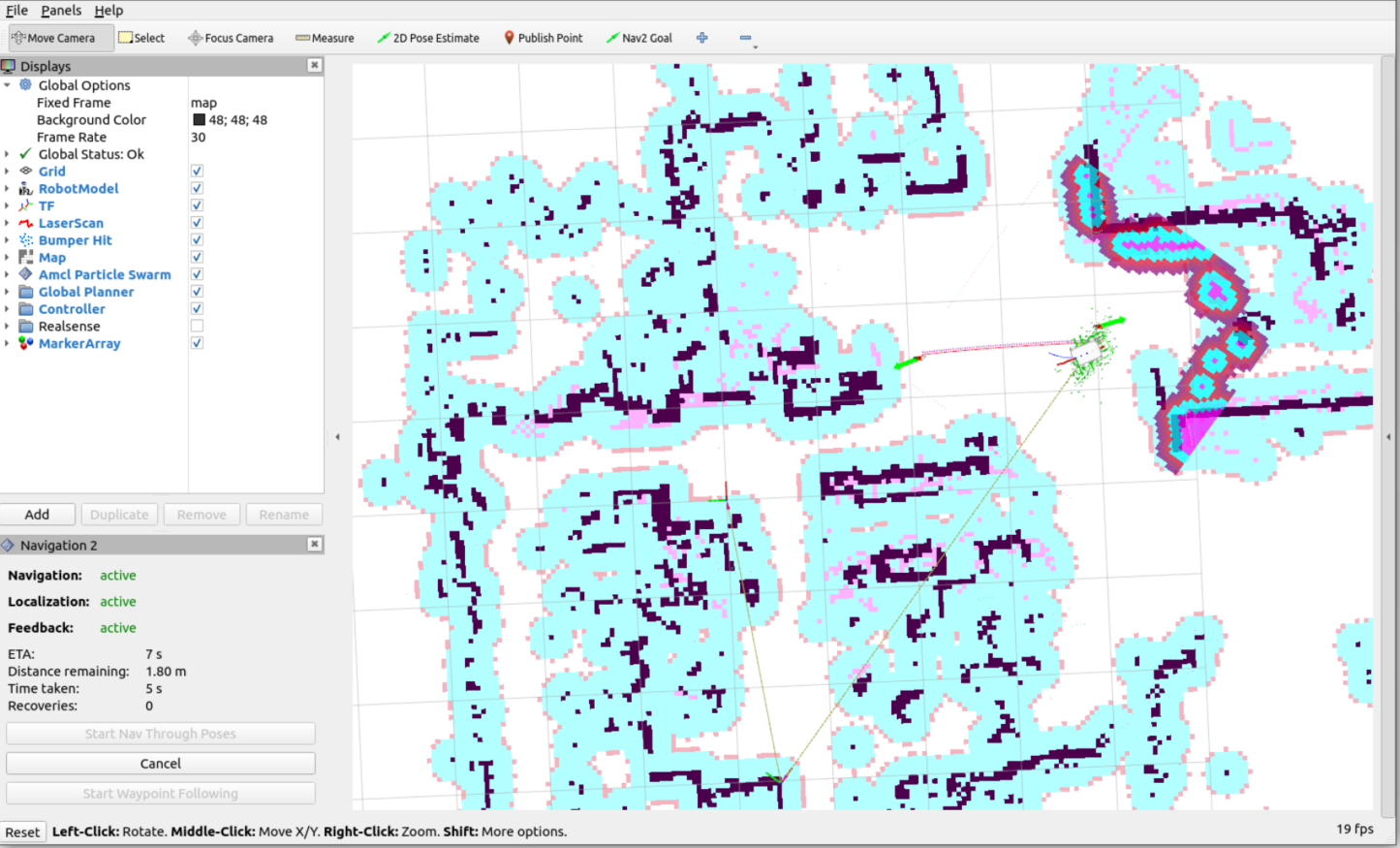
点击左下角的Start Waypoint Following,然后就会依次按顺序进行导航。
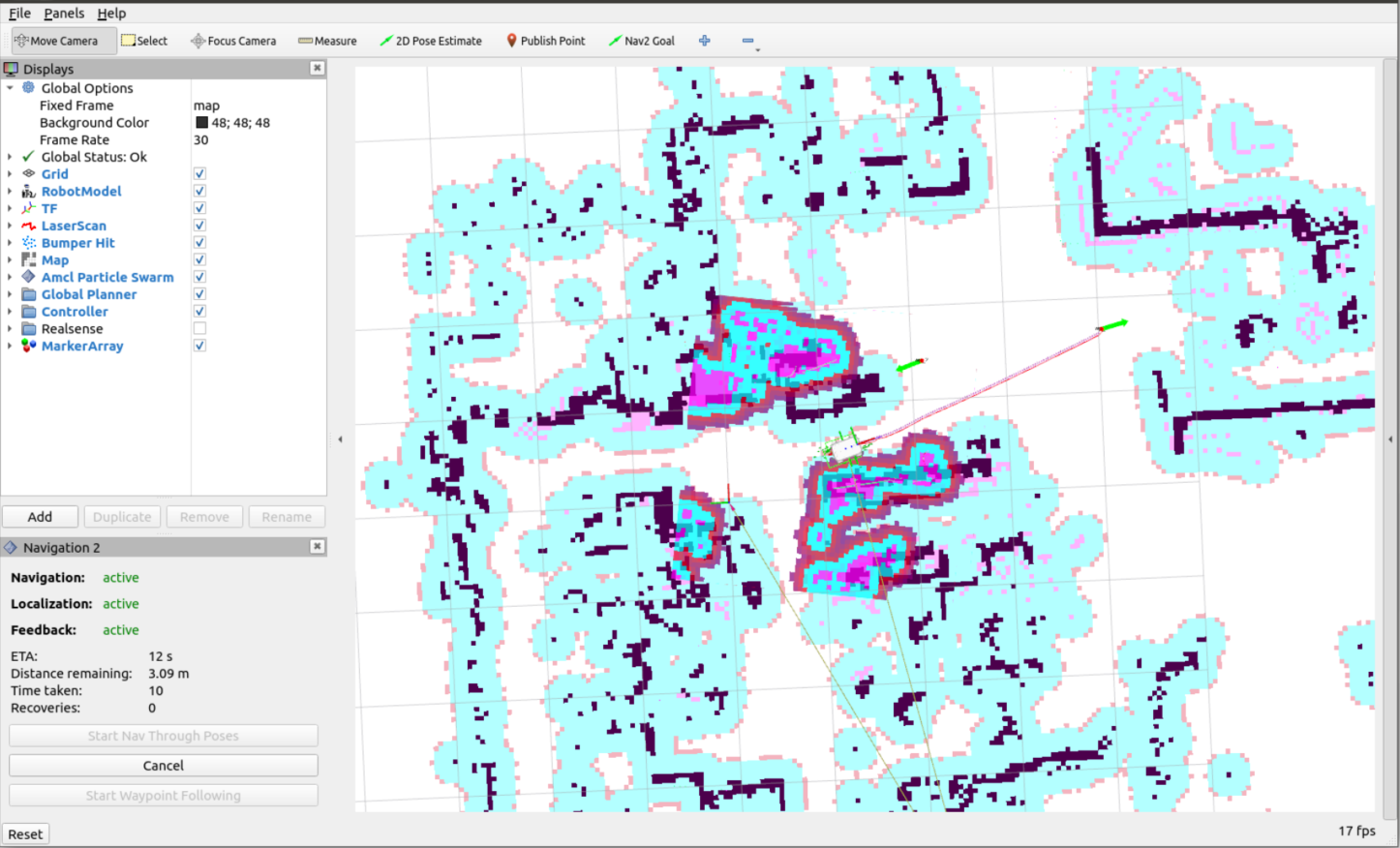
导航到第一个点位后,继续导航到第二点位
更改起始导航地图
在6.2.2章节中,使用slam算法创建空间地图,并获得了一组地图文件,即位于 ~/myagv_ros2/src/myagv_navigation2/map 目录下的 map.pgm 和 map.yaml,我们就是基于这两个地图文件的基础上进行导航的。下面将介绍nav2如何加载其他地图。
方法一:修改launch.py文件
找到agv_pro_ros2/agv_pro_navigation2/launch/navigation2_active.launch.py文件,将第二十行的'map.yaml'改成你需要的加载的地图文件,然后通过colcon build编译。
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.substitutions import LaunchConfiguration
from launch.actions import DeclareLaunchArgument,IncludeLaunchDescription
from launch.conditions import IfCondition
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch_ros.actions import Node
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='false')
use_rviz = LaunchConfiguration('use_rviz', default='true')
map_dir = LaunchConfiguration(
'map',
default=os.path.join(
get_package_share_directory('agv_pro_navigation2'),
'map',
'map.yaml'))
param_file_name = 'agvpro.yaml'
param_dir = LaunchConfiguration(
'params_file',
default=os.path.join(
get_package_share_directory('agv_pro_navigation2'),
'param',
param_file_name))
nav2_launch_file_dir = os.path.join(get_package_share_directory('nav2_bringup'), 'launch')
rviz_config_dir = os.path.join(
get_package_share_directory('agv_pro_navigation2'),
'rviz',
'agvpro_navigation2.rviz')
return LaunchDescription([
DeclareLaunchArgument(
'map',
default_value=map_dir,
description='Full path to map file to load'),
DeclareLaunchArgument(
'params_file',
default_value=param_dir,
description='Full path to param file to load'),
IncludeLaunchDescription(
PythonLaunchDescriptionSource([nav2_launch_file_dir, '/bringup_launch.py']),
launch_arguments={
'map': map_dir,
'params_file': param_dir}.items(),
),
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
condition=IfCondition(use_rviz),
output='screen'),
])
方法二:启动launch时增加map的参数
在启动ros2 launch agv_pro_navigation2 navigation2_active.launch.py时,增加map:=参数。关于launch这部分写法,可以参考该链接。
ros2 launch agv_pro_navigation2 navigation2_active.launch.py map:=~/agv_pro_ros2/src/agv_pro_navigation2/map/map_demo.yaml
nav2性能调优指导
nav2导航框架提供大量的可调参数,不同场景下导航参数的优化侧重点不同,用户可以根据nav2提供的指导,调整参数以获得最佳导航性能。
下面是AGV Pro的默认的nav2参数
amcl:
ros__parameters:
use_sim_time: False
alpha1: 0.4
alpha2: 0.3
alpha3: 0.1
alpha4: 0.1
alpha5: 0.1
base_frame_id: "base_footprint"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 100.0
laser_min_range: -1.0
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 2000
min_particles: 500
odom_frame_id: "odom"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 2
robot_model_type: "nav2_amcl::OmniMotionModel"
save_pose_rate: 0.5
sigma_hit: 0.02
tf_broadcast: true
transform_tolerance: 0.3
update_min_a: 0.06
update_min_d: 0.025
z_hit: 0.7
z_max: 0.001
z_rand: 0.059
z_short: 0.24
# Initial Pose
set_initial_pose: True
initial_pose.x: 0.0
initial_pose.y: 0.0
initial_pose.z: 0.0
initial_pose.yaw: 0.0
amcl_map_client:
ros__parameters:
use_sim_time: False
amcl_rclcpp_node:
ros__parameters:
use_sim_time: False
bt_navigator:
ros__parameters:
use_sim_time: False
global_frame: map
robot_base_frame: base_footprint
odom_topic: /odom
bt_loop_duration: 10
default_server_timeout: 20
enable_groot_monitoring: True
groot_zmq_publisher_port: 1666
groot_zmq_server_port: 1667
# 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults:
# nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml
# nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml
# They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2.
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_compute_path_through_poses_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_back_up_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_distance_traveled_condition_bt_node
- nav2_single_trigger_bt_node
- nav2_goal_updated_controller_bt_node
- nav2_is_battery_low_condition_bt_node
- nav2_navigate_through_poses_action_bt_node
- nav2_navigate_to_pose_action_bt_node
- nav2_remove_passed_goals_action_bt_node
- nav2_planner_selector_bt_node
- nav2_controller_selector_bt_node
- nav2_goal_checker_selector_bt_node
bt_navigator_rclcpp_node:
ros__parameters:
use_sim_time: False
controller_server:
ros__parameters:
use_sim_time: False
controller_frequency: 5.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
failure_tolerance: 3.0
progress_checker_plugin: "progress_checker"
goal_checker_plugins: ["general_goal_checker"] # "precise_goal_checker"
controller_plugins: ["FollowPath"]
# Progress checker parameters
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.5
movement_time_allowance: 10.0
# Goal checker parameters
#precise_goal_checker:
# plugin: "nav2_controller::SimpleGoalChecker"
# xy_goal_tolerance: 0.25
# yaw_goal_tolerance: 0.25
# stateful: True
general_goal_checker:
stateful: True
plugin: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0.25
yaw_goal_tolerance: 0.25
# DWB parameters
FollowPath:
plugin: "dwb_core::DWBLocalPlanner"
debug_trajectory_details: True
min_vel_x: 0.0
min_vel_y: 0.0
max_vel_x: 0.26
max_vel_y: 0.0
max_vel_theta: 0.5
min_speed_xy: 0.0
max_speed_xy: 0.26
min_speed_theta: 0.0
# Add high threshold velocity for turtlebot 3 issue.
# https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75
acc_lim_x: 2.5
acc_lim_y: 0.0
acc_lim_theta: 0.25
decel_lim_x: -2.5
decel_lim_y: 0.0
decel_lim_theta: -0.25
vx_samples: 20
vy_samples: 5
vtheta_samples: 20
sim_time: 1.7
linear_granularity: 0.05
angular_granularity: 0.025
transform_tolerance: 0.1
xy_goal_tolerance: 0.25
trans_stopped_velocity: 0.1
short_circuit_trajectory_evaluation: True
stateful: True
critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"]
BaseObstacle.scale: 0.02
PathAlign.scale: 32.0
PathAlign.forward_point_distance: 0.1
GoalAlign.scale: 24.0
GoalAlign.forward_point_distance: 0.1
PathDist.scale: 32.0
GoalDist.scale: 24.0
RotateToGoal.scale: 32.0
RotateToGoal.slowing_factor: 5.0
RotateToGoal.lookahead_time: -1.0
controller_server_rclcpp_node:
ros__parameters:
use_sim_time: False
local_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0
publish_frequency: 2.0
global_frame: odom
robot_base_frame: base_footprint
use_sim_time: False
rolling_window: true
width: 3
height: 3
resolution: 0.05
footprint: "[[0.26, 0.18], [0.26, -0.18], [-0.26, -0.18], [-0.26, 0.18]]"
plugins: ["voxel_layer", "inflation_layer"]
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 5.0
inflation_radius: 0.25
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
map_subscribe_transient_local: True
always_send_full_costmap: True
local_costmap_client:
ros__parameters:
use_sim_time: False
local_costmap_rclcpp_node:
ros__parameters:
use_sim_time: False
global_costmap:
global_costmap:
ros__parameters:
update_frequency: 0.3
publish_frequency: 0.3
global_frame: map
robot_base_frame: base_footprint
use_sim_time: False
robot_radius: 0.22
resolution: 0.05
track_unknown_space: true
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 5.0
inflation_radius: 0.25
always_send_full_costmap: True
global_costmap_client:
ros__parameters:
use_sim_time: False
global_costmap_rclcpp_node:
ros__parameters:
use_sim_time: False
map_server:
ros__parameters:
use_sim_time: False
yaml_filename: "turtlebot3_world.yaml"
map_saver:
ros__parameters:
use_sim_time: False
save_map_timeout: 5.0
free_thresh_default: 0.25
occupied_thresh_default: 0.65
map_subscribe_transient_local: True
planner_server:
ros__parameters:
expected_planner_frequency: 1.0
use_sim_time: False
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 2.0
use_astar: false
allow_unknown: true
planner_server_rclcpp_node:
ros__parameters:
use_sim_time: False
recoveries_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0
recovery_plugins: ["spin", "backup", "wait"]
spin:
plugin: "nav2_recoveries/Spin"
backup:
plugin: "nav2_recoveries/BackUp"
wait:
plugin: "nav2_recoveries/Wait"
global_frame: odom
robot_base_frame: base_footprint
transform_timeout: 0.1
use_sim_time: False
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2
robot_state_publisher:
ros__parameters:
use_sim_time: False
waypoint_follower:
ros__parameters:
loop_rate: 20
stop_on_failure: false
waypoint_task_executor_plugin: "wait_at_waypoint"
wait_at_waypoint:
plugin: "nav2_waypoint_follower::WaitAtWaypoint"
enabled: True
waypoint_pause_duration: 200