家居收纳训练
1. 硬件部署
1.1 硬件清单
| 名称 | 数量 | 备注 |
|---|---|---|
| 外接固定板 | 1 | |
| M5滑块螺母 | 4 | |
| M5*10螺丝 | 4 | |
| MyArm M750 | 1 | |
| myAGV Pro 导航-视觉版 | 1 | |
| 无线手柄 | 1 | |
| USB线缆 | 1 | |
| 扳手工具 | 1 | |
| XT60转接线 | 1 |
1.2 硬件连接
- 使用M5*10螺丝将M5滑块螺母固定在外接固定板上

- 将外接固定板连接到myAGVPro上的2040型材
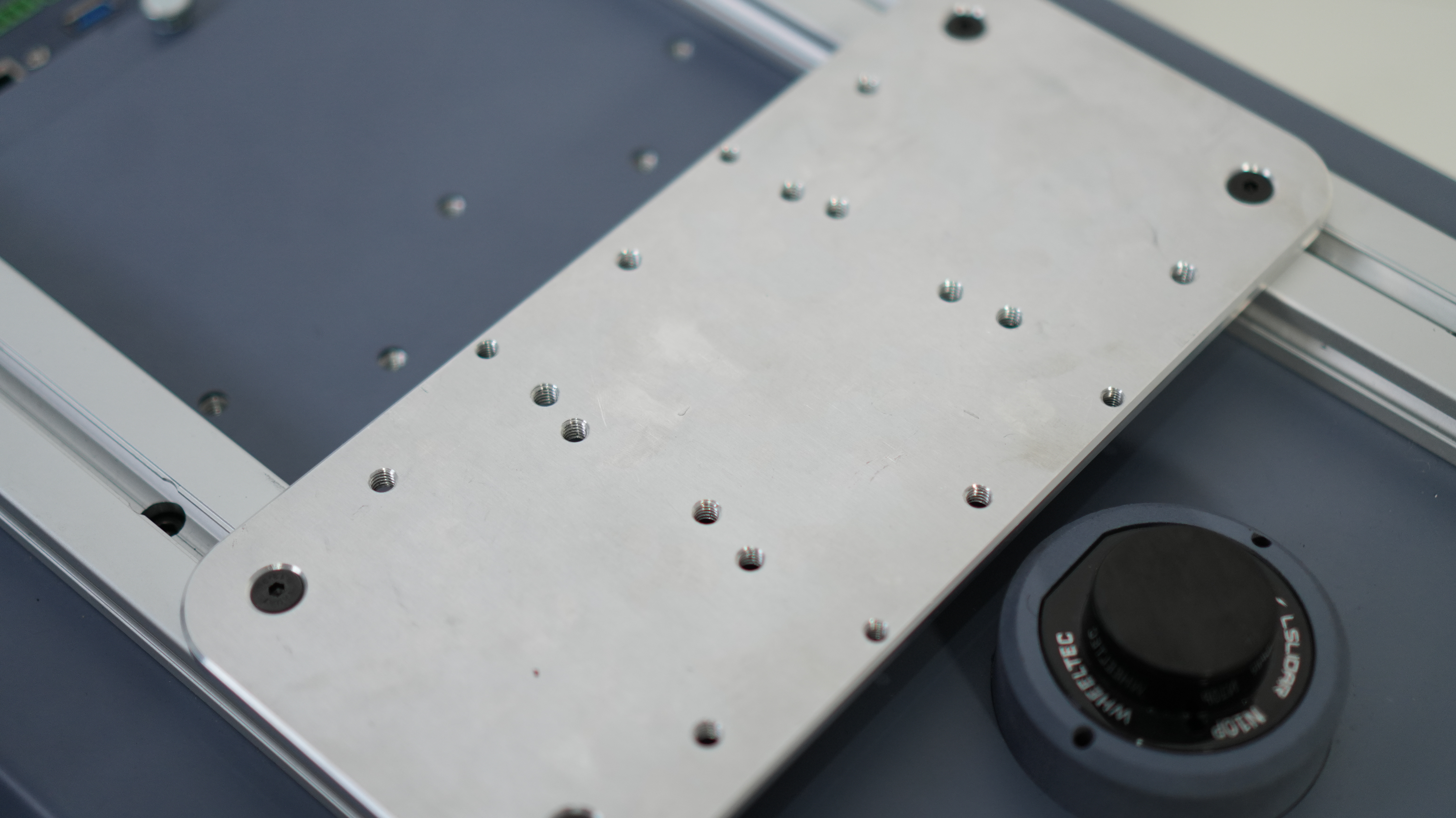
- 将myArm M750 底座与外接固定板上的螺丝孔位对齐
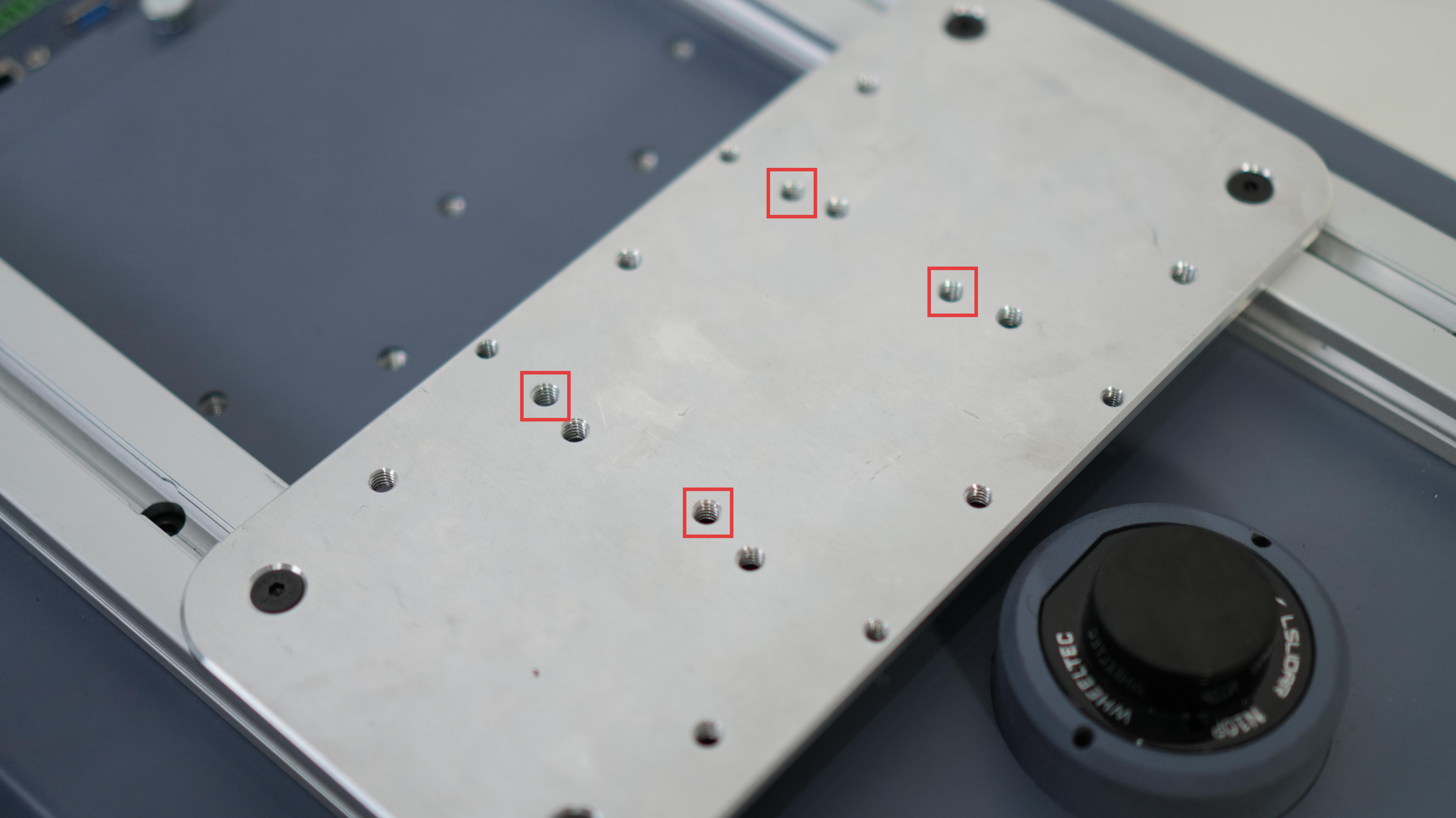
- 将myArm M750 底座固定在外接固定板上
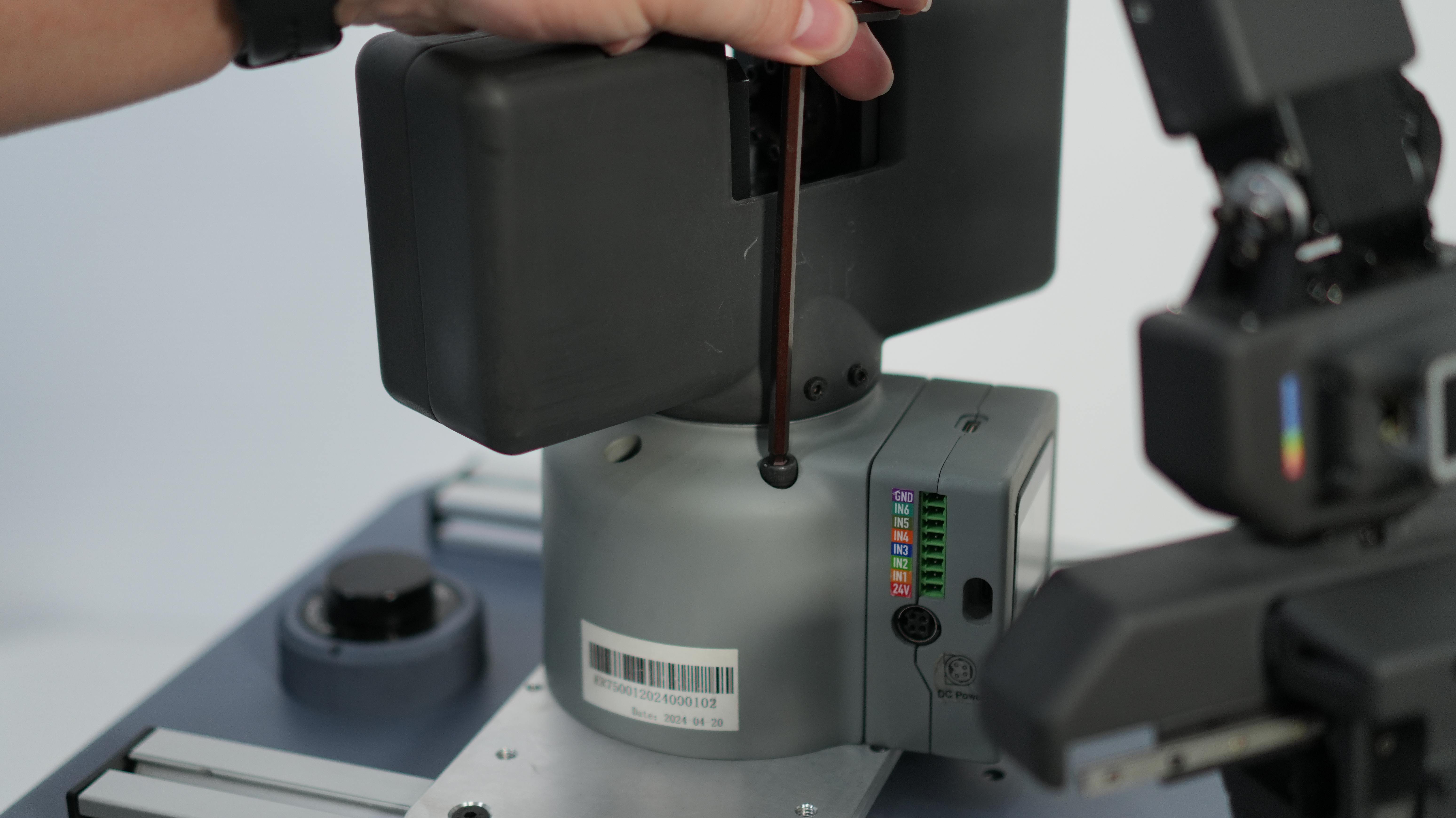
- 连接急停

- 使用XT60转接线连接至myArm M750

- 将另一端与myAGV Pro上XT60供电口连接

- 启动 myAGV Pro, 需要先将急停松开, 然后按下电源开关

- 启动myArmM750, 同样需要先将急停松开, 然后按下电源开关, 等待MyArmM750启动完成
- 使用
Type-C线连接myArm M750与myAGV Pro

- 至此,MyArm M750与myAGV Pro硬件连接完成, 成品如下所示:

2. 软件部署
2.1 MyArm M750固件烧录
通过访问M750烧录和更新固件 章节进行烧录固件
2.2 myAGVPro固件烧录
通过访问myAGVPro如何刻录固件章节进行烧录固件
3. 源码下载
将家居收纳训练-MyArm M750手柄控制源码下载到本地
3.1 下载源码
- 使用git工具将源码下载到本地
git clone https://github.com/elephantrobotics/pymycobot.git ` 使用浏览器访问网址下载源码压缩包
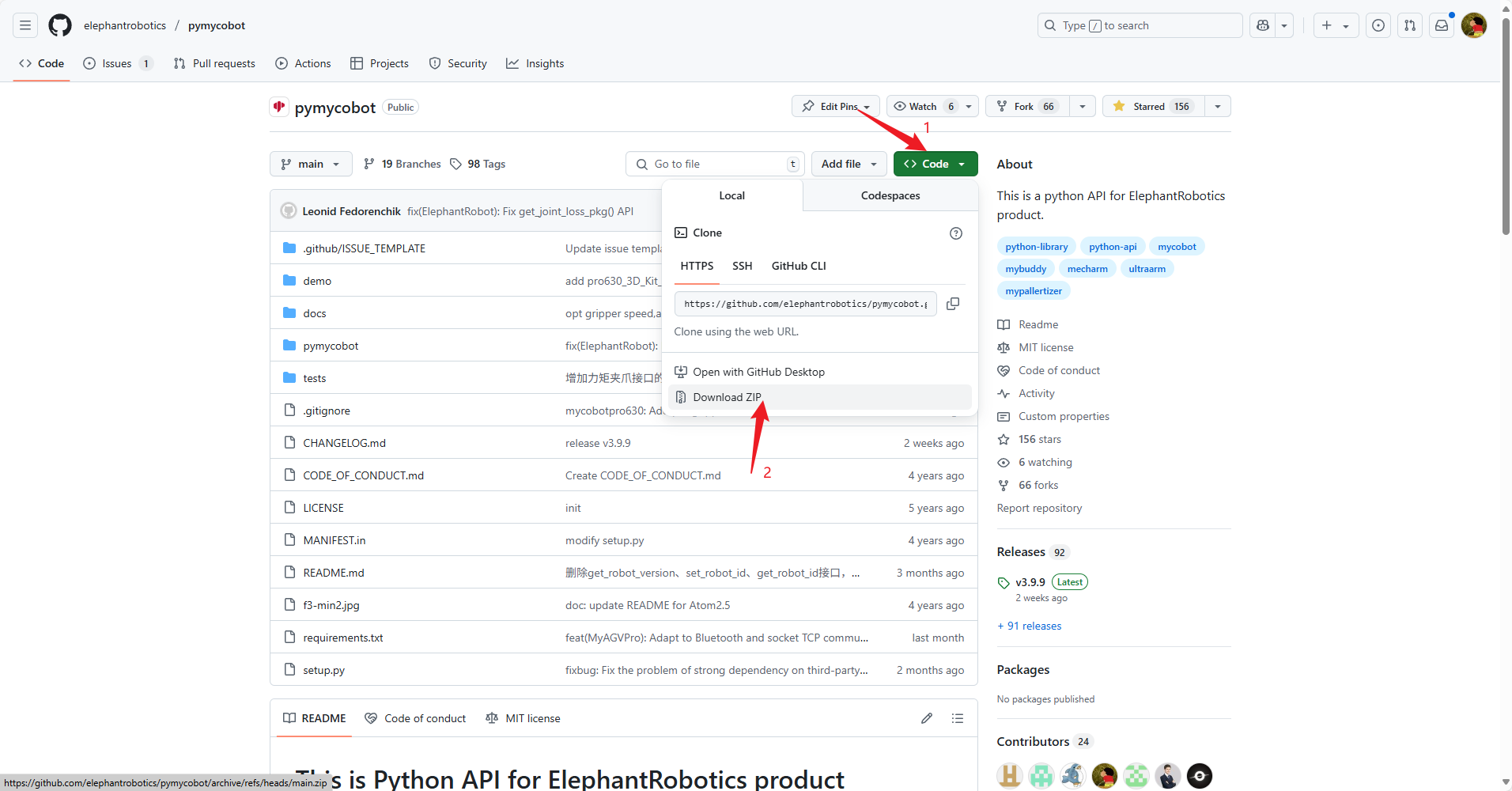
- 点击
Code按钮 - 点击
Download ZIP按钮 - 下载完成后解压到本地
3.2 进入myAGVPro_Composite_Kit目录
使用cd指令进入pymycobot/demo/myAGVPro_Composite_Kit目录下
cd pymycobot/demo/myAGVPro_Composite_Kit
3.3 下载依赖
使用pip指令下载依赖
pip install -r requirements.txt
3.4 修改配置
打开
main.py文件, 将COMPOSITE_KIT_TYPE的值修改成MyArmM750... # ############################################################################################## # Composite kit configuration # ############################################################################################## COMPOSITE_KIT_TYPE = "MyArmM750" # MyCobotPro630, MyCobot320, MyArmM750, Undefined DEBUG = False ...配置
MyArmM750串口, 通过ls /dev/tty*命令查看, 正常情况下默认为/dev/ttyACM2... # ############################################################################################## # MyCobot M750 and MyCobot 320 Configuration # ############################################################################################## COMPOSITE_KIT_COMPORT = "/dev/ttyACM2" ...
3.5 运行源码
使用python指令运行源码
python main.py
4. 快速体验
myAGV pro + MyArm M750手柄控制功能定义如下:

注意: 在程序启动前需要先把手柄的接收器接入myAGV Pro的
USB口, 程序启动后, 当手柄的接收器断开连接时, 程序会自动退出