Control multiple joints
Preparation before you begin
Make sure the robotic arm is connected to the computer
Make sure the machine is normal
Make sure the machine is power on
Learning content of this chapter
How to use myBlockly to control multiple joint movements of a robotic arm
API introduction
Method 1: Control by joint angle
Method module:
Set angles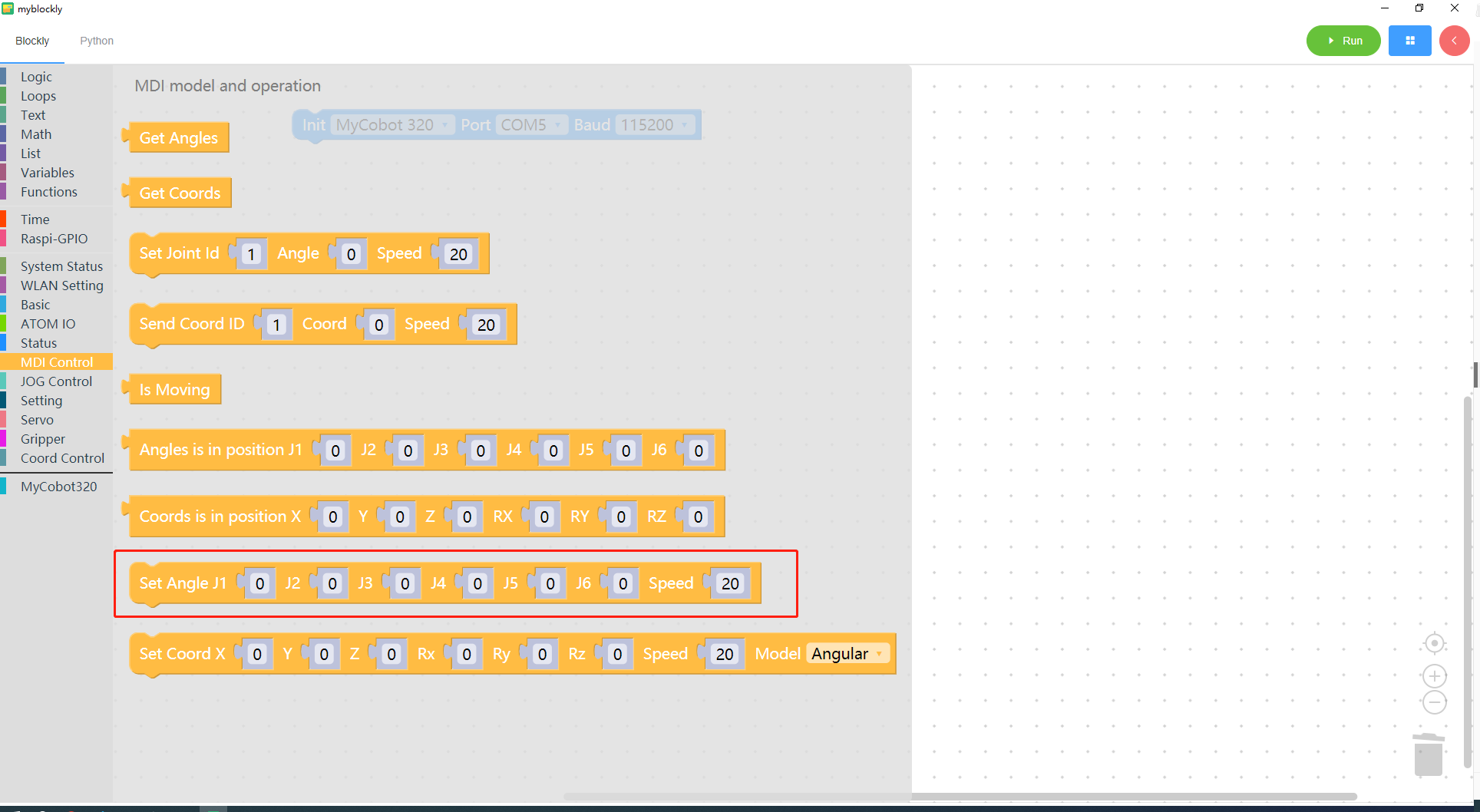

Parameter introduction:
This module has two parameters that can be adjusted:
Joint angle parameters
Speed parameters
Purpose: To control the movement of multiple joints of the robotic arm
Method 2: Control by coordinates
Method module:
Set Coord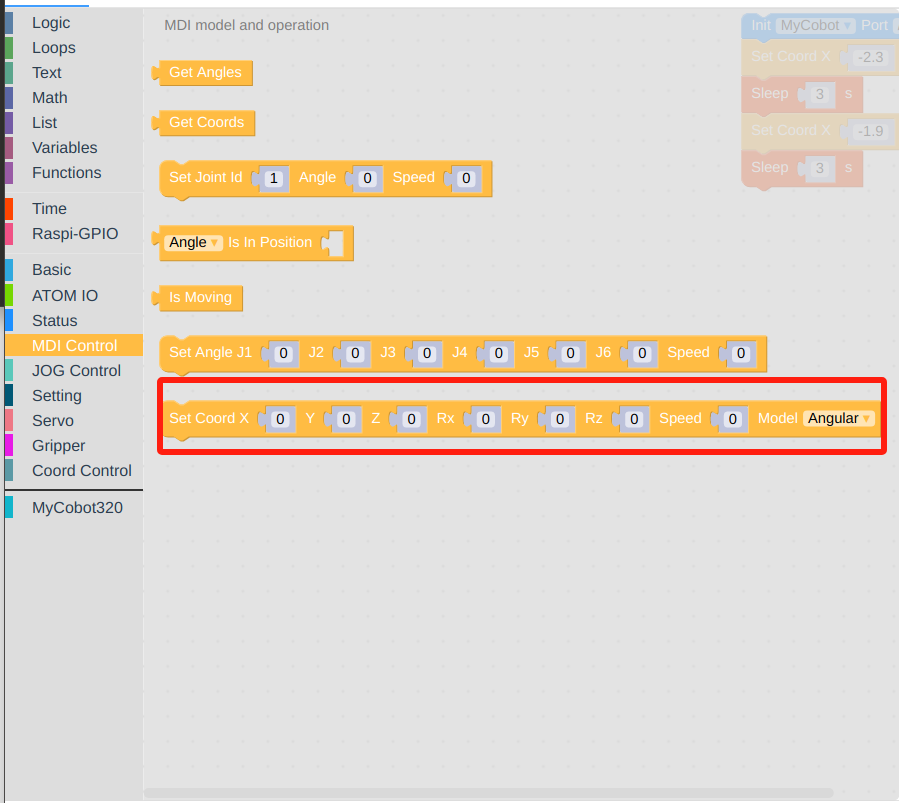

Parameter introduction:
This module has two parameters that can be adjusted:
coord parameters
Speed parameters
Route planning approach
Purpose: Controls the head to arrive at the specified coordinates in a certain attitude.
Simple demonstration
Method 1: Control by joint angle
The graphics code is as follows:
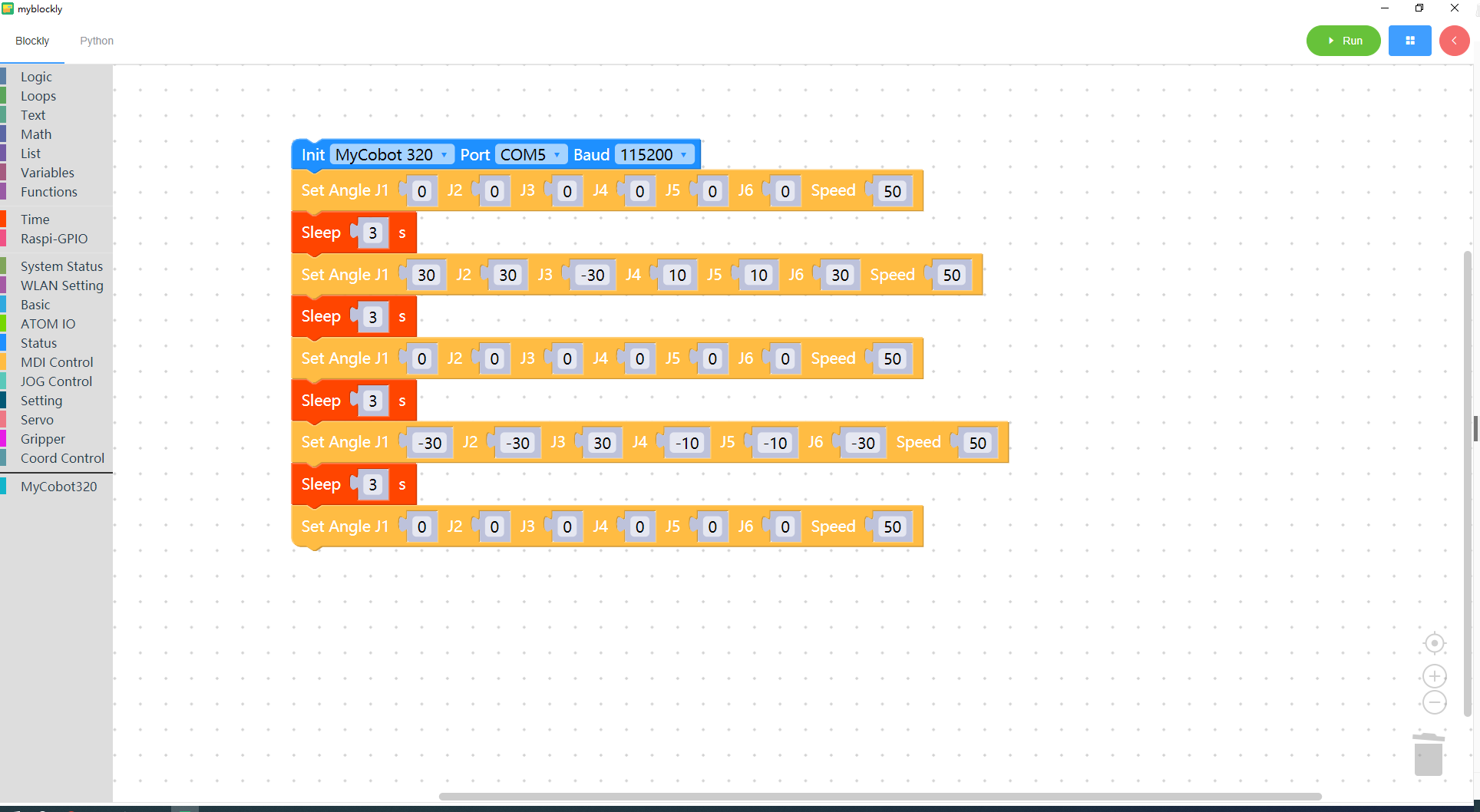
Implementation content:
Control all joints of the robotic arm to return to the origin. After three seconds,
At the same time, control the 1 joint, 2 joint, 3 joint, 4 joint, 5 joint, and 6 joint of the robotic arm to move at a speed of 50 to the positions of 30 degrees, 30 degrees, -30 degrees, 10 degrees, 10 degrees, and 30 degrees respectively. After three seconds,
Return all joints of the robotic arm to the origin at a speed of 50. After three seconds,
Simultaneously control the 1 joint, 2 joint, 3 joint, 4 joint, 5 joint, and 6 joint of the robotic arm to run at a speed of 50 to -30 degrees, -30 degrees, 30 degrees, -10 degrees, -10 degrees, and -30 degrees respectively. position, after three seconds,
Control all joints of the robotic arm to return to the origin
Method 2: Control by coordinates
The graphics code is as follows:
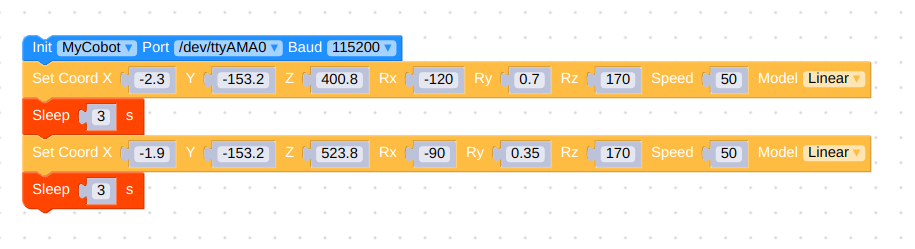
Note that the parameter at port should be changed to COM8 for the M5 version of the machine.
Intelligent planning of the route, allowing the head to reach the coordinates of [-2.3, -153.2, 400.8] in a linear manner, and maintain the posture of [-120.0, 0.7, 170], with a speed of 50mm/s
Set the waiting time to 3 seconds
Intelligent planning of the route, allowing the head to reach the coordinates of [-1.9, -153.2, 523.8] in a linear manner, and maintain the posture of [-90, 0.35, 170], with a speed of 50mm/s
Set the waiting time to 3 seconds