串口通信协议
1 支持机型
标配版、高配版MyAGVPro
2 USB通信设置
- 波特率: 1000000
- 数据位: 8
- 奇偶校验位: none
- 停止位: 1
主线接口:
标配版:PC与主控通信,USB Type-C连接PC与AGVPro,如下图所示:
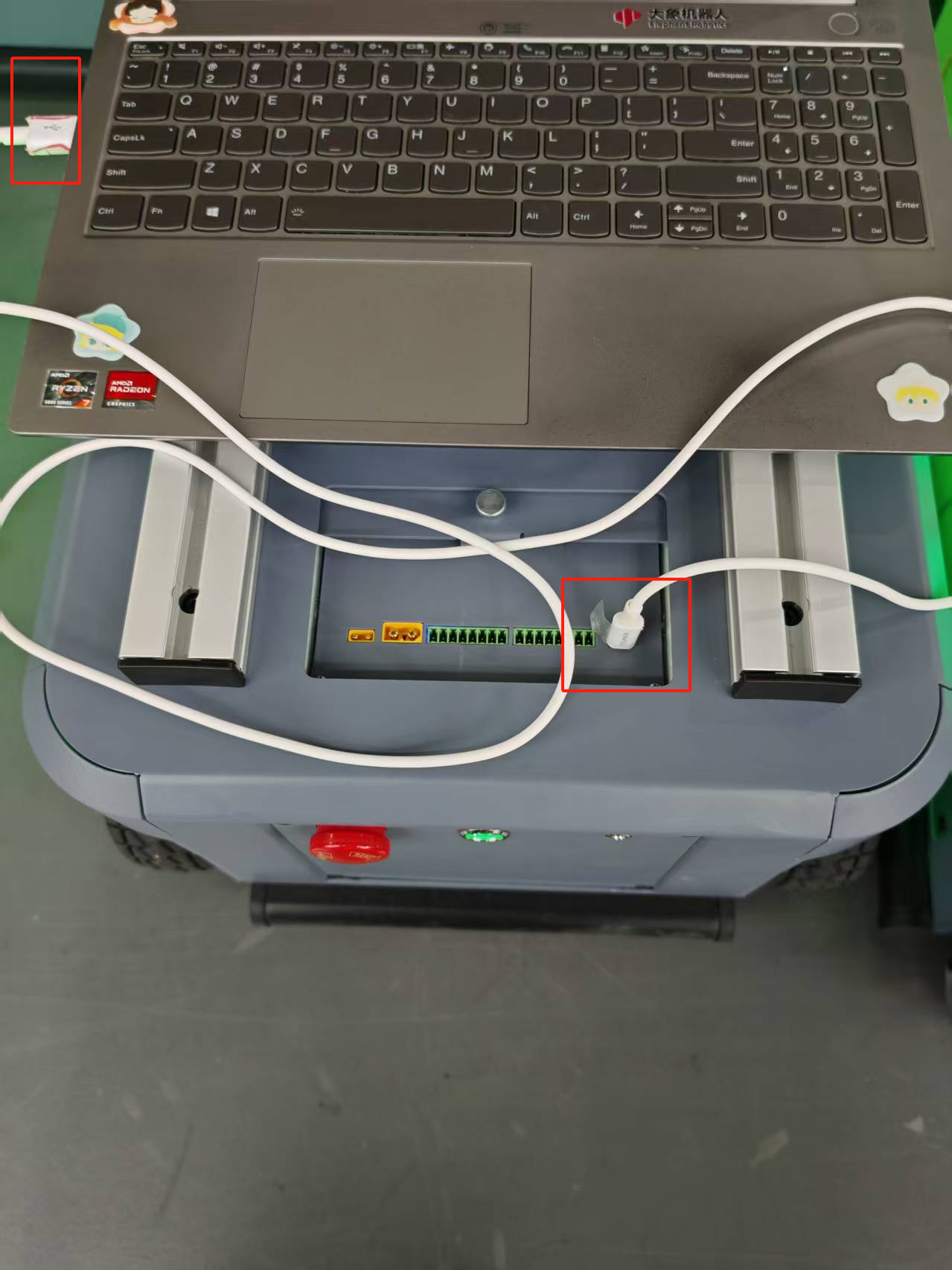
高配版:Jetson Orin Nano与主控通信,无需额外接线
通信频率:95%接口,串口通信频率100HZ
3 协议的发送和接收格式
发送和接收都以十六进制表示。每条命令应包含 5 个部分,如下所示:
1 帧头:0xFE 0xFE
2 有效长度:固定为0x0B
3 功能码:0 ~ 0x53
4 数据位:固定8字节,不足补0
5 帧尾: crc16-modbus,高字节在前
4 协议解释
设置接口除启动机器外,默认返回1,byte1为1,表示接收到指令。
| 类型 | 数据 | 字节 | 功能 |
|---|---|---|---|
| 指令框架 | 开始位: 0 | 1 | 起始帧识别,0XFE |
| 开始位: 1 | 1 | 起始帧识别,0XFE | |
| 位数据长度 | 1 | 长度固定为8 | |
| 指令位 | 1 | 取决于不同的命令 | |
| 指令框架 | 数据 | 8 | 命令与数据,取决于不同的命令 |
| 结束框架 | 结束位: 0 | 1 | 停止位,crc16_modbus 高字节 |
| 结束位: 1 | 1 | 停止位,crc16_modbus 低字节 |
5 单一指令说明
启动机器
默认通电会自动启动机器,启动机器成功才可以控制AGVPro运动,未启动或者启动失败,可读取版本等信息。
功能码:0x10
示例:
串口发送:byte1-8:0
FE FE 0B 10 00 00 00 00 00 00 00 00 1A 45
串口返回:返回时间<=2.1s;状态位范围,1-5:
- 1-正常
- 2-急停拍下
- 3-电量过低,低于正常启动值
- 4-can初始化异常
- 5-电机初始化异常
启动成功:
FE FE 0B 10 01 00 00 00 00 00 00 00 D6 84
发送说明:
| 数据域 | 说明 | 数据 |
|---|---|---|
| Data[0] | 识别帧 | 0XFE |
| Data[1] | 识别帧 | 0XFE |
| Data[2] | 数据长度帧 | 0X0B |
| Data[3] | 指令帧 | 0X10 |
| Data[4] | 数据帧 | 0X00 |
| Data[5] | 数据帧 | 0X00 |
| Data[6] | 数据帧 | 0X00 |
| Data[7] | 数据帧 | 0X00 |
| Data[8] | 数据帧 | 0X00 |
| Data[9] | 数据帧 | 0X00 |
| Data[10] | 数据帧 | 0X00 |
| Data[11] | 数据帧 | 0X00 |
| Data[12] | 结束帧 | 0X1A |
| Data[13] | 结束帧 | 0X45 |
返回说明:
| 数据域 | 说明 | 数据 |
|---|---|---|
| Data[0] | 识别帧 | 0XFE |
| Data[1] | 识别帧 | 0XFE |
| Data[2] | 数据长度帧 | 0X0B |
| Data[3] | 指令帧 | 0X10 |
| Data[4] | 数据帧 | 0X01 |
| Data[5] | 数据帧 | 0X00 |
| Data[6] | 数据帧 | 0X00 |
| Data[7] | 数据帧 | 0X00 |
| Data[8] | 数据帧 | 0X00 |
| Data[9] | 数据帧 | 0X00 |
| Data[10] | 数据帧 | 0X00 |
| Data[11] | 数据帧 | 0X00 |
| Data[12] | 结束帧 | 0XD6 |
| Data[13] | 结束帧 | 0X84 |
读取主版本号
功能码:0x02
示例:
串口发送:byte1-8:0
FE FE 0B 02 00 00 00 00 00 00 00 00 BA 91
串口返回:byte1:版本,需要/10
FE FE 0B 02 10 00 00 00 00 00 00 00 B6 90
此返回,主版本为1.0
读取机器状态
功能码:0x05
示例:
串口发送:byte1-8:0
FE FE 0B 05 00 00 00 00 00 00 00 00 8A B7
串口返回:byte1:整机状态;byte2:电池电量,/10;byte3-8:0
整机状态说明:bit0:急停、bit1未上电、bit2防撞条1、bit3防撞条2、bit4 1号电机连接状态、bit5 2号电机连接状态、bit6 3号电机连接状态、bit7 4号电机连接状态(0-正常)
例如:
FE FE 0B 05 00 F0 00 00 00 00 00 00 85 47
此返回,1-4电机正常,电池电压24V
机器仅通电
功能码:0x19
仅通电状态下,机器无法运动,可使用接口:启动机器人、查询机器启动状态、读取主版本号、读取机器状态。
示例:
串口发送:byte1-8:0
FE FE 0B 19 00 00 00 00 00 00 00 00 4A 2F
串口返回:返回时间:<= 2.1s,byte1-8:0
FE FE 0B 19 01 00 00 00 00 00 00 00 86 EE
关闭机器
功能码:0x11
关闭机器后,可用功能与仅通电一致,轮子放松。
示例:
串口发送:byte1-8:0
FE FE 0B 11 00 00 00 00 00 00 00 00 E7 1C
串口返回:byte1-8:0
FE FE 0B 11 01 00 00 00 00 00 00 00 46 89
查询机器启动状态
功能码:0x12
示例:
串口发送:byte1-8:0
FE FE 0B 12 00 00 00 00 00 00 00 00 7A 5C
串口返回:byte1: 状态0/1,0-启动失败,1-启动成功;byte2-8:0
成功:
FE FE 0B 12 01 00 00 00 00 00 00 00 B6 9D
机器运动
功能码:0x21
前进、后退、左平移、右平移、顺时针旋转、逆时针旋转。
示例:
串口发送:byte1-2:100,前后,+前-后,1.5m/s,byte3-4:100,左右,+左-右,1m/s,byte5-6:*100,旋转,+顺时针-逆时针,byte7-8:0
1m/s前进:
FE FE 0B 21 00 64 00 00 00 00 00 00 4D 39
0.5m/s右平移:
FE FE 0B 21 00 00 FF CE 00 00 00 00 54 61
0.1m/s顺时针旋转:
FE FE 0B 21 00 00 00 00 00 0A 00 00 89 3C
串口返回:byte1:1;byte2-8:0
FE FE 0B 21 01 00 00 00 00 00 00 00 47 DD
数据位全部给0,可停止运动
停止运动
功能码:0x22
示例:
串口发送:byte1-8:0
FE FE 0B 22 00 00 00 00 00 00 00 00 7B 08
串口返回:byte1:1;byte2-8:0
FE FE 0B 22 01 00 00 00 00 00 00 00 B7 C9
设置自动上发状态
功能码:0x23
示例:
串口发送:byte1:状态0/1,0-关闭;1-开启,默认不开启;2-8:0
开启自动上发:
FE FE 0B 23 01 00 00 00 00 00 00 00 27 C4
串口返回:byte1:1;byte2-8:0
FE FE 0B 23 01 00 00 00 00 00 00 00 27 C4
获取自动上发状态
功能码:0x24
示例:
串口发送:byte1-8:0
FE FE 0B 24 00 00 00 00 00 00 00 00 DB 23
串口返回:byte1:0/1;byte2-8:0
例如:
FE FE 0B 24 01 00 00 00 00 00 00 00 17 E2
自动上发内容说明
功能码:0x25
自动上发频率:20HZ
- byte1-3:线速度,/100
- byte4:整机状态, bit0:急停、bit1未启动机器、bit2防撞条1、bit3防撞条2、bit4 1号电机连接状态、bit5 2号电机连接状态、bit6 3号电机连接状态、bit7 4号电机连接状态(0-正常)
- byte5:电机报错,bit0-1号轮、bit1-2号轮、bit2-3号轮、bit3-4号轮(0-正常),当电机报错时可使用
- byte6:电池电压 /10
- byte7:使能状态,0-使能,如果有轮子掉使能,此状态位置为1
- byte8:0
串口返回例如:
此返回,电机正常,电池电压21VFE FE 0B 25 00 00 00 00 00 D2 00 00 4B 2E
设置电机使能状态
功能码:0x30
示例:
串口发送:byte1,ID,1-4/254,254表示所有;byte2,状态0/1,0-失能,1-使能;byte3-8:0
1号轮使能:
FE FE 0B 30 01 01 00 00 00 00 00 00 D7 0D
所有轮子失能:
FE FE 0B 30 FE 00 00 00 00 00 00 00 13 52
串口返回:byte1:1;byte2-8:0
FE FE 0B 30 01 00 00 00 00 00 00 00 17 1D
读取所有电机状态
功能码:0x31
示例:
串口发送:byte1-8:0
FE FE 0B 31 00 00 00 00 00 00 00 00 4B D1
串口返回:byte1-4:1-4电机状态;byte2-8:0
电机状态:0-正常;> 0 异常:
- bit1 欠压
- bit2 驱动异常
- bit3 过温
- bit4:磁编码异常
- bit5:过载
- bit6:未标定
例如:
此返回,1-4电机正常FE FE 0B 31 00 00 00 00 00 00 00 00 4B D1
读取所有电机温度
功能码:0x35
示例:
串口发送:byte1-8:0
FE FE 0B 35 00 00 00 00 00 00 00 00 8B E3
串口返回:byte1-8:4X2电机温度,/10
例如:
FE FE 0B 35 01 2C 01 2C 01 2C 01 2C EA 9F
此返回,1-4电机温度:30°
读取所有电机转速
功能码:0x36
示例:
串口发送:byte1-8:0
FE FE 0B 36 00 00 00 00 00 00 00 00 7B F7
串口返回:byte1-8:4X2电机转速,/100,范围:+-44rad/s
例如:
FE FE 0B 36 03 F4 03 F4 03 F4 03 F4 86 F3
此返回,1-4电机转速:10.12rad/s
读取所有电机力矩
功能码:0x37
示例:
串口发送:byte1-8:0
例如:
FE FE 0B 37 00 00 00 00 00 00 00 00 EB FA
串口返回:byte1-8:4X2电机力矩,/100,范围:+-17N
例如:
FE FE 0B 37 01 2C 01 2C 01 2C 01 2C 8A 86
此返回,1-4电机力矩:3N
读取所有电机使能情况
功能码:0x38
示例:
串口发送:byte1-8:0
FE FE 0B 38 00 00 00 00 00 00 00 00 1B BB
串口返回:byte1-4:4X1电机使能情况,0/1,0-失能,1-使能;byte5-8:0
例如:
FE FE 0B 38 01 01 01 01 00 00 00 00 06 56
设置通信模式
功能码:0x32
示例:
串口发送:byte1:模式,0-2,默认0;byte2-8:0
模式:0-串口,1-wifi,2-蓝牙;除串口模式外,其它模式切换后,此条语句无返回为正常现象。
例如:
FE FE 0B 32 02 00 00 00 00 00 00 00 62 44
串口返回:设置为蓝牙模式,先返回ASCII码蓝牙地址,ASCII码,帧头:“AGVPro:BLE:MAC:”;帧尾:“;\r\n”
例如:
AGVPro:BLE:MAC:0c:8b:95:bd:0a:ce;\r\n
读取通信模式
功能码:0x33
示例:
串口发送:byte1-8:0
FE FE 0B 33 00 00 00 00 00 00 00 00 2B C8
串口返回:byte1:模式,0-2;byte2-8:0
例如:
FE FE 0B 33 01 00 00 00 00 00 00 00 E7 09
DIY灯带
可设置左右灯带的颜色、亮度。
功能码:0x34
示例:
串口发送:byte1:左/右灯带;byte2:亮度,0-255;byte3-5:RGB;byte6-8:0
例如:
FE FE 0B 34 01 FA FF 00 00 00 00 00 D7 61
串口返回:byte1:模式,0-2;byte2-8:0
例如:
FE FE 0B 34 01 00 00 00 00 00 00 00 D7 2F
设置灯带模式
功能码:0x3A
示例:
串口发送:byte1:模式,0/1,0-电量显示,1-DIY;byte2-8:0
例如:
FE FE 0B 3A 01 00 00 00 00 00 00 00 B7 63
串口返回:byte1:1;byte2-8:0
例如:
FE FE 0B 3A 01 00 00 00 00 00 00 00 B7 63
设置输出引脚状态
功能码:0x40
示例:
串口发送:byte1:引脚号,1-6;byte2:状态,0/1,1-高电平,0-低电平;byte3-8:0
例如:
FE FE 0B 40 01 01 00 00 00 00 00 00 15 68
串口返回:byte1:1;byte2-8:0
例如:
FE FE 0B 40 01 00 00 00 00 00 00 00 D5 78
读取输入引脚状态
功能码:0x41
示例:
串口发送:byte1:引脚号,1-6/254,254-急停按钮;byte2-8:0
例如:
FE FE 0B 41 01 00 00 00 00 00 00 00 45 75
串口返回:引脚号,1-6;byte2:状态,0/1/255,255-不存在的引脚;byte3-8:0
例如:
FE FE 0B 41 01 01 00 00 00 00 00 00 85 65
读取WIFI账号密码
功能码:0x50
示例:
串口发送:byte1-8:0
FE FE 0B 50 00 00 00 00 00 00 00 00 D9 74
串口返回:ASCII码,帧头:“AGVPro:WIFI:”;帧尾:“;\r\n”
固定返回:
AGVPro:WIFI:S:ElephantAGVPro-AP2.4G;P:elephant;\r\n
读取WiFi ip、端口号
功能码:0x51
示例:
串口发送:byte1-8:0
FE FE 0B 51 00 00 00 00 00 00 00 00 49 79
串口返回:ASCII码,帧头:“AGVPro:WIFI:”;帧尾:“;\r\n”
固定返回:
AGVPro:WIFI:IP:192.168.4.1;PORT:9000;\r\n
读取蓝牙名称、uuid
功能码:0x52
示例:
串口发送:byte1-8:0
FE FE 0B 52 00 00 00 00 00 00 00 00 B9 6D
串口返回:ASCII码,帧头:“AGVPro:BLE::”;帧尾:“;\r\n”
固定返回:
AGVPro:BLE::Name:BLE-Elephant-AGVPro;Service_UUID:9a95aa42-ba2f-4bd0-8296-73c0c89c0871;CHAR_UUID:d886e992-a18a-4dc3-9362-2fc15b4b576a;\r\n
读取蓝牙地址
功能码:0x53
示例:
串口发送:byte1-8:0
FE FE 0B 53 00 00 00 00 00 00 00 00 29 60
串口返回:ASCII码,帧头:“AGVPro:BLE:MAC:”;帧尾:“;\r\n”
例如:
AGVPro:BLE:MAC:0c:8b:95:bd:0a:ce;\r\n