4.1 基础版
4.1.1 物料清单:
| 名称 | 数量 |
|---|---|
| myAGV Pro整机 | 1 |
| 无线手柄 | 1 |
| USB线缆 | 1 |
| 扳手工具 | 1 |
| 产品画册 | 1 |
4.1.2 windows快速体验
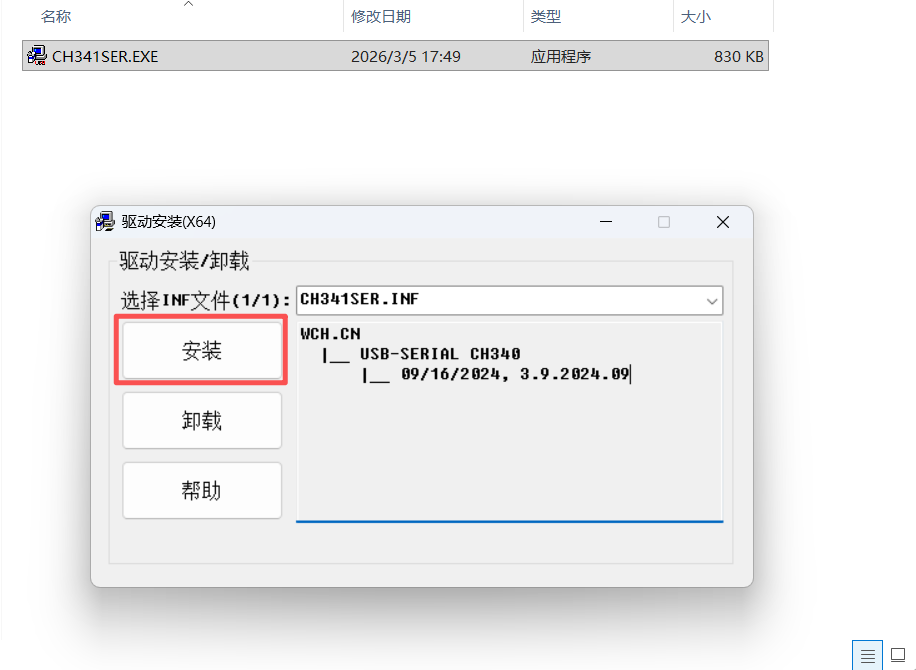
需要在您的电脑上安装CH340串口驱动,安装方法请参考如下:
1.下载CH341SER.EXE
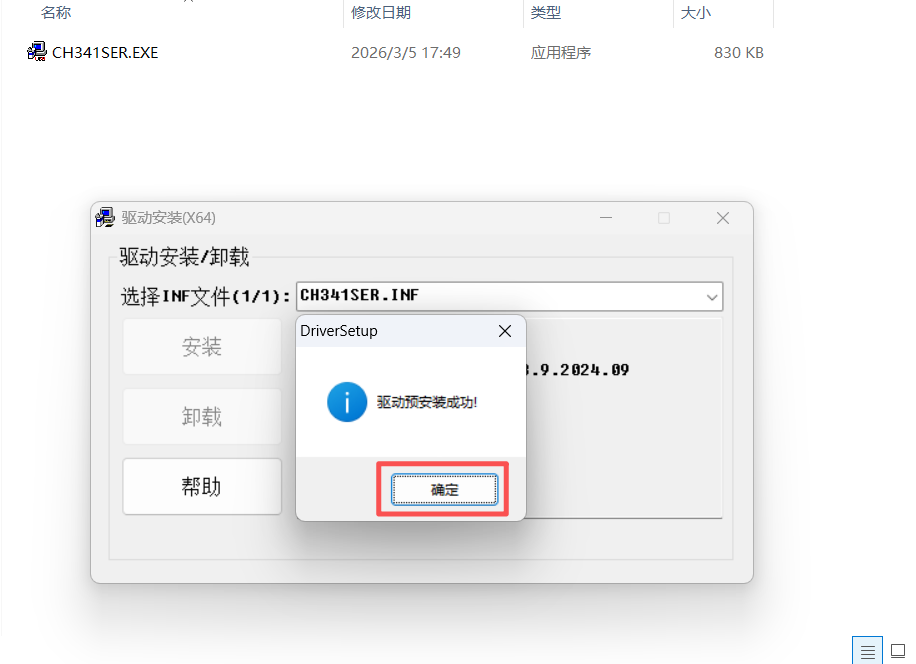
2.鼠标双击.EXE应用程序并点击安装按钮。
3.安装成功后点击确认。
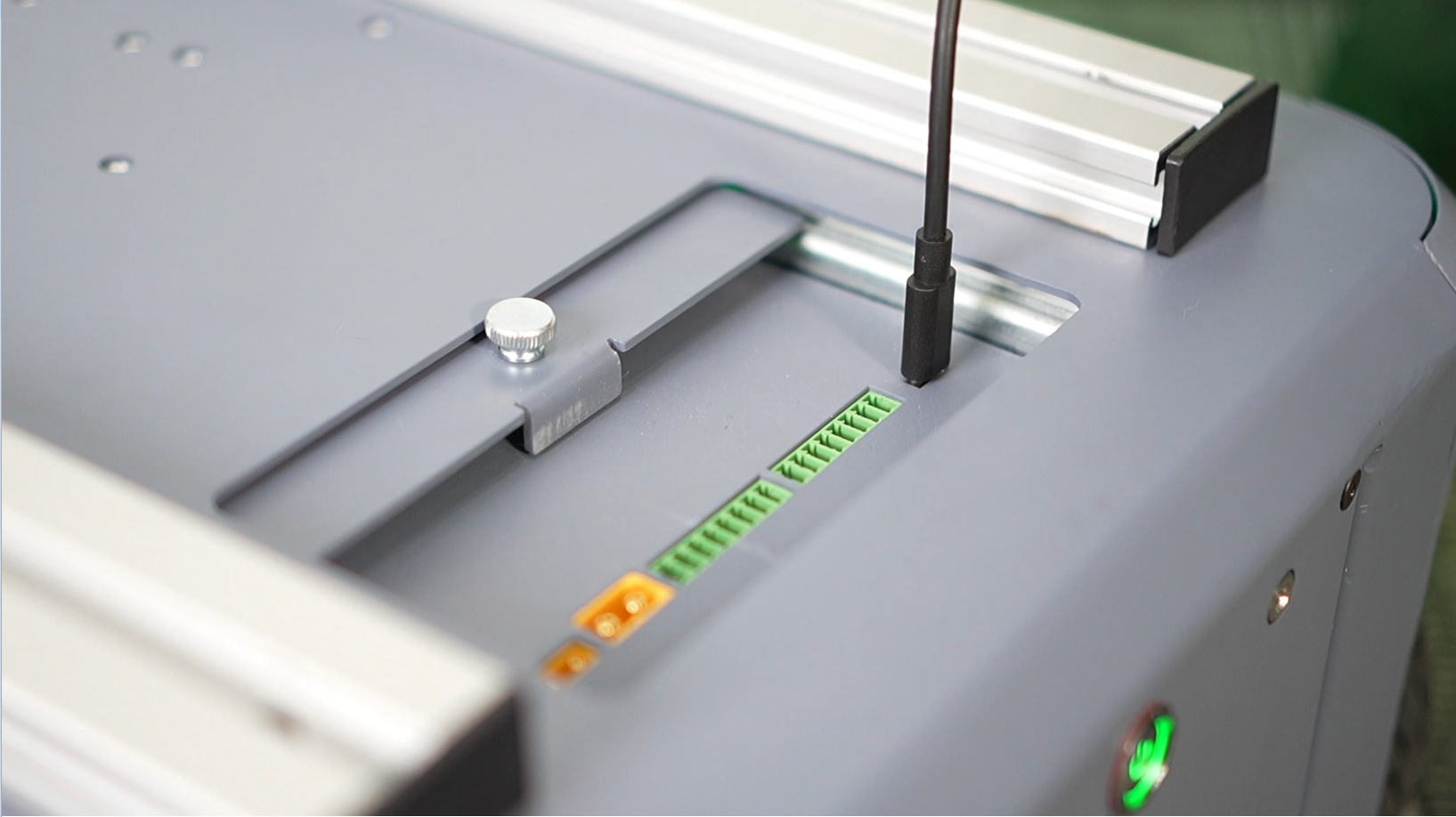
4.将myAGV Pro放置在水平平面上,将myAGV Pro的急停拨开后摁下电源启动键,启动myAGV Pro
5.使用TYPE-C线将myAGV Pro与Windows连接起来
6.打开PC的设备管理器,找到myAGV Pro的USB设备

7.需要在您的电脑上安装python环境,并安装pymycobot库, 安装方法请参考python安装及pymycobot, 在配置好环境之后您可以执行一下步骤:
在Windows任意目录下新建example.py文件,并输入以下代码
import time
from pymycobot import MyAGVPro
def main():
agv = MyAGVPro("COM28", debug=True)
if agv.is_power_on() != 1:
agv.power_on()
agv.move_forward(0.1)
time.sleep(2)
agv.stop()
agv.move_backward(0.1)
time.sleep(2)
agv.stop()
agv.turn_left(0.1)
time.sleep(2)
agv.stop()
time.sleep(1)
agv.turn_right(0.2)
time.sleep(2)
agv.stop()
if __name__ == '__main__':
main()
8.在命令行中执行python example.py,即可看到myAGV Pro开始移动
4.1.3 Linux快速体验
需要在您的Linux电脑上安装CH340串口驱动,安装方法请参考如下:
1.下载CH341SER_LINUX.ZIP到根目录下。或者执行下面终端指令:
wget https://download.elephantrobotics.com/software/drivers/CH341SER_LINUX.ZIP
2.执行下面终端指令安装驱动:
cd CH341SER_LINUX/driver/
make
sudo make load
sudo make install
3.重新插拔TYPE-C线,可以在终端输入下面指令搜索设备名,
ls -l /dev/ttyCH341USB*
如果串口驱动正常安装,则搜索多出/dev/ttyCH341USB0设备
/dev/ttyCH341USB0
4.需要在您的Linux设备上安装python环境,并安装pymycobot库
pip install pymycobot
5.连接设备
将myAGV Pro放置在水平平面上,将myAGV Pro的急停拨开后摁下电源启动键,启动myAGV Pro
使用TYPE-C线将myAGV Pro与Linux设备连接起来
6.在根目录下新建example.py文件,并输入以下代码
import time
from pymycobot import MyAGVPro
def main():
agv = MyAGVPro("/dev/ttyCH341USB0", debug=True)
if agv.is_power_on() != 1:
agv.power_on()
agv.move_forward(0.1)
time.sleep(2)
agv.stop()
agv.move_backward(0.1)
time.sleep(2)
agv.stop()
agv.turn_left(0.1)
time.sleep(2)
agv.stop()
time.sleep(1)
agv.turn_right(0.2)
time.sleep(2)
agv.stop()
if __name__ == '__main__':
main()
7.在命令行中执行python example.py,即可看到myAGV Pro开始移动