320M5 handle remote control case
Function description: Use the game controller to control the robot to perform coordinate movement and suction pump switch
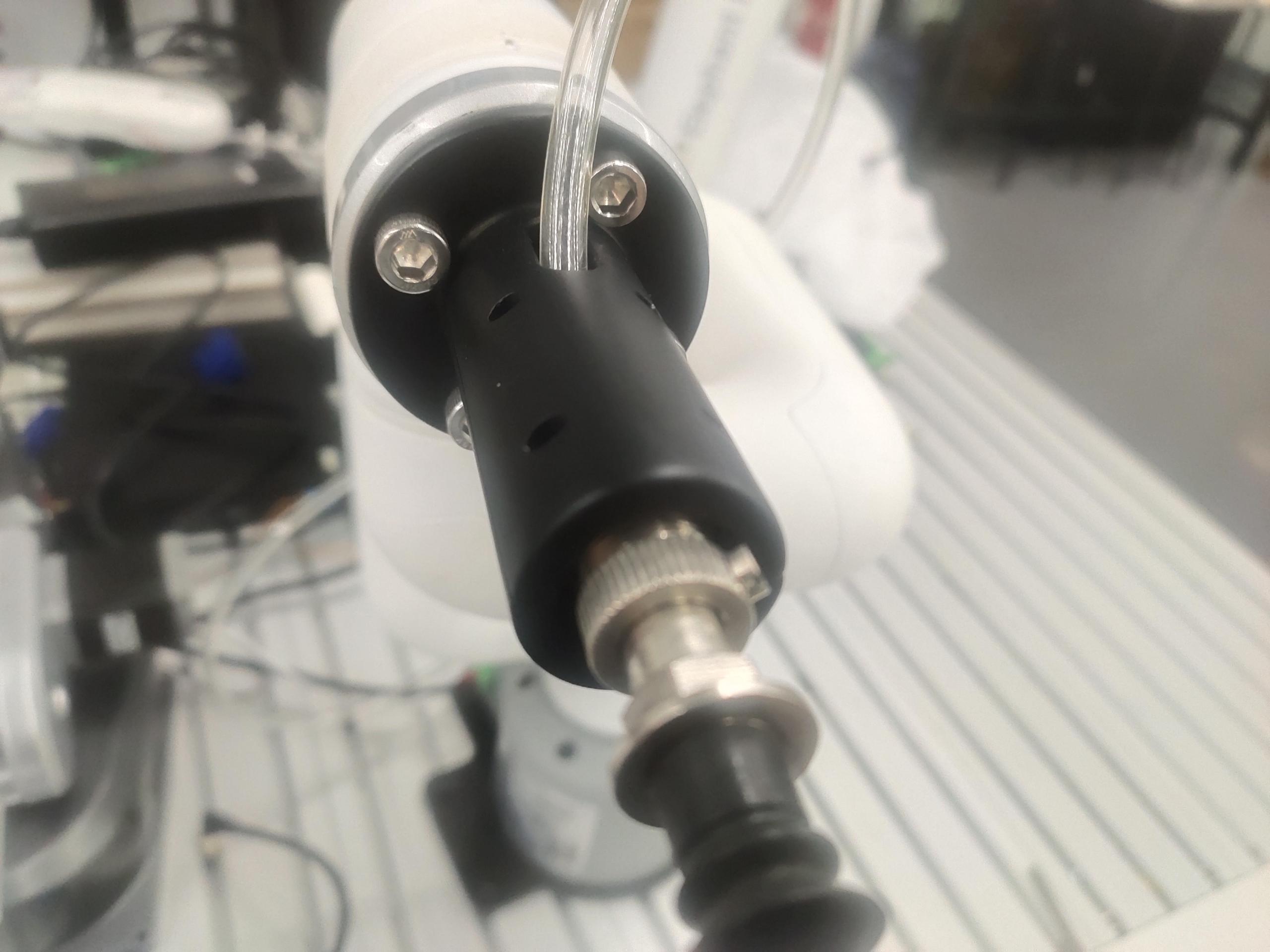
1 Suction pump installation
First install the suction pump to the end of the robot arm
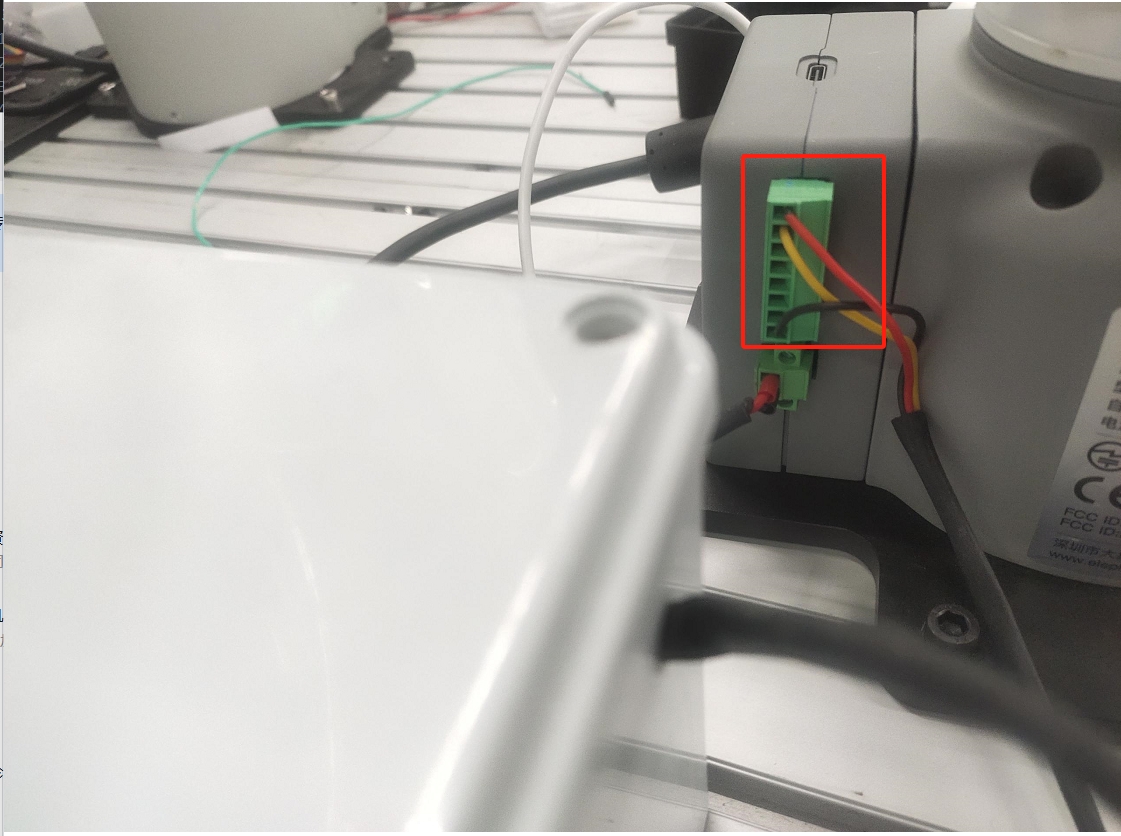
Then connect the suction pump control box line to the base IO of the robot arm
2 Suction pump test
from pymycobot import MyCobot,utils
import time
arm=MyCobot(utils.get_port_list()[0])
for i in range(1):
arm.set_basic_output(1,0)#Turn on the suction pump
time.sleep(2)
arm.set_basic_output(1,1)#Turn off the suction pump
time.sleep(2)
3 Controller function description
Note: The controller needs to be purchased separately, please consult the official customer service for details

Plug the receiver of the handle into the computer
| Button | Function |
|---|---|
| Press the direction key↑ | RY positive movement |
| Press the direction key↓ | RY negative movement |
| Press the direction key← | RX positive movement |
| Press the direction key→ | RX negative movement |
| Push the left joystick↑ | X positive movement |
| Push the left joystick↓ | X negative movement |
| Push the left joystick← | Y positive movement |
| Push the left joystick→ | Y negative movement |
| Push the right joystick↑ | Z positive movement |
| Push the right joystick↓ | Z negative movement |
| Push the right joystick← | RZ positive movement |
| Push the right joystick→ | RZ negative movement |
| Press the Y key | Turn on the suction pump |
| Press the A key | Turn off the suction pump |
Note: Some handle buttons are not used, so they will not have any effect on the robot arm
4 Installation of handle dependency library
Open the terminal and enter the following command to install the handle driver library
pip install pygame
5 Preparation
Adjust the robot arm to the posture shown in the figure below. There should be no debris around the robot arm to avoid collision

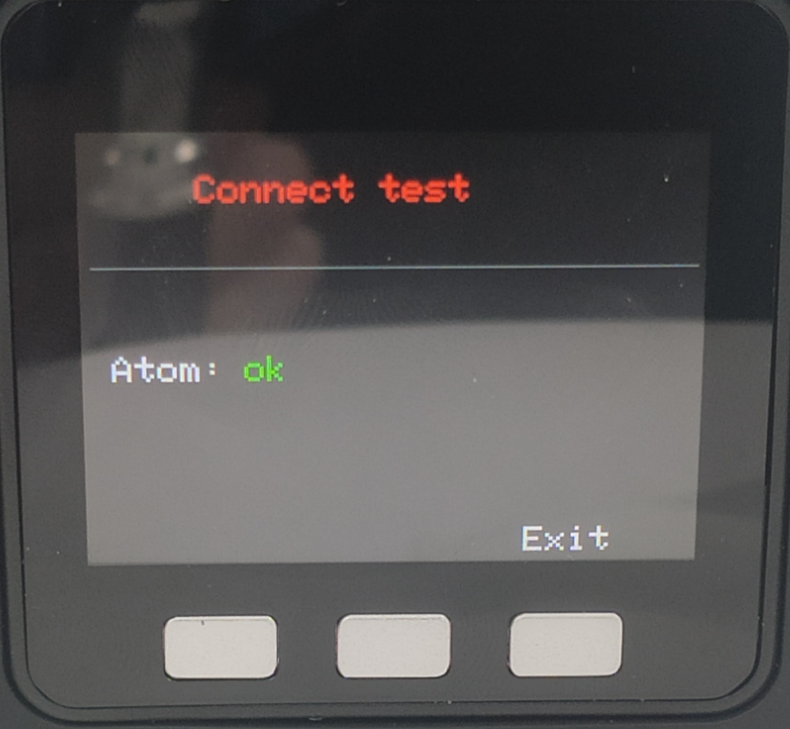
Note that the screen of the robot arm seat should display ok
Turn on the switch of the handle

Note whether the MODE LED of the handle is on

Note: Only MODE The LED lights up before you can control the robot arm. If the handle is not used for a long time, it will enter the standby state. You can press the START button of the handle to activate it.

6 Case program
import pygame
import sys
from pymycobot import MyCobot,utils
mc=MyCobot(utils.get_port_list()[0])
init_angles=[0, 0, -90, 0, 90, 0]
mc.sync_send_angles(init_angles,50)
pygame.init()
pygame.joystick.init()
button_pressed = False
hat_pressed=False
previous_state = [0,0,0,0,0,0]
def joy_handler():
global button_pressed
global hat_pressed
global previous_state
if event.type == pygame.JOYAXISMOTION:
axis = event.axis
value = round(event.value, 2)
if abs(value) > 0.1:
flag = True
previous_state[axis] = value
if axis==0 and value==-1.00:
mc.jog_coord(2,1,50)
elif axis==0 and value==1.00:
mc.jog_coord(2,0,50)
if axis==1 and value==1.00:
mc.jog_coord(1,0,50)
elif axis==1 and value==-1.00:
mc.jog_coord(1,1,50)
if axis==2 and value==1.00:
mc.jog_coord(6,1,50)
elif axis==2 and value==-1.00:
mc.jog_coord(6,0,50)
if axis==3 and value==1.00:
mc.jog_coord(3,0,50)
elif axis==3 and value==-1.00:
mc.jog_coord(3,1,50)
else:
if previous_state[axis] != 0:
mc.stop()
previous_state[axis] = 0
if event.type == pygame.JOYBUTTONDOWN:
if joystick.get_button(3)==1:
mc.set_basic_output(1,0)
if joystick.get_button(0)==1:
mc.set_basic_output(1,1)
if event.type == pygame.JOYHATMOTION:
hat_value = joystick.get_hat(0)
if hat_value ==(0,-1):
mc.jog_coord(5,1,50)
elif hat_value ==(0,1):
mc.jog_coord(5,0,50)
elif hat_value ==(-1,0):
mc.jog_coord(4,0,50)
elif hat_value ==(1,0):
mc.jog_coord(4,1,50)
if hat_value != (0, 0):
hat_pressed = True
else:
if hat_pressed:
mc.stop()
hat_pressed = False
if pygame.joystick.get_count() > 0:
joystick = pygame.joystick.Joystick(0)
joystick.init()
else:
print("No handle detected")
pygame.quit()
sys.exit()
running = True
while running:
for event in pygame.event.get():
if event.type == pygame.QUIT:
running = False
joy_handler()
pygame.quit()
7 Effect display