Robot suction pump to move wood blocks
1 Functional description
The robot will use the suction pump to move the wood blocks from point A to point B
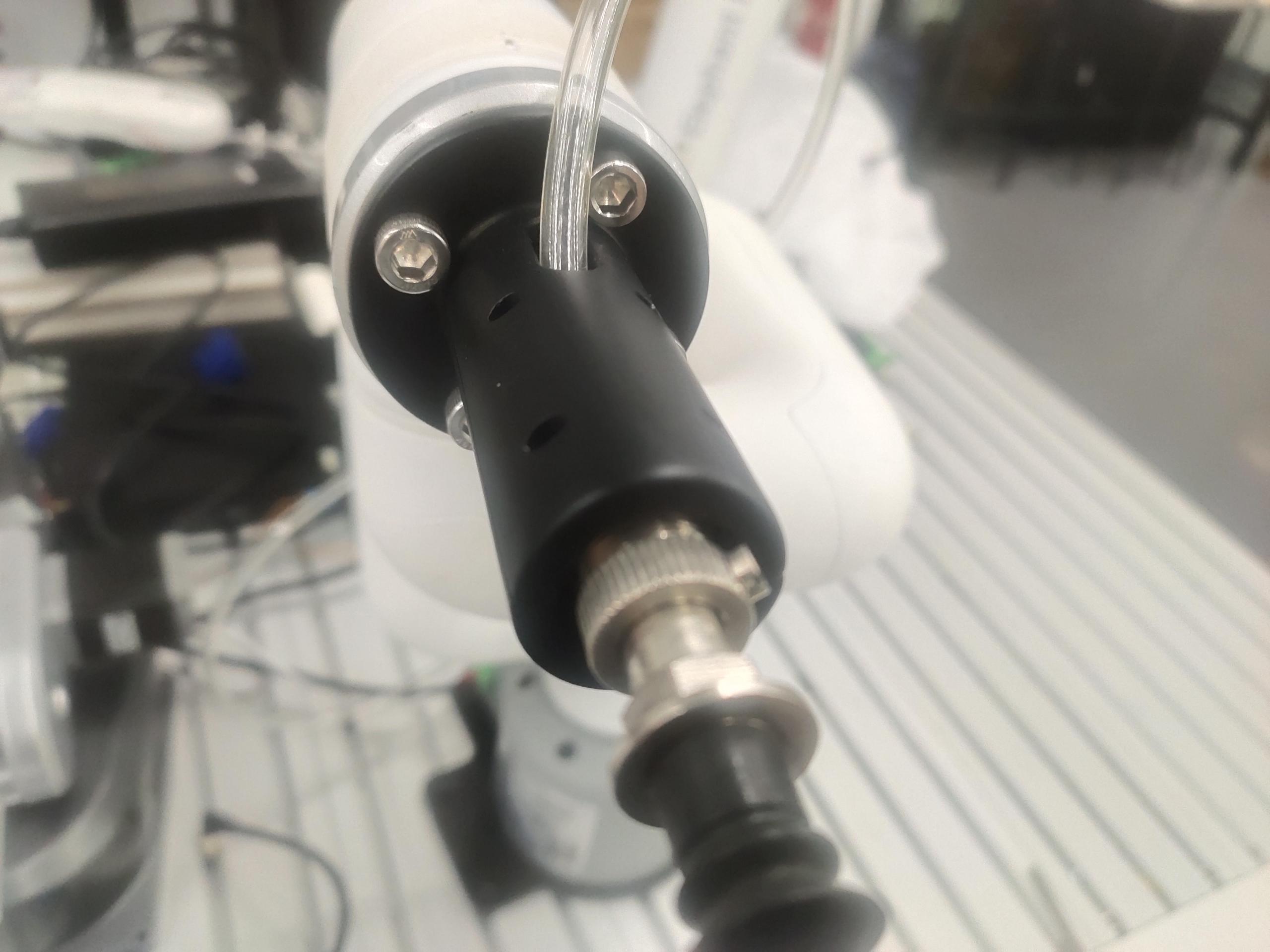
2 Hardware installation
First install the suction pump on the end of the robot arm
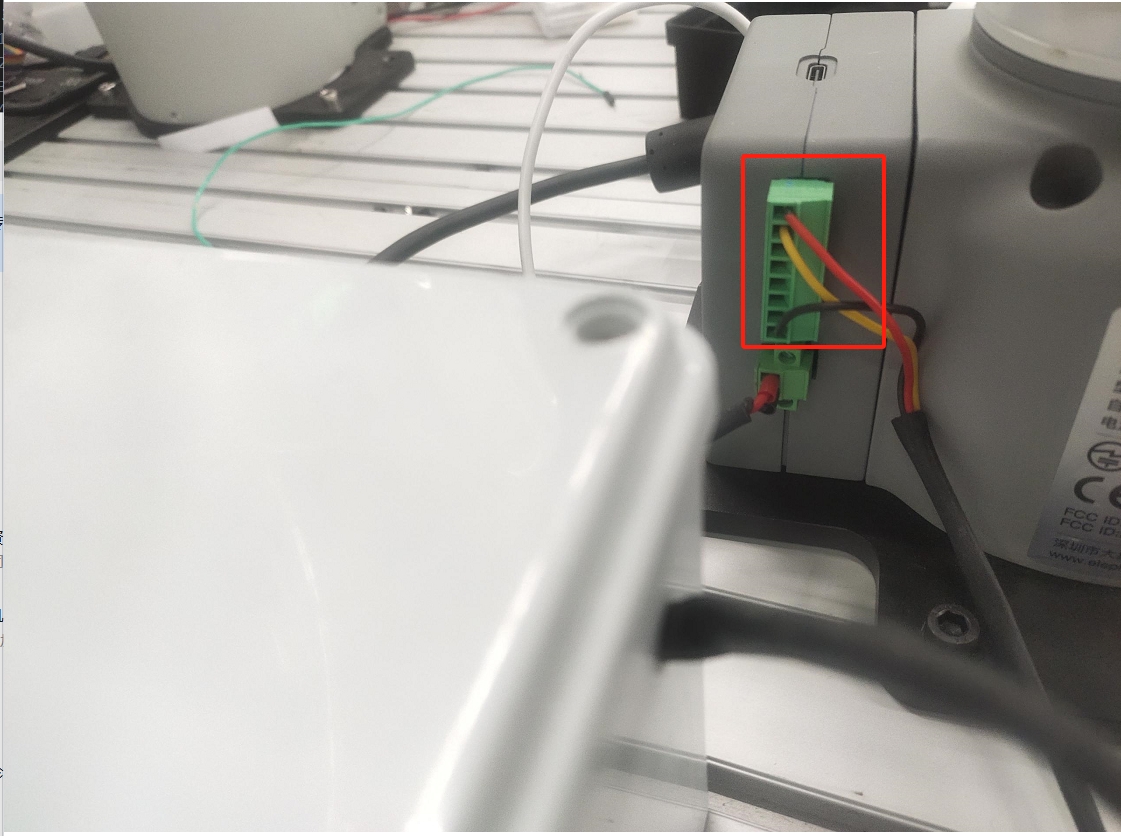
Then connect the wire of the suction pump control box to the base IO of the robot arm
3 Suction pump test
Run the following program, the suction pump will repeat the opening and closing action twice
from pymycobot import MyCobot,utils
import time
arm=MyCobot(utils.get_port_list()[0])
for i in range(2):
arm.set_basic_output(1,0)#OUT1 output open
time.sleep(2)
arm.set_basic_output(1,1)#OUT1 output closed
time.sleep(2)
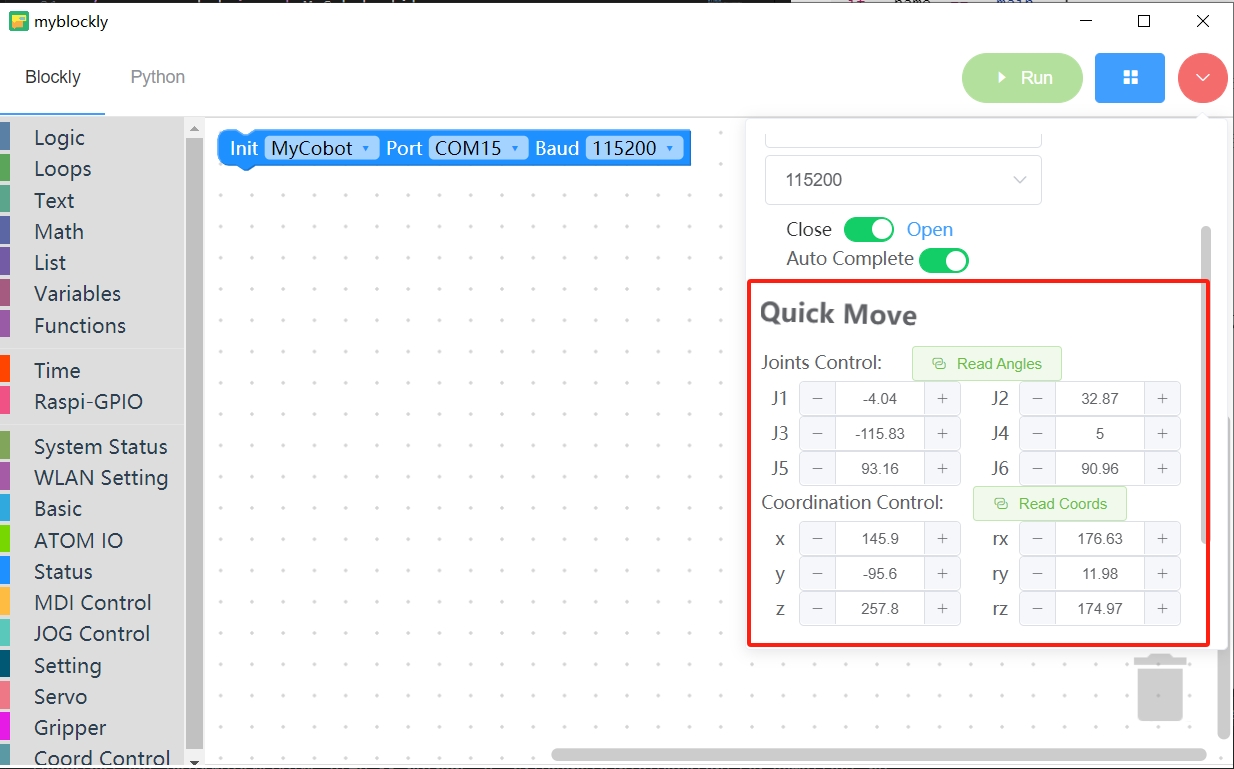
4 Software Usage
Use the fast movement function of myblockly to teach the grabbing point and placement point of the wooden block, and record the position information. After teaching, you need to disconnect the serial port connection, otherwise the serial port will be reported when running the python script.
5 Composite Applications
from pymycobot import MyCobot,utils
import time
init_angles=[-3.25, -2.46, -95.09, 9.22, 86.39, 93.33]#6 joint angles at the initial position
grab_point=[196.9, -197.1, 124.5, -178.8, 1.25, 173.32]#Coordinates of the grab point
place_point=[196.9, -97.1, 124.5, -178.8, 1.25, 173.32]#Coordinates of the placement point
arm=MyCobot(utils.get_port_list()[0])
if __name__=="__main__":
arm.set_basic_output(1,1)#Turn off the suction pump first
time.sleep(1)
arm.send_angles(init_angles,100)#Move to the initial position
time.sleep(2)
arm.send_coords([grab_point[0],grab_point[1],grab_point[2]+70,grab_point[3],grab_point[4],grab_point[5]],100,1)#Move to 70mm above the grab point
time.sleep(2)
arm.send_coords([grab_point[0],grab_point[1],grab_point[2],grab_point[3],grab_point[4],grab_point[5]],100,1)#Move to the grab point
time.sleep(2)
arm.set_basic_output(1,0) #Turn on the suction pump
time.sleep(1)
arm.send_coords([grab_point[0],grab_point[1],grab_point[2]+70,grab_point[3],grab_point[4],grab_point[5]],100,1)#Move to 70mm above the grab point
time.sleep(2)
arm.send_coords([place_point[0],place_point[1],place_point[2]+70,place_point[3],place_point[4],place_point[5]],100,1)#Move to 70mm above the placement point
time.sleep(2)
arm.send_coords([place_point[0],place_point[1],place_point[2],place_point[3],place_point[4],place_point[5]],100,1)#Move to the placement point
time.sleep(2)
arm.set_basic_output(1,1) #Turn off the suction pump
time.sleep(1)
arm.send_coords([place_point[0],place_point[1],place_point[2]+70,place_point[3],place_point[4],place_point[5]],100,1)#Move to 70mm above the placement point
time.sleep(2)
6 Effect display