多机控制
在使用多机控制前需要配置ros2多机通信功能。
下面以两台AGV Pro为例。在正式运行前,先确保两台机器和笔记本电脑能够互相通信。既同一局域网内。
注意事项 1.电脑需要装Ubuntu 22.04、ros2 2.如果使用虚拟机,则需要设置虚拟机的网络配置,电脑虚拟机设置-网络适配器-网络连接-桥接模式:直接连接物理网络
电脑 192.168.123.68
AGV Pro1 192.168.123.3
AGV Pro2 192.168.123.42
三台设备设置~/.bashrc 文件,添加下面两个参数,设置
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
export ROS_DOMAIN_ID=1
三台设备即可在ros2下进行多机通信。关于ros2 dds通信中间件的更多信息,可以查看此处。
启动多机控制
1.修改~/agv_pro_ros2/src/Lslidar_ROS2_driver/lslidar_driver/params/lidar_uart_ros2/lsn10p.yaml文件,增加agv_pro1:
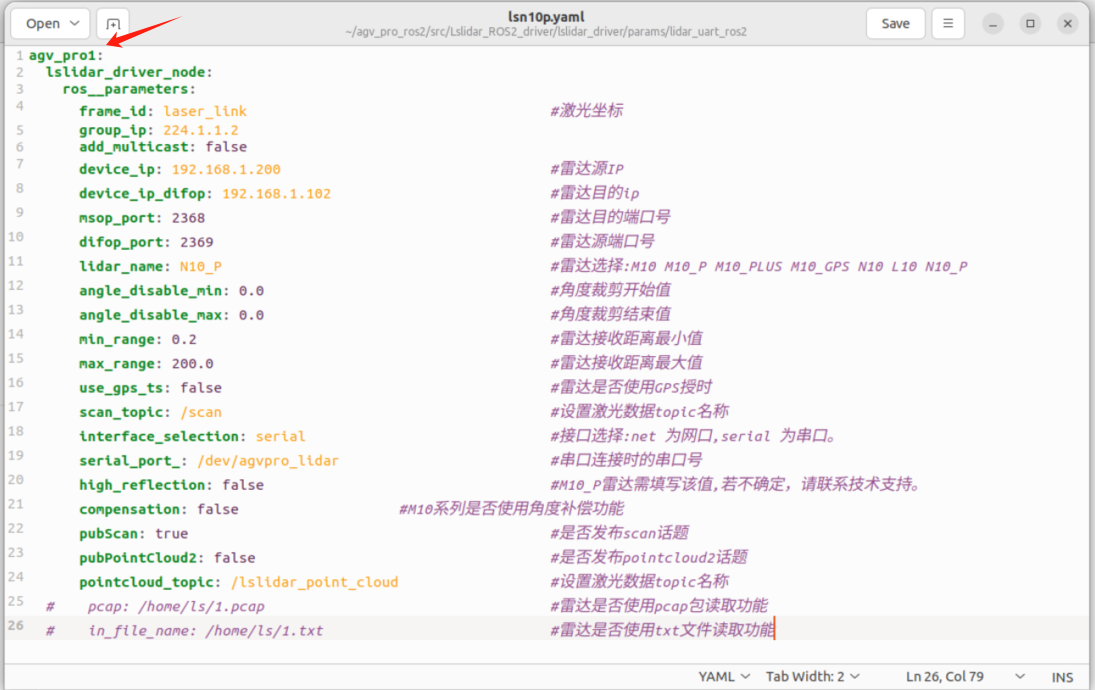
注意缩进格式
agv_pro1:
lslidar_driver_node:
ros__parameters:
frame_id: laser_link #激光坐标
group_ip: 224.1.1.2
add_multicast: false
device_ip: 192.168.1.200 #雷达源IP
device_ip_difop: 192.168.1.102 #雷达目的ip
msop_port: 2368 #雷达目的端口号
difop_port: 2369 #雷达源端口号
lidar_name: N10_P #雷达选择:M10 M10_P M10_PLUS M10_GPS N10 L10 N10_P
angle_disable_min: 0.0 #角度裁剪开始值
angle_disable_max: 0.0 #角度裁剪结束值
min_range: 0.2 #雷达接收距离最小值
max_range: 200.0 #雷达接收距离最大值
use_gps_ts: false #雷达是否使用GPS授时
scan_topic: /scan #设置激光数据topic名称
interface_selection: serial #接口选择:net 为网口,serial 为串口。
serial_port_: /dev/agvpro_lidar #串口连接时的串口号
high_reflection: false #M10_P雷达需填写该值,若不确定,请联系技术支持。
compensation: false #M10系列是否使用角度补偿功能
pubScan: true #是否发布scan话题
pubPointCloud2: false #是否发布pointcloud2话题
pointcloud_topic: /lslidar_point_cloud #设置激光数据topic名称
# pcap: /home/ls/1.pcap #雷达是否使用pcap包读取功能
# in_file_name: /home/ls/1.txt #雷达是否使用txt文件读取功能
例如
第一台AGV Pro,就改成agv_pro1:
第二台AGV Pro,就改成agv_pro2:
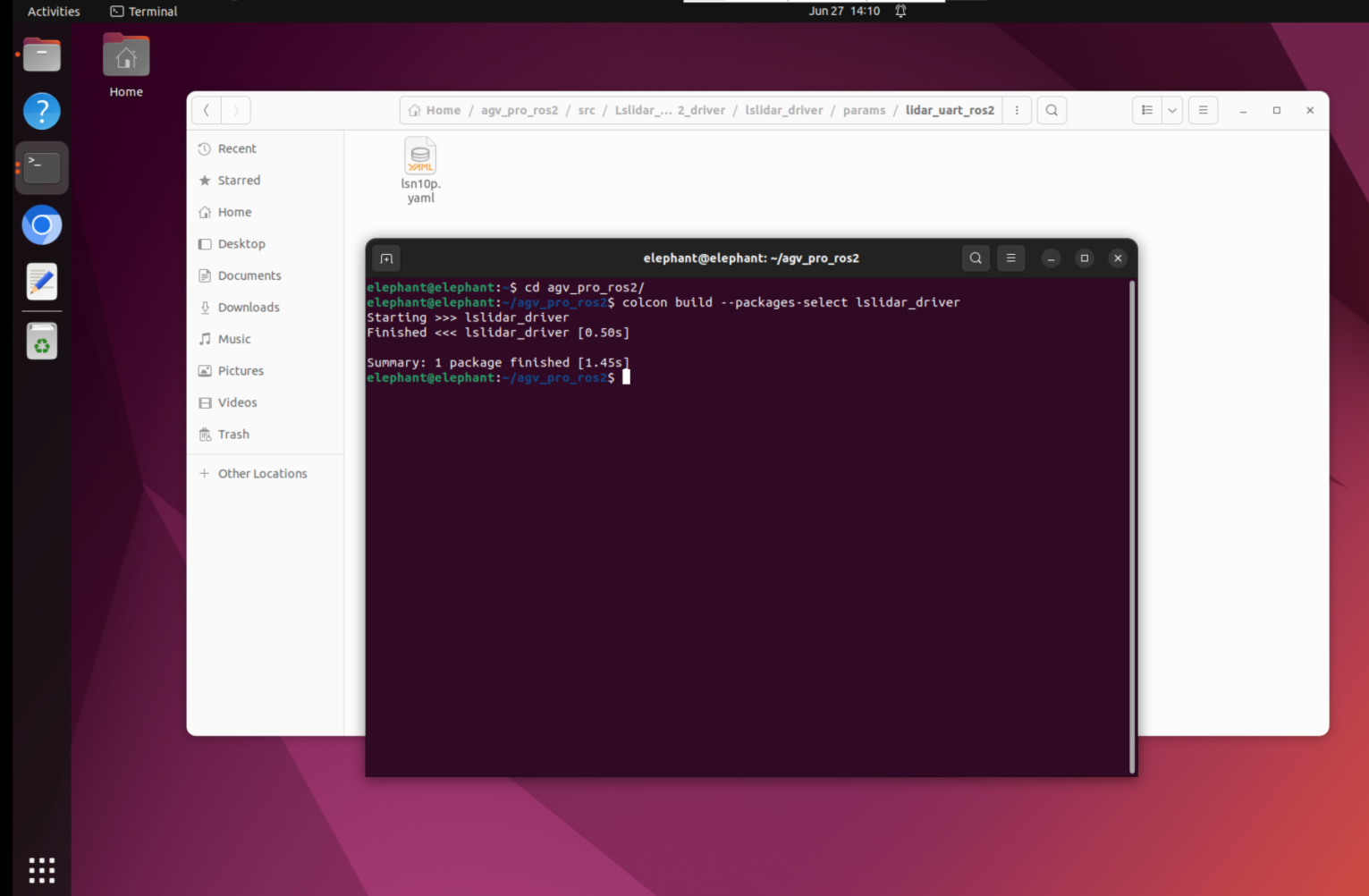
2.然后执行下面指令,编译激光雷达功能包,编译后记得source工作空间
cd agv_pro_ros2/
colcon build --packages-select lslidar_driver
source ~/agv_pro_ros2/install/local_setup.bash
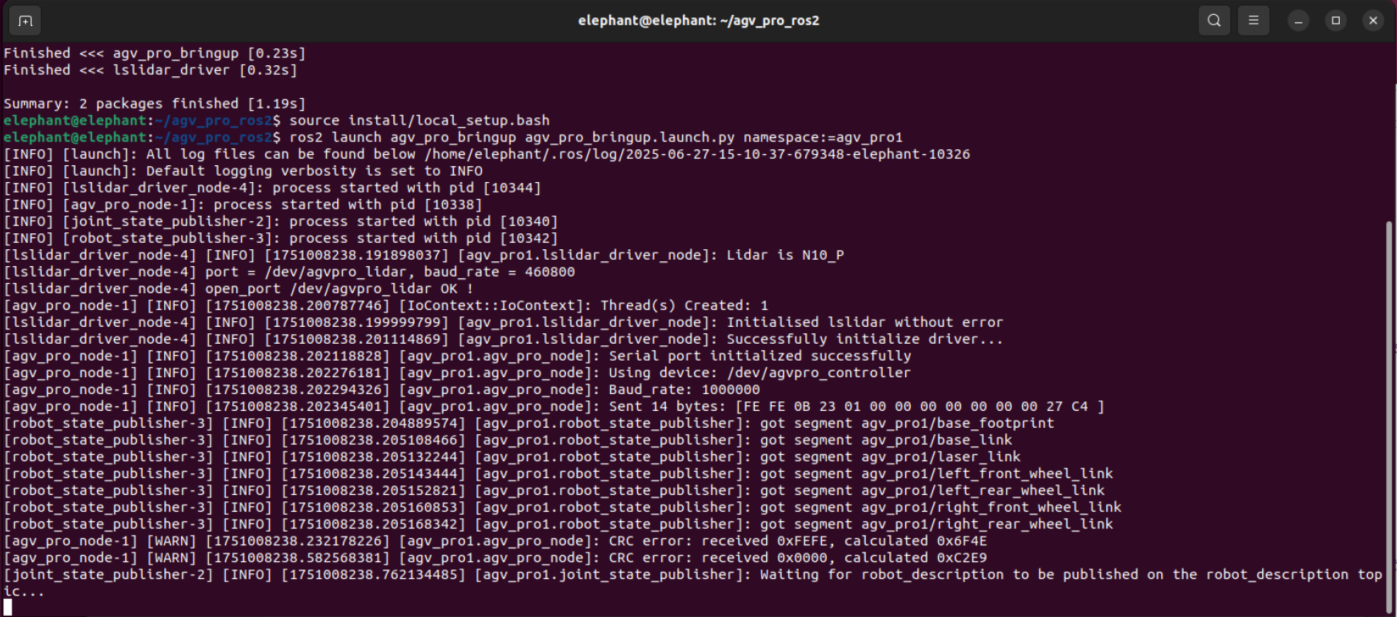
3.启动里程计和激光雷达节点
在启动时agv_pro_bringup.launch.py,增加namespace:=参数,区分AGV Pro
第一台AGV Pro,启动指令:ros2 launch agv_pro_bringup agv_pro_bringup.launch.py namespace:=agv_pro1
第二台AGV Pro,启动指令:ros2 launch agv_pro_bringup agv_pro_bringup.launch.py namespace:=agv_pro2
4.电脑启动键盘控制节点
电脑需要下载键盘功能包
sudo apt-get install ros-humble-teleop-twist-keyboard
启动键盘控制节点
ros2 run teleop_twist_keyboard teleop_twist_keyboard
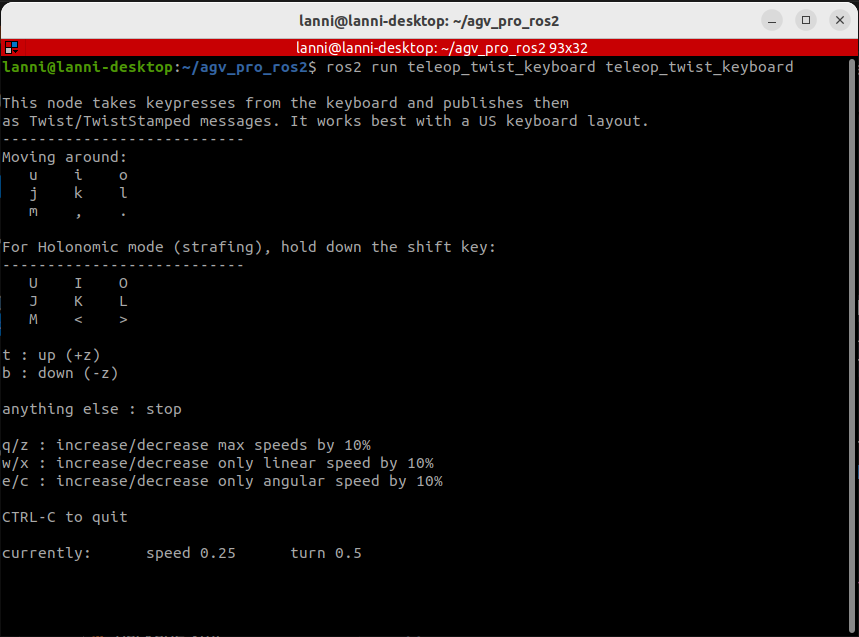
确保鼠标点击选中该终端,这样键盘控制才能控制AGV Pro。
注意事项: 1.为了避免造成机器损坏,运动前确保AGV Pro不会撞到其他物体 2.在运动过程中,AGV Pro ros2的键盘控制需要按下键盘'k'才能让AGV Pro停止运动。
---------------------------
Moving around:
u i o
j k l
m , .
For Holonomic mode (strafing), hold down the shift key:
---------------------------
U I O
J K L
M < >
t : up (+z)
b : down (-z)
anything else : stop
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
CTRL-C to quit
currently: speed 0.25 turn 0.5
| 按键 | 按键描述 |
|---|---|
| i | 向前移动 |
| , | 向后移动 |
| j | 原地逆时针旋转 |
| l | 原地顺时针旋转 |
| u | 左转弯前进 |
| o | 右转弯前进 |
| k | 停止移动 |
| m | 左转弯后退 |
| . | 右转弯后退 |
| I | 向前移动 |
| < | 向后移动 |
| J | 向左平移 |
| L | 向右平移 |
| U | 向左45°斜向前行 |
| O | 向右45°斜向前行 |
| M | 向左45°斜向后退 |
| > | 向右45°斜向后退 |
| q | 提高线速度和角速度 |
| z | 降低线速度和角速度 |
| w | 提高线速度 |
| x | 降低线速度 |
| e | 增加角速度 |
| c | 降低角速度 |
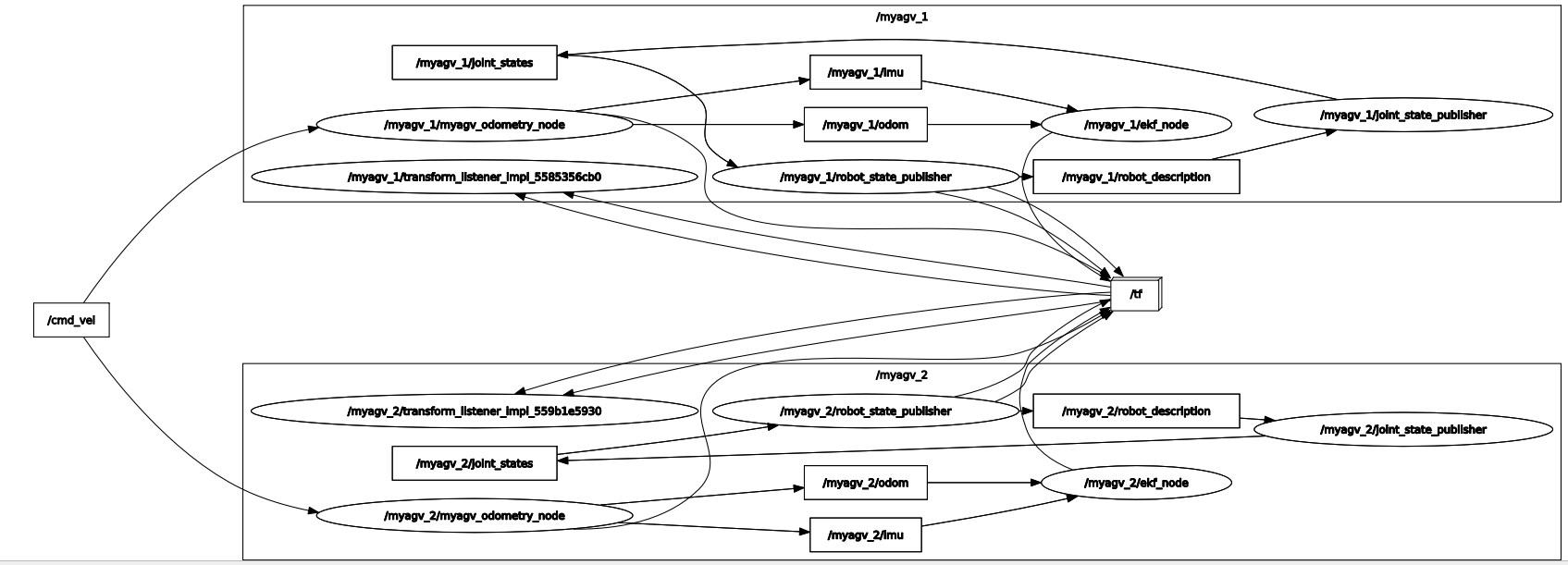
同时可以终端输入rqt_graph查看节点信息,在同一局域网内,agv_pro1和agv_pro2同时接收笔记本发布/cmd_vel话题,实现多机控制功能。