4.2.3 快速体验
AGVPRO_UI是一款可视化UI软件, 内置在jetson orin nano系统中,用于客户快速体验myAGV Pro基础电机控制、传感器控制等项目。
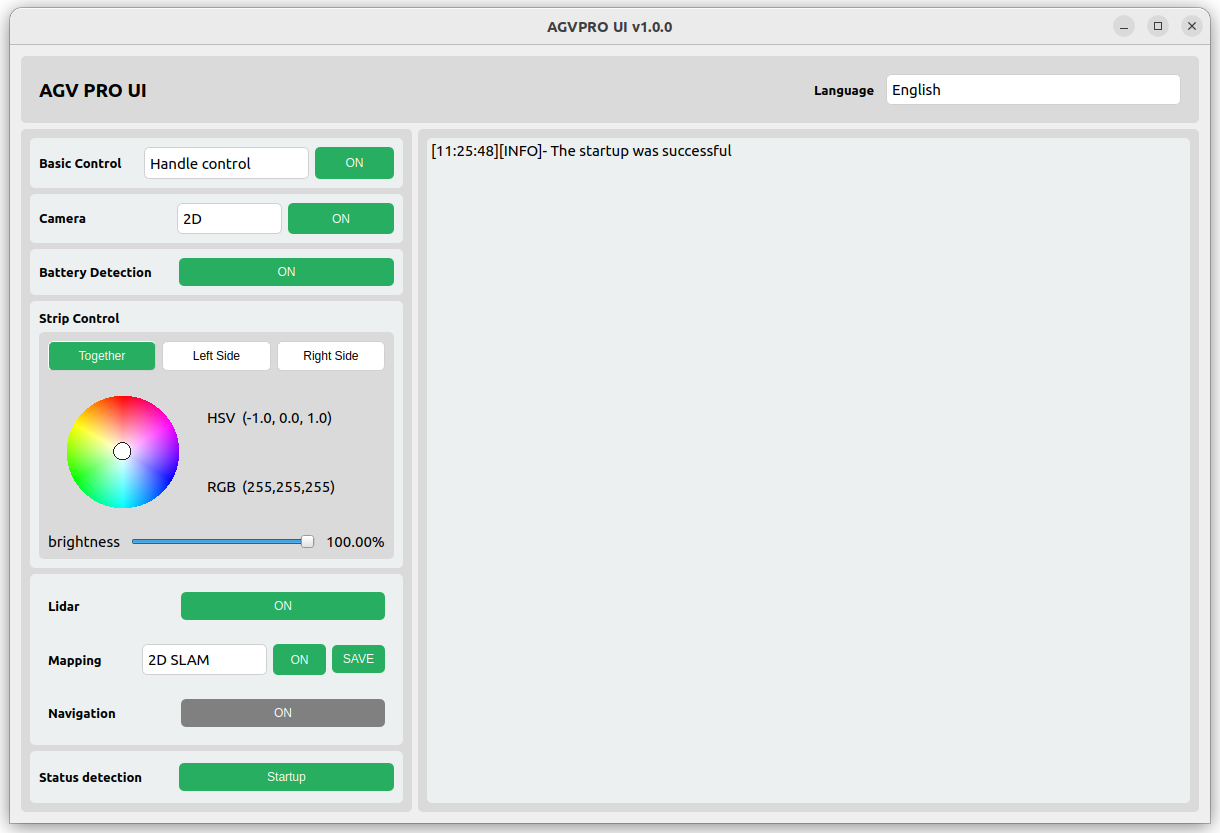
1. 电量检测
开启电池电量检测时, 日志栏每隔1S实时显示电池电压及电压百分比。
2. 基本控制
支持通过键盘、手柄控制小车进行移动。
2.1 键盘控制
当选择键盘控制时, 点击ON按钮, 可以通过键盘控制小车进行移动。其按键功能如下表所示。
| 按键 | 方向 |
|---|---|
| i | 向前移动 |
| , | 向后移动 |
| j | 向左移动 |
| i | 向右移动 |
| u | 逆时针旋转 |
| o | 顺时针旋转 |
| k | 停止 |
| m | 顺时针反向旋转 |
| . | 逆时针反向旋转 |
| q | 提高线速度和角速度 |
| z | 降低线速度和角速度 |
注意: 目前只支持在激光雷达启动时使用, 激光雷达关闭时, 支持支手柄控制。
2.2 手柄控制
当选择手柄控制时, 点击ON按钮, 可以通过手柄控制小车进行移动。其按键功能如下表所示。
| 热键 | 方向 | 热键 | 方向 |
|---|---|---|---|
L1 |
速度增加 | L2 |
速度减小 |
R1 |
小车左旋 | R2 |
小车右旋 |
Startup |
小车复位 | 摇杆2 |
控制小车前、后、左、右移动 |
注意: 复位键用于恢复小车速度, 小车运动控制为按下运动,松开即停止。只能在激光雷达关闭时使用(激光雷达启动时,使用键盘控制), 手柄支持新的亚博手柄,旧的不支持。

3. 2D/3D摄像头
下拉标签选择2D相机或3D相机,点击ON按钮启动对应相机的实时相机画面
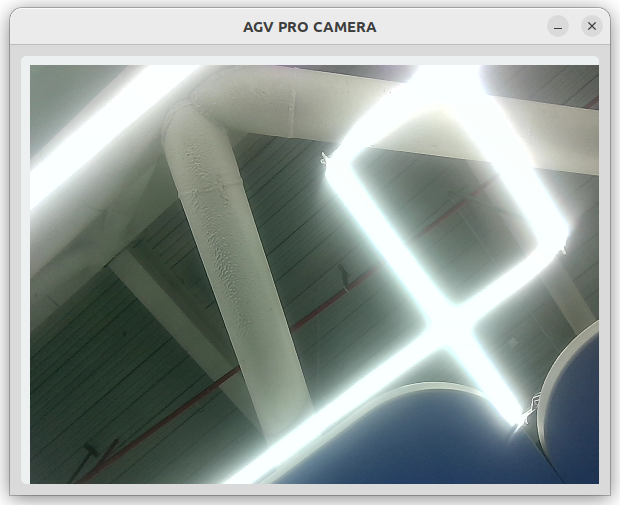
注意: 3D相机需要连接3D相机,2D相机需要连接2D相机。
4. ROS2雷达建图导航
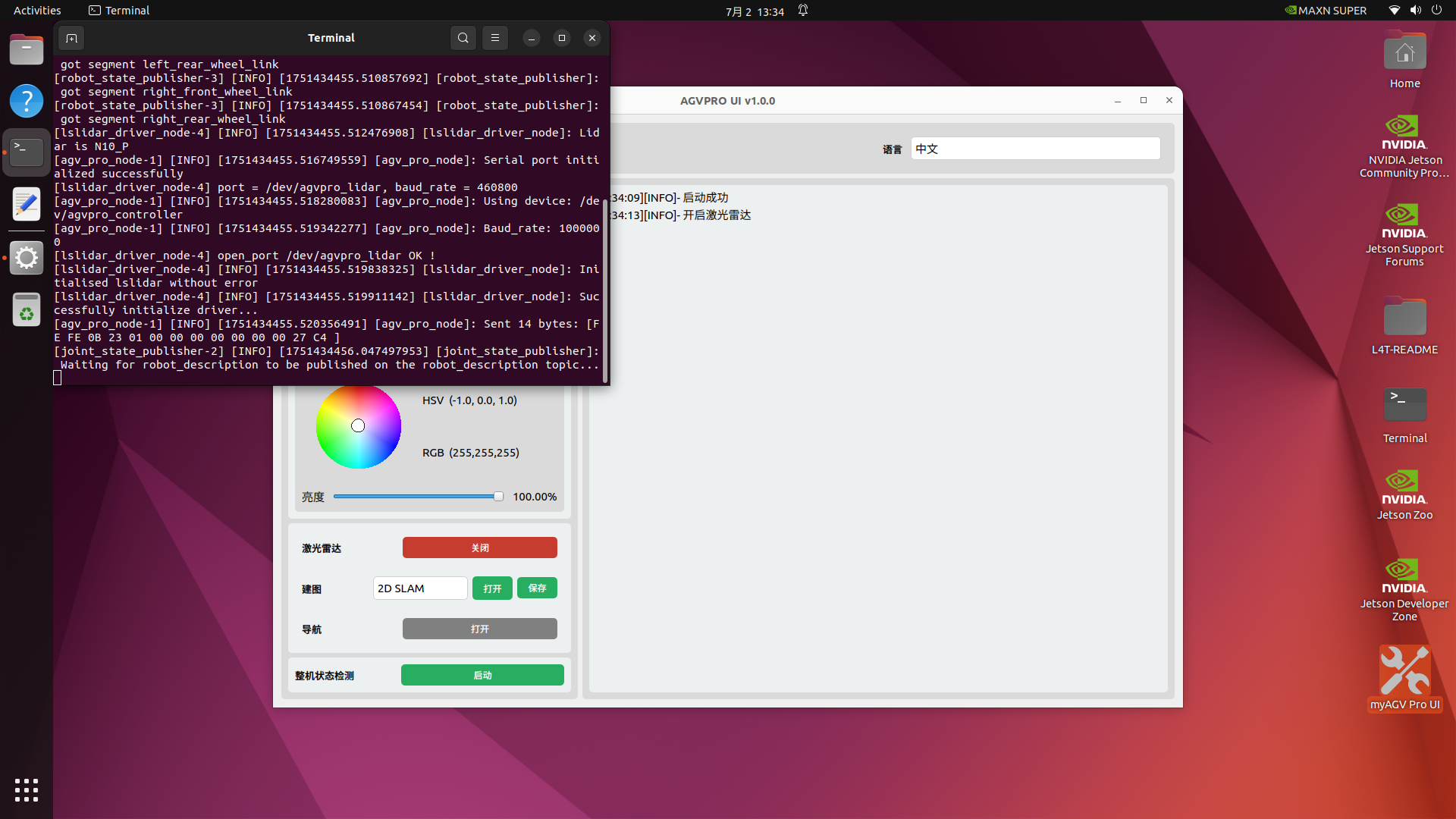
4.1 激光雷达:
点击ON按钮,激光雷达里程计启动。 点击OFF按钮,激光雷达里程计关闭。
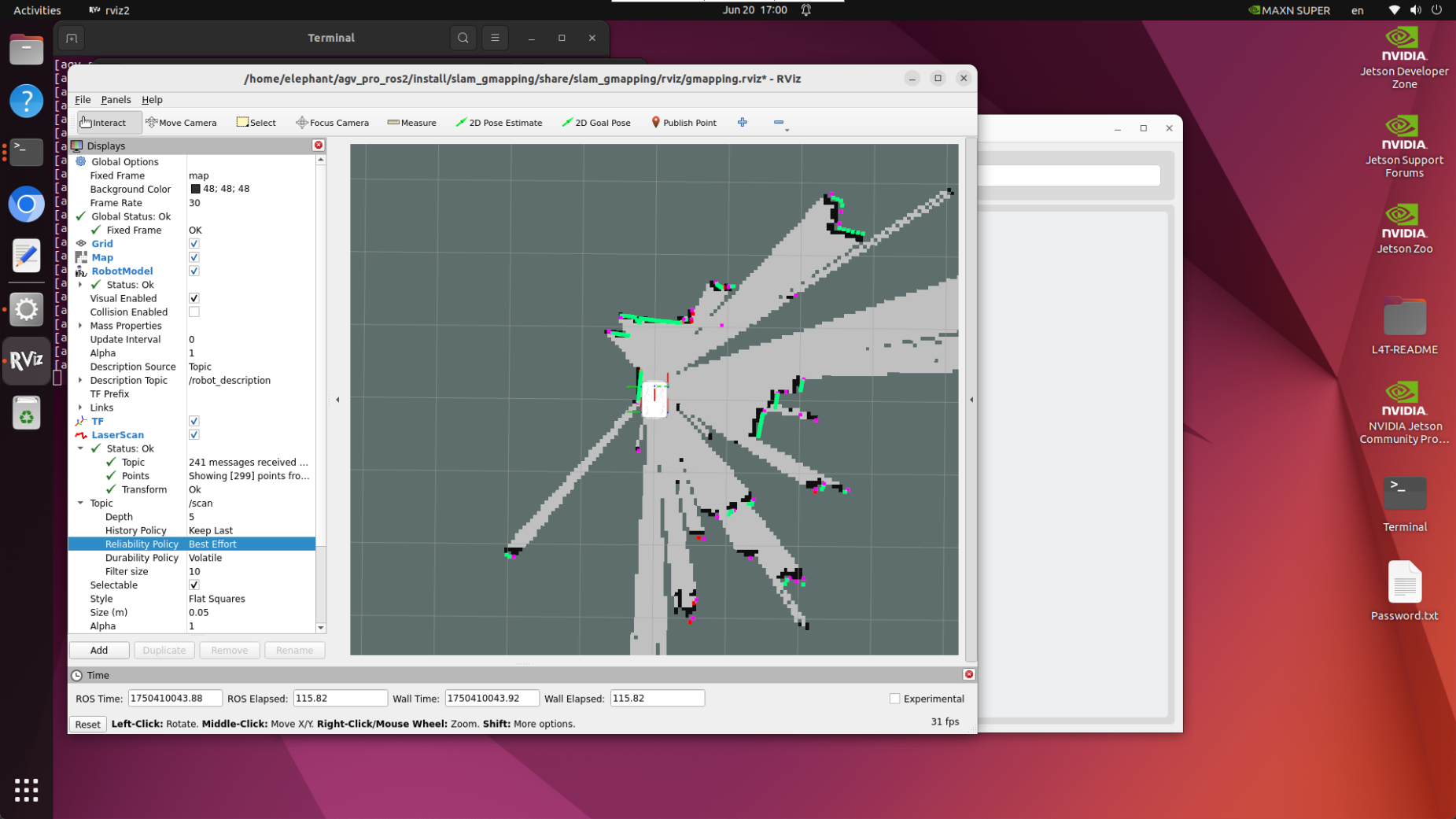
4.2 雷达建图:
4.2.1 2D建图:
启动2D建图时, 需要先确认激光雷达是否启动,若未启动,请先启动激光雷达。选择2D SLAM建图模式, 点击ON按钮,启动2D建图RVIZ仿真界面,可通过开启键盘控制来控制小车进行建图。
4.2.3 建图保存:
点击Save Map按钮,保存当前建图数据,保存路径为~/agv_pro_ros2/src/agv_pro_navigation2/map/。
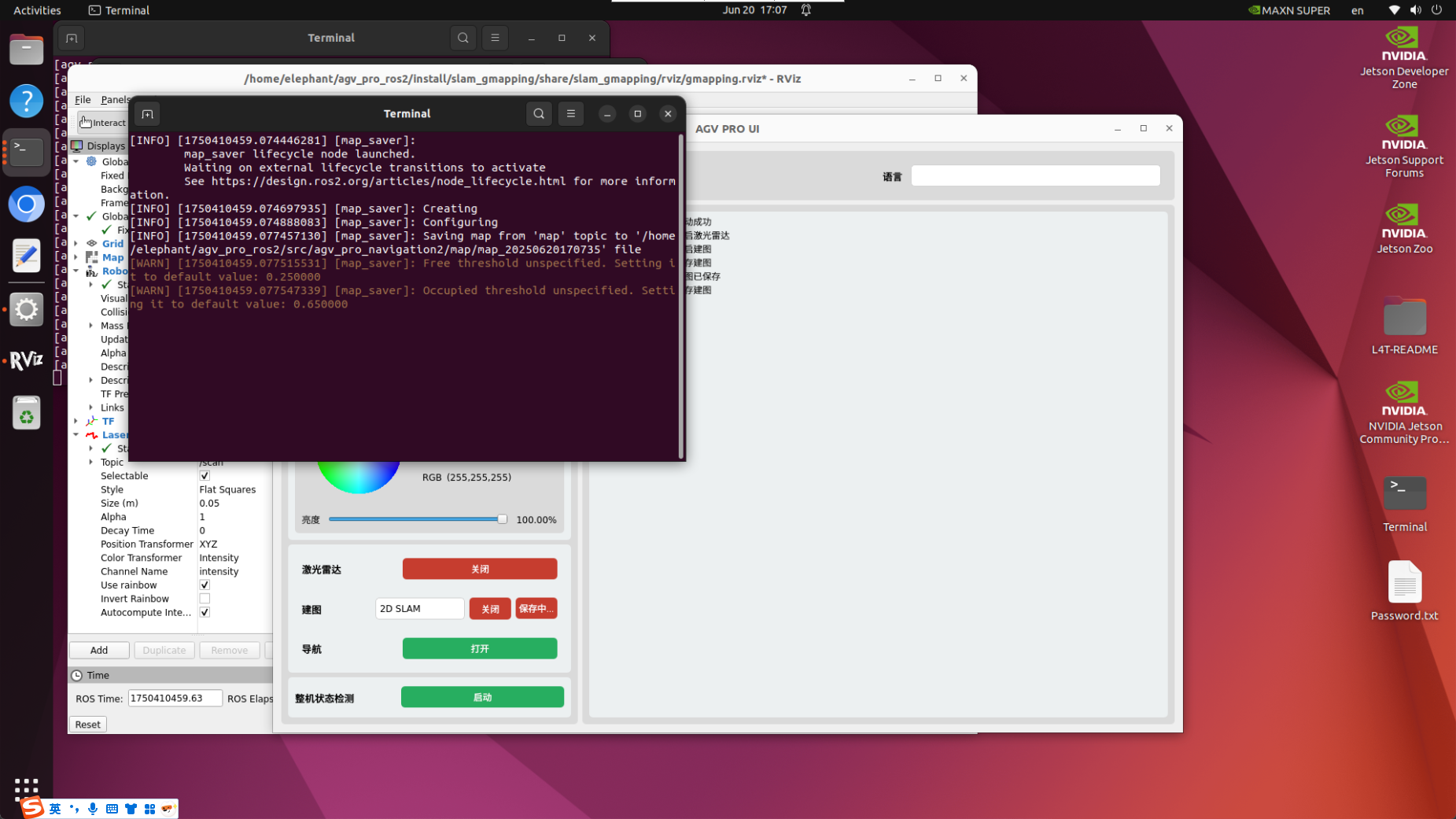
注意: 保存地图时,请确保激光雷达、建图已启动, 则无法保存建图。
4.3 雷达导航(暂不支持):
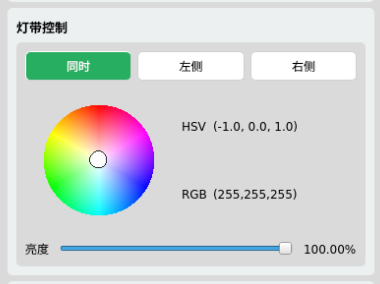
5. 灯带控制
实时控制小车两侧灯带,通过拖动色盘调整小车颜色, 通过拖动滑块调整小车两侧灯带亮度。并在侧边实时显示当前颜色的HSV/RGB色值。
6. 整机检测功能
点击ON按钮,启动整机检测功能,日志栏实时打印检测项目信息, 主要检测项目如下:
版本读取
- 系统版本
- 固件版本
- pymycobot版本信息
电机状态检测
- 读取电机使能状态
- 读取当前通讯模式
- 读取当前电机温度
- 读取当前电机力矩
- 读取当前电机悬空向前变速低中高速度信息
防撞条状态检测(暂不支持)
- 急停状态检测
实时读取急停状态,当急停状态切换时显示急停状态信息
注意: 在开始整机检测功能之前,请让小车四个轮子悬空,避免出现意外。
7. 多语言
点击Language选项框,切换语言,目前支持中文和英文。