2.5D二维码分拣套件

1 套件硬件介绍
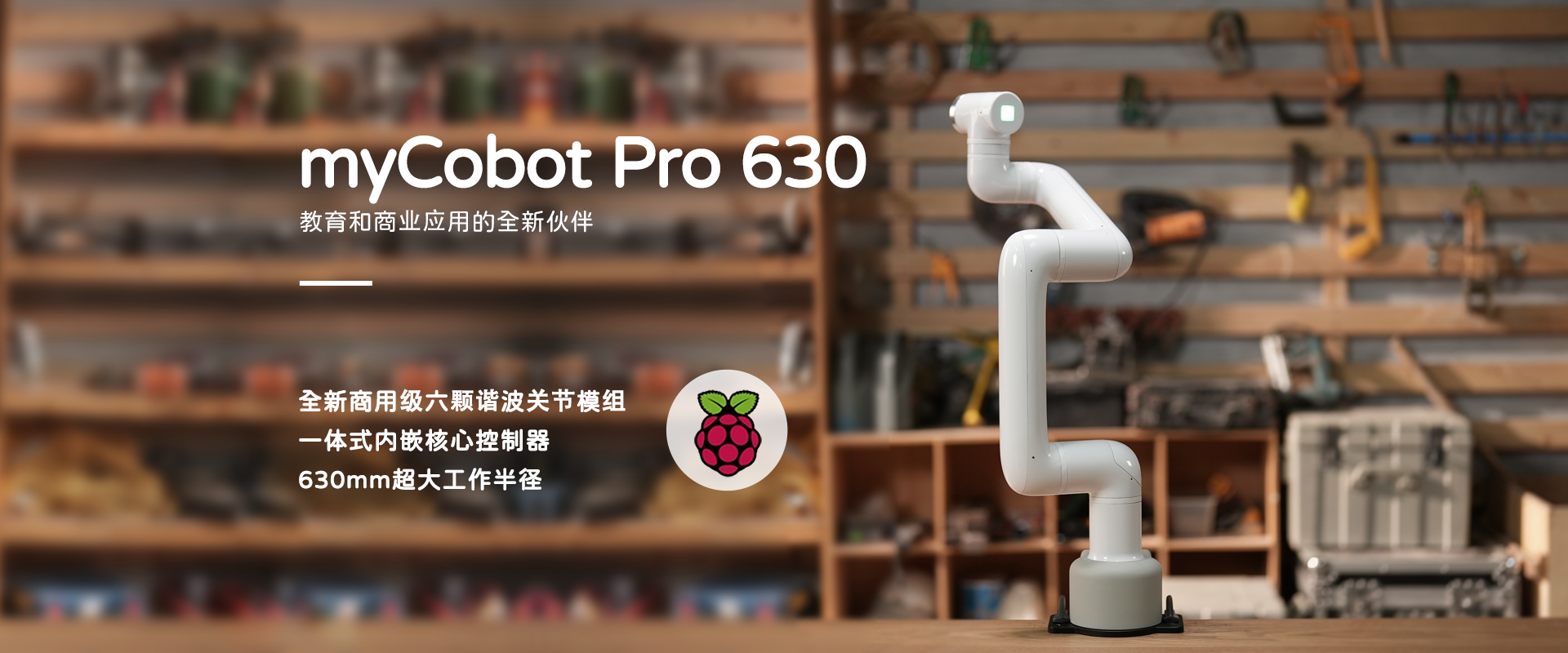
1.1 MyCobot Pro630机械臂
1.1 RealSense D435

2 realsense软件环境搭建
2.1 下载RealSense SDK 2.0
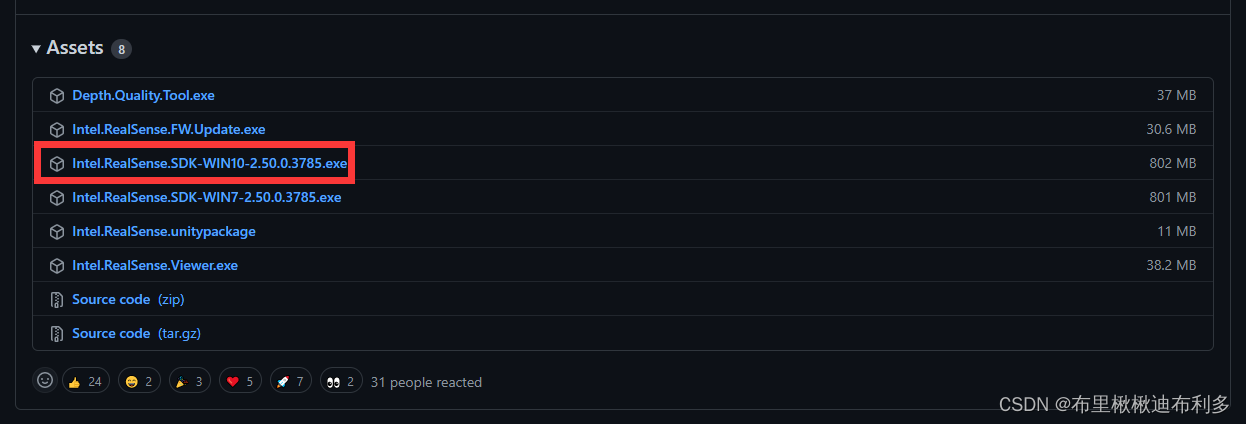 下载完成后文件夹内有如下图所示软件,直接安装即可。
下载完成后文件夹内有如下图所示软件,直接安装即可。
2.2 测试RealSense D435
打开RealSense Viewer。
将赠送的usb3.0线连接到电脑上,一定要是usb3.0的插口!!!!如果是3.0插口和线,那么在Viewer界面左侧就如下图所示。接下来只要将Stereo Module和RGB Camera的off设置成on即可。
 将off设置成on后,就会出现如下图所示界面。测试成功后,即可以关闭该软件
将off设置成on后,就会出现如下图所示界面。测试成功后,即可以关闭该软件

3 Pyhton 环境搭建
3.1 下载python
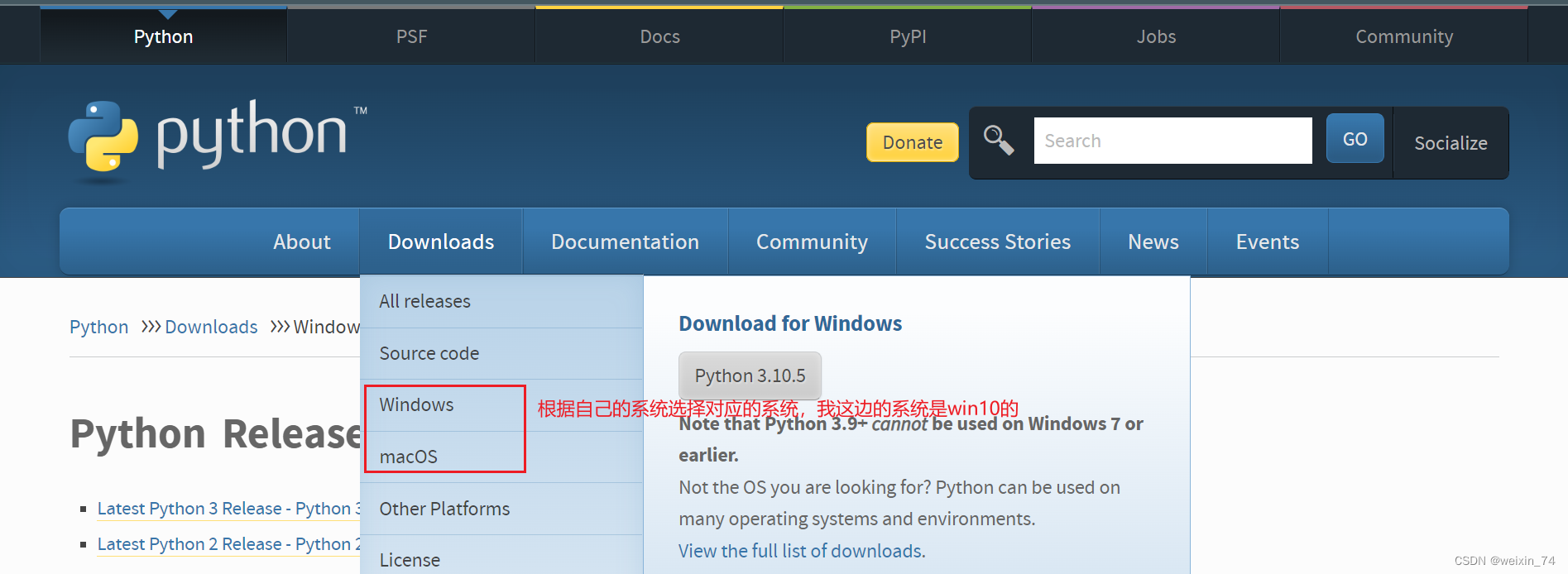
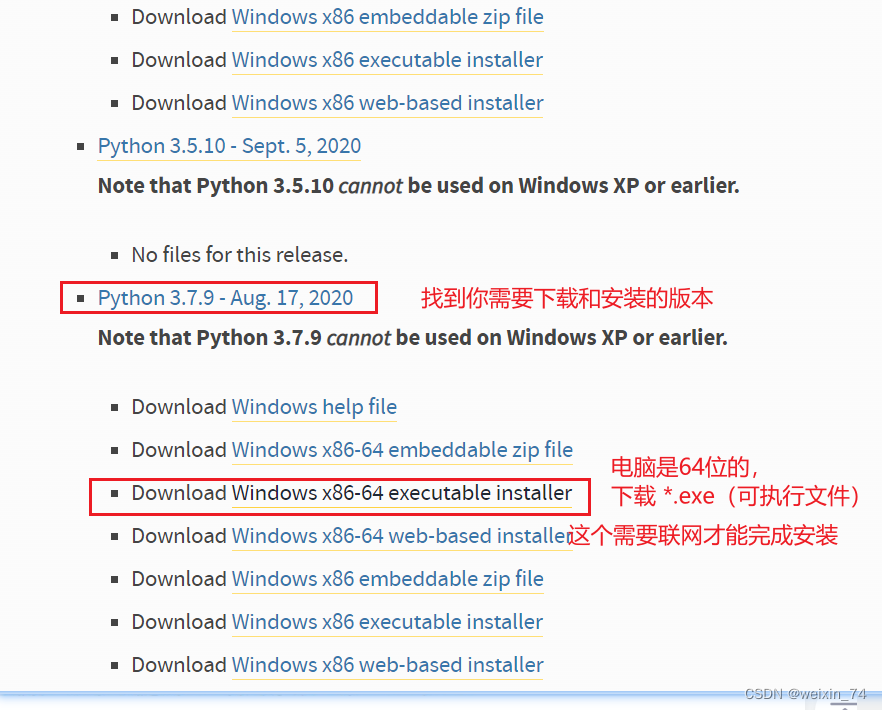
选择你要安装的版本,推荐安装3.7以上版本
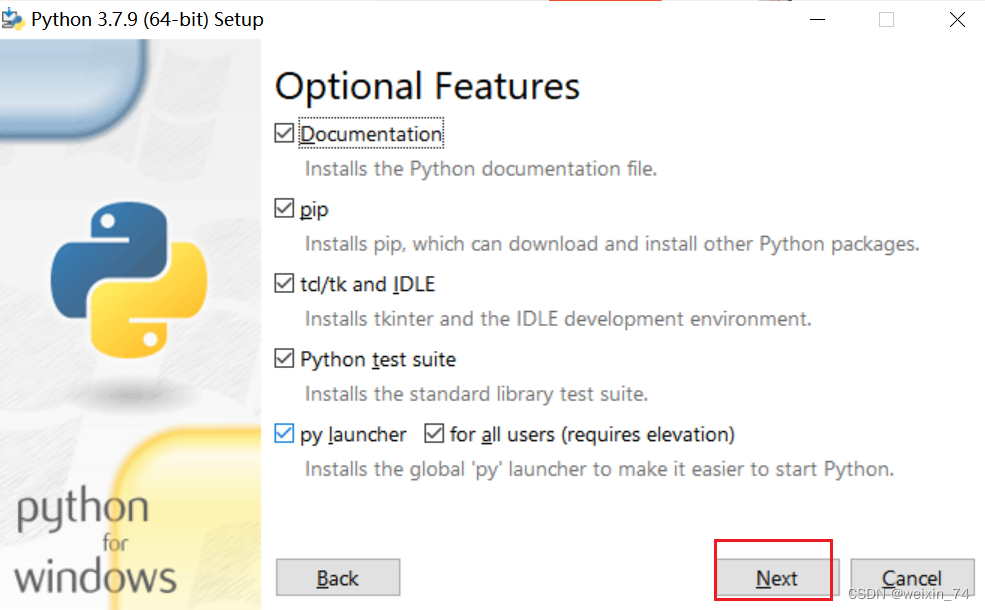
双击安装包后
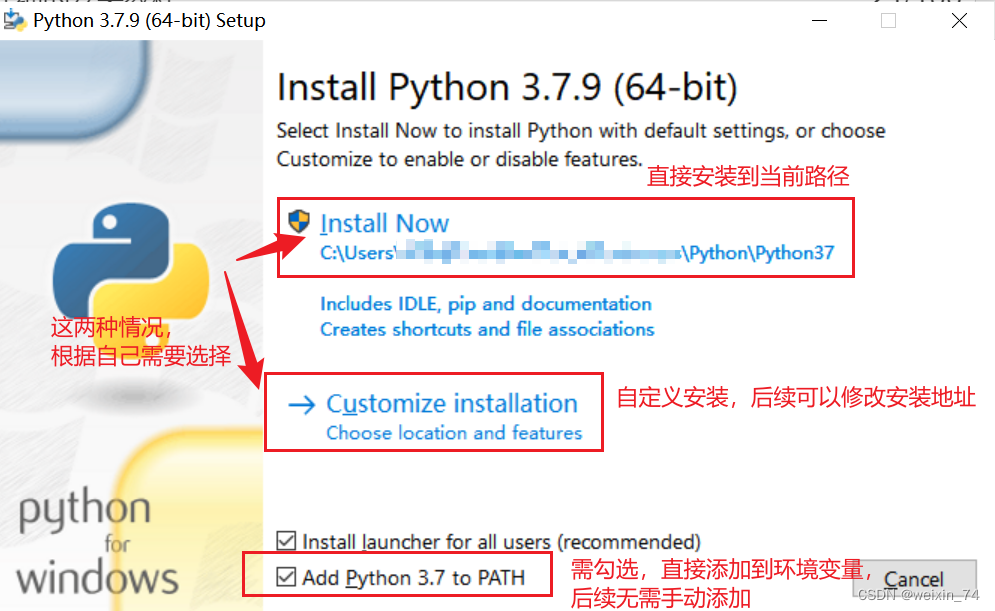
保持默认配置,直接点击Next
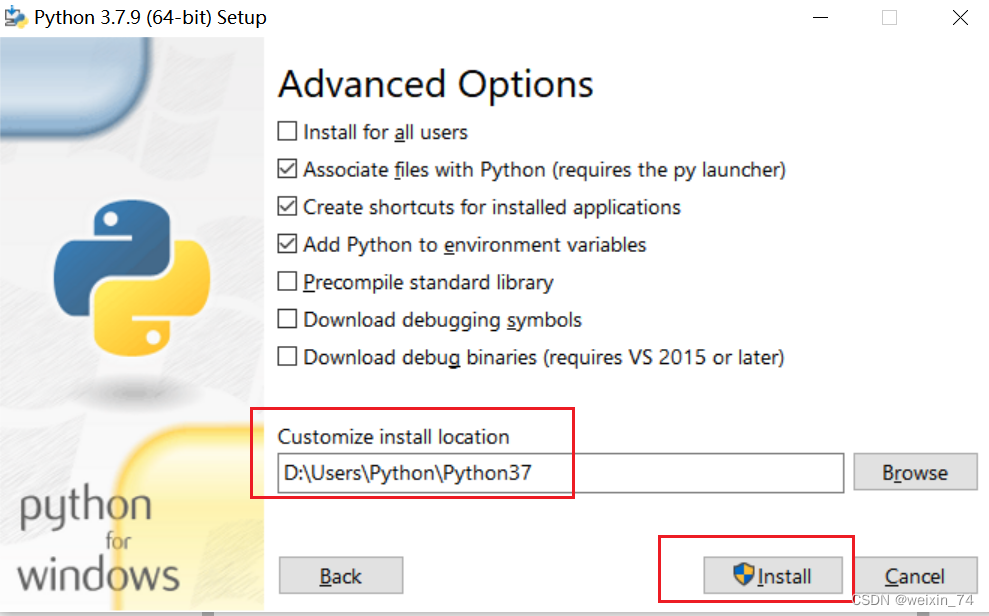
 若选择自定义软件安装位置后,点击Install
(建议安装的文件路径是全英路径,因为有些软件安装遇到中文会打不开)
若选择自定义软件安装位置后,点击Install
(建议安装的文件路径是全英路径,因为有些软件安装遇到中文会打不开)
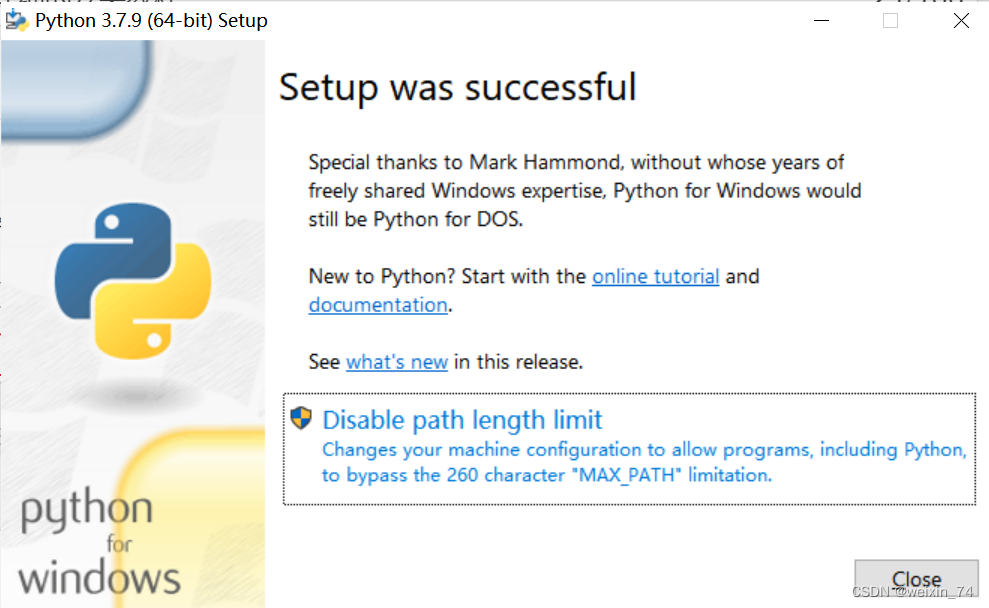
安装完成后,可以完毕当前页面,然后按键盘的 Windows键 + r键,并输入 cmd
 pymycobot安装
pymycobot安装
pip install pymycobot --upgrade --user

opencv安装
# 二者版本号需保持一致,这里安装4.5.5.62版本
pip install opencv-python==4.5.5.62
pip install opencv-contrib-python==4.5.5.62


3 手眼标定
第一步:当机械臂与相机安装好后,将二维码放在相机的正下方,运行HandToEye脚本进行手眼标定,观察脚本输出的XY值
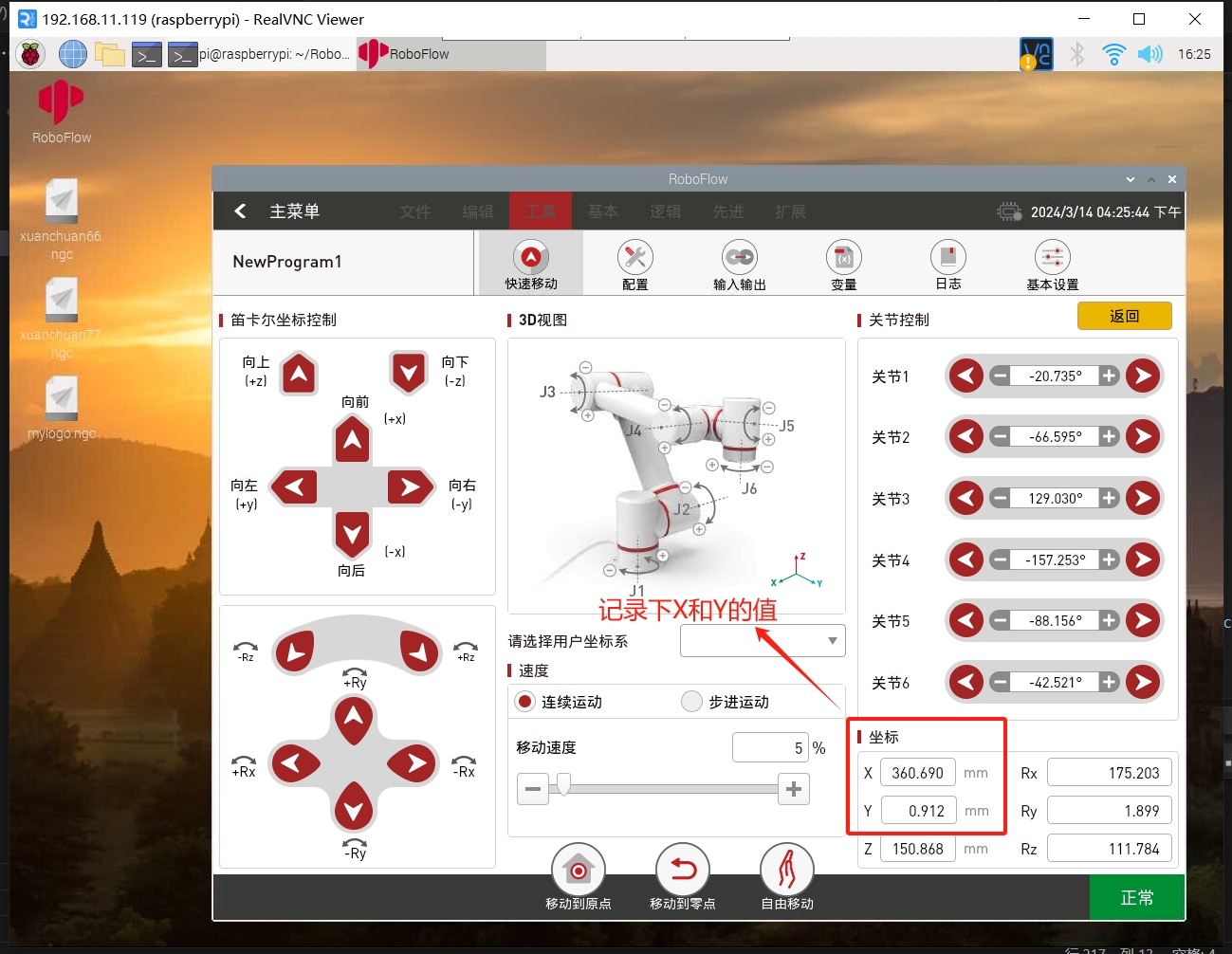
 第二步:利用roboflow的快速移动,将机械臂示教到二维码的正上方,记录下roboflow的XY的实际值
第二步:利用roboflow的快速移动,将机械臂示教到二维码的正上方,记录下roboflow的XY的实际值
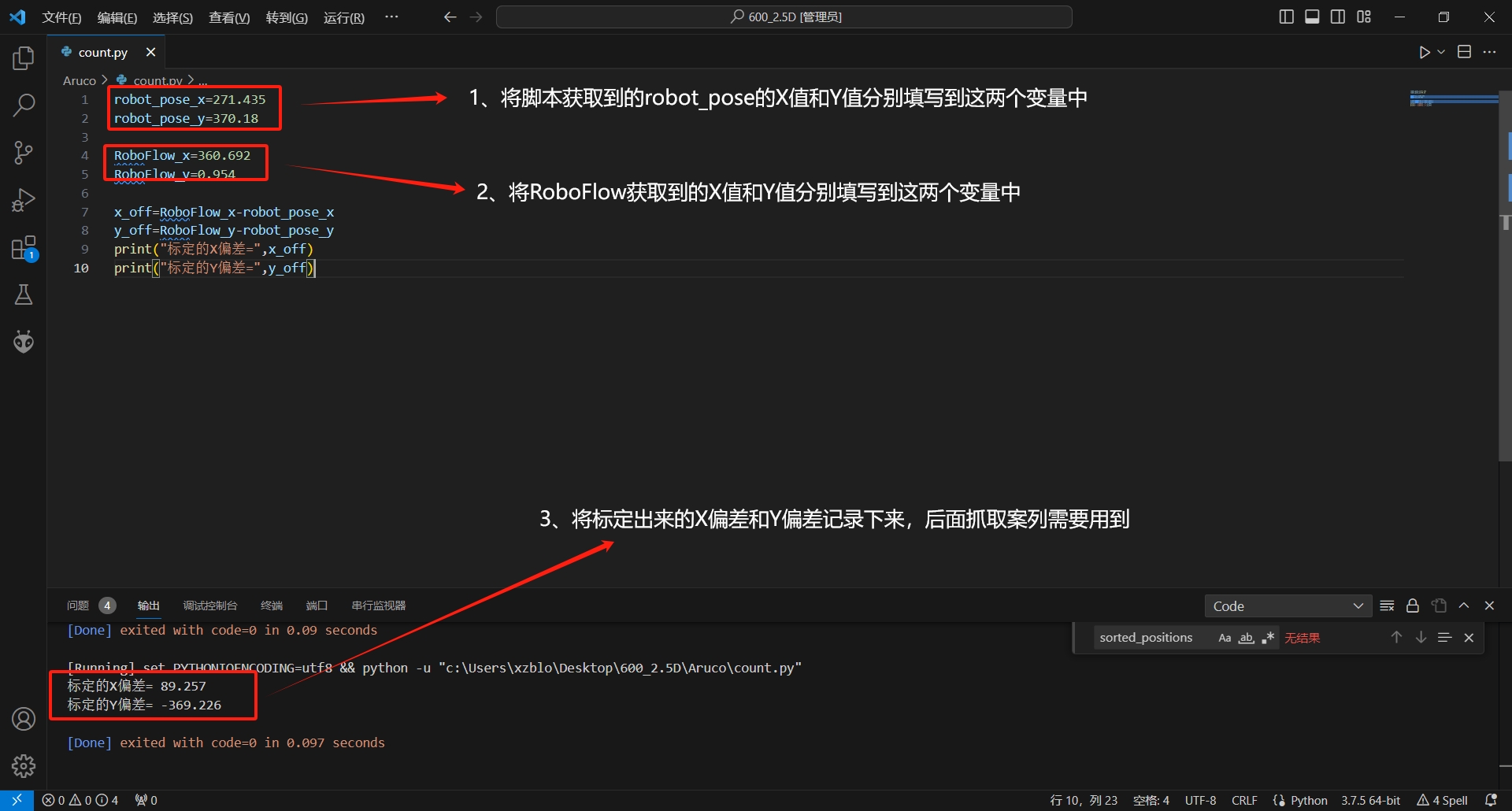
 第三步:代开count.py脚本,填写对应参数后运行脚本。用roboflow的XY的实际值减去,脚本的XY值,就是相机坐标系对与机械臂的基座标系的偏位置关系
第三步:代开count.py脚本,填写对应参数后运行脚本。用roboflow的XY的实际值减去,脚本的XY值,就是相机坐标系对与机械臂的基座标系的偏位置关系
4 案列复现
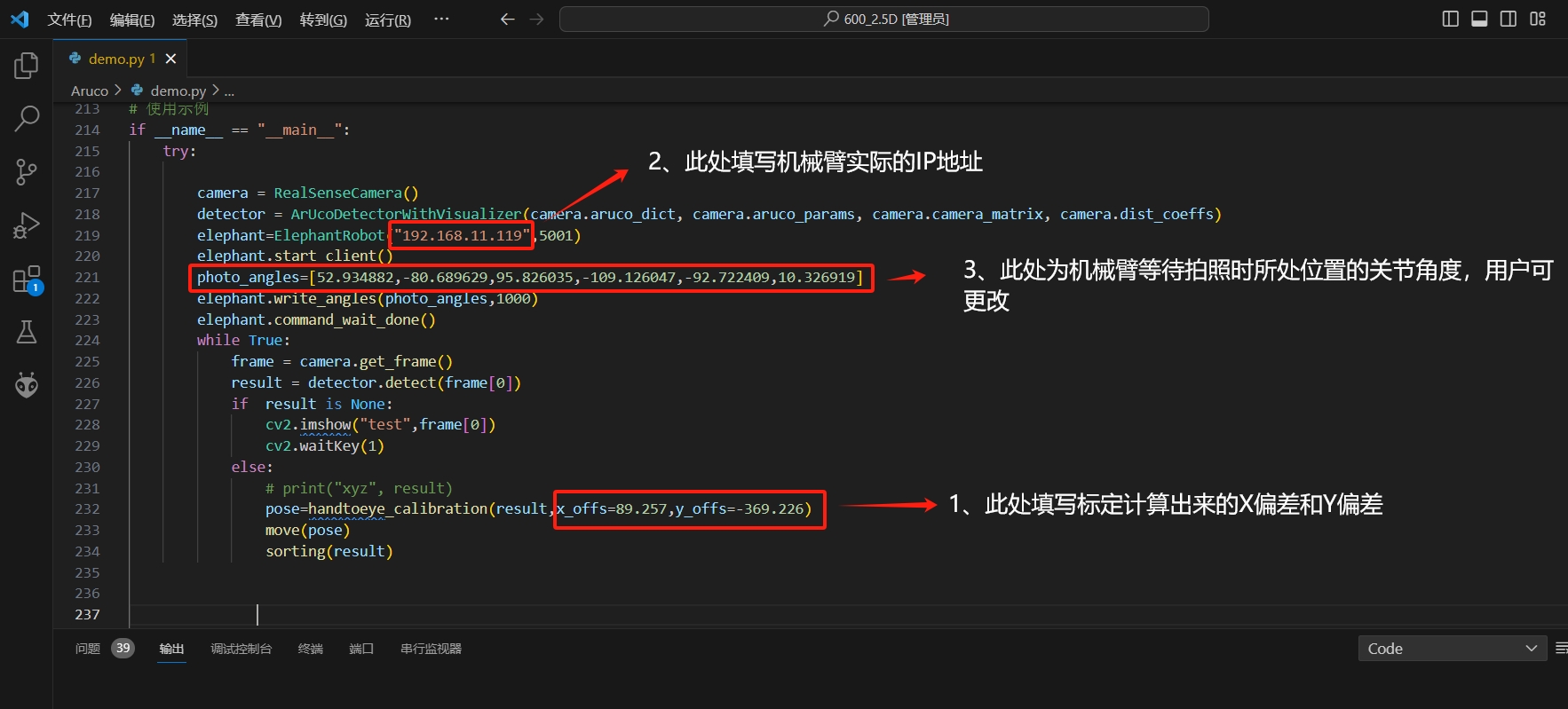
第一步:打开demo.py脚本用户可根据实际情况修改过渡点位,分拣区点位
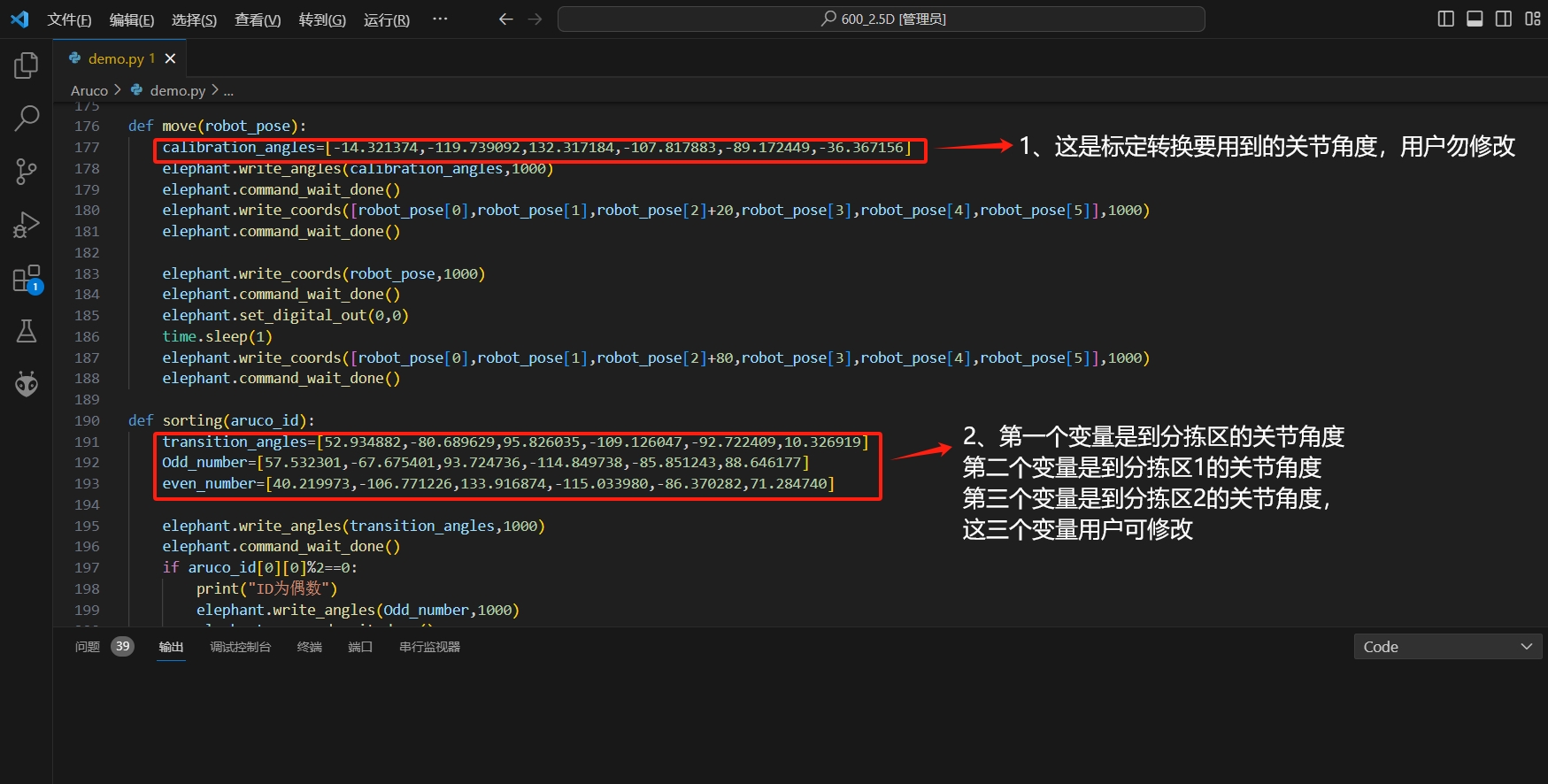
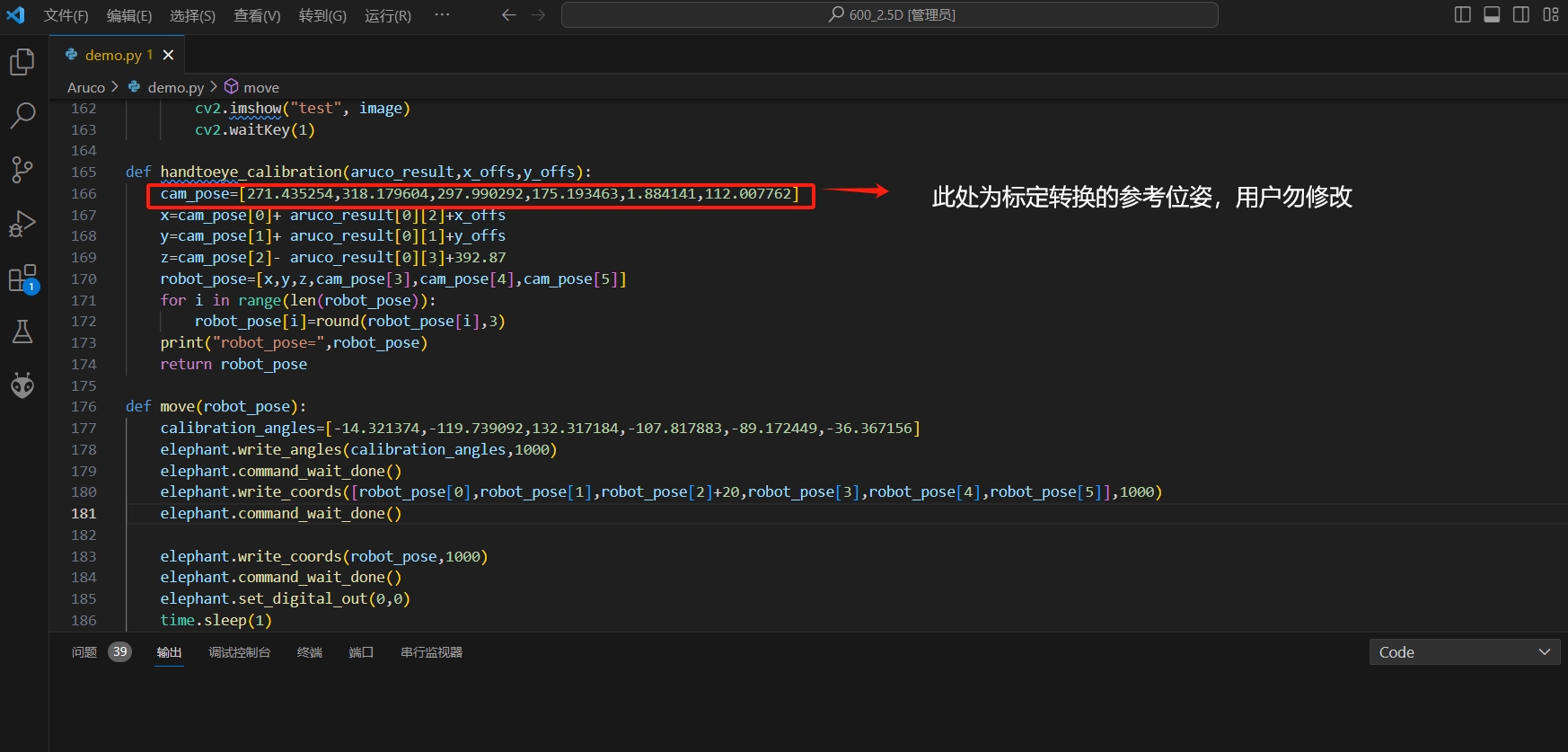 第二步:填写标定计算出来的X偏差和Y偏差,运行脚本即可
第二步:填写标定计算出来的X偏差和Y偏差,运行脚本即可