基于Python API开发
大象提供了Python API来远程控制机器人,我们使用TCP协议来在客户端和机器人之间进行通信,因此在使用我们的API之前,您需要按照文档操作以下内容。
1 环境搭建
1.1 安装Python
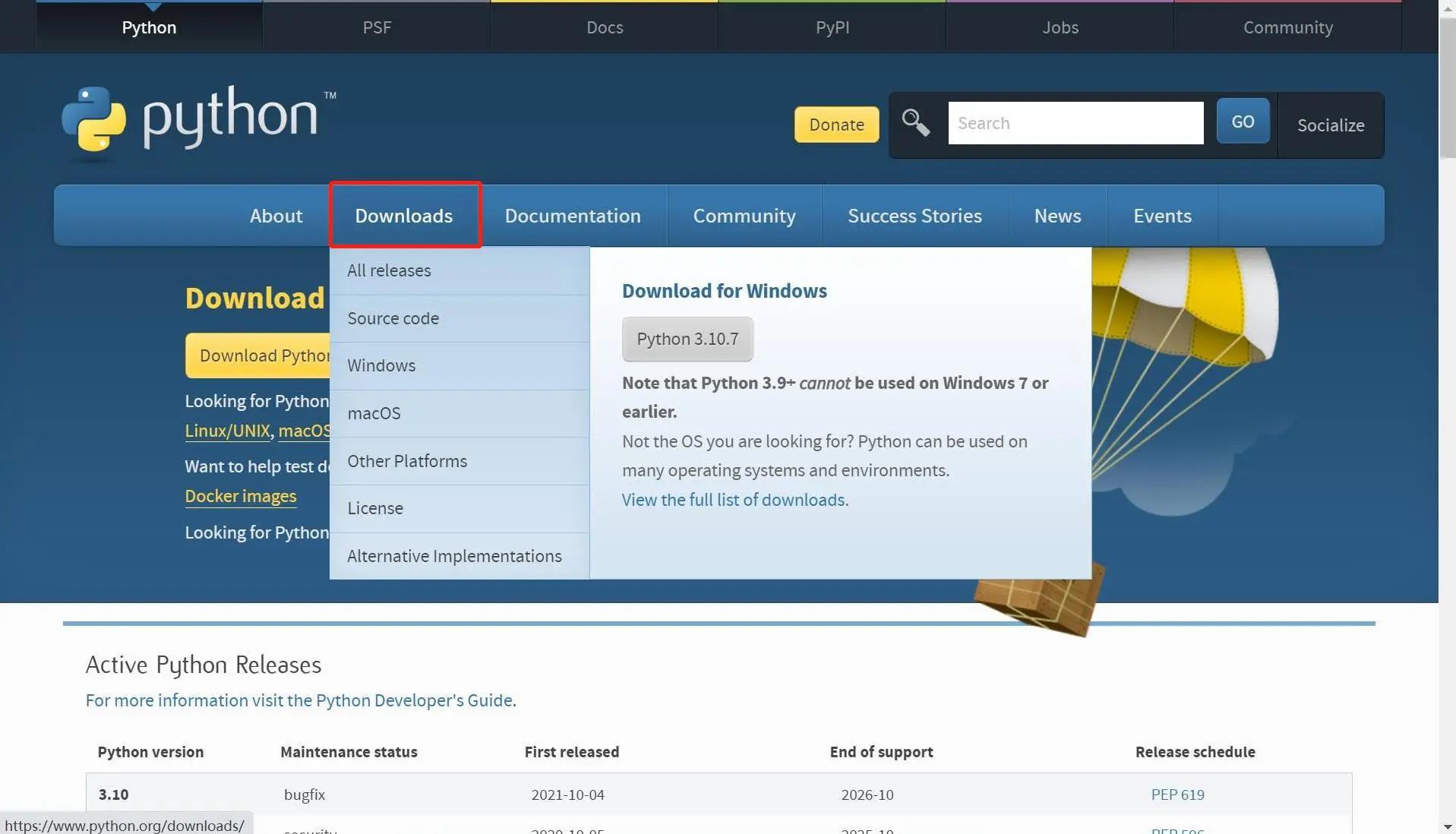
- Python官方下载地址: https://www.python.org/downloads/
- 建议安装3.7及以上版本
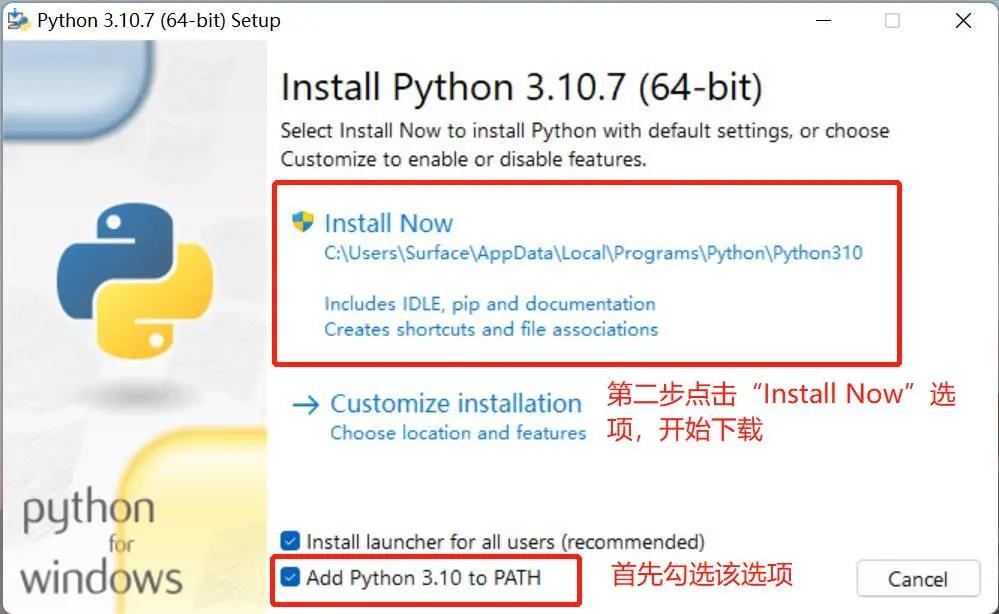
- 点击
Downloads选项,开始下载Python,点击Add Python 3.10 to PATH,点击Install Now,开始安装Python
- 出现“Setup was successful”提示,说明安装完成
1.2 pymycobot安装
- pymycobot安装。打开一个控制台终端(快捷键Win+R,输入cmd进入终端),输入以下命令后按键盘回车键进行安装:
pip install pymycobot --upgrade

2 开启TCP服务器功能
2.1登录RoboFlow操作系统
机器人上电开机后,使用VNC Viewer进入树莓派,登录RoboFlow操作系统
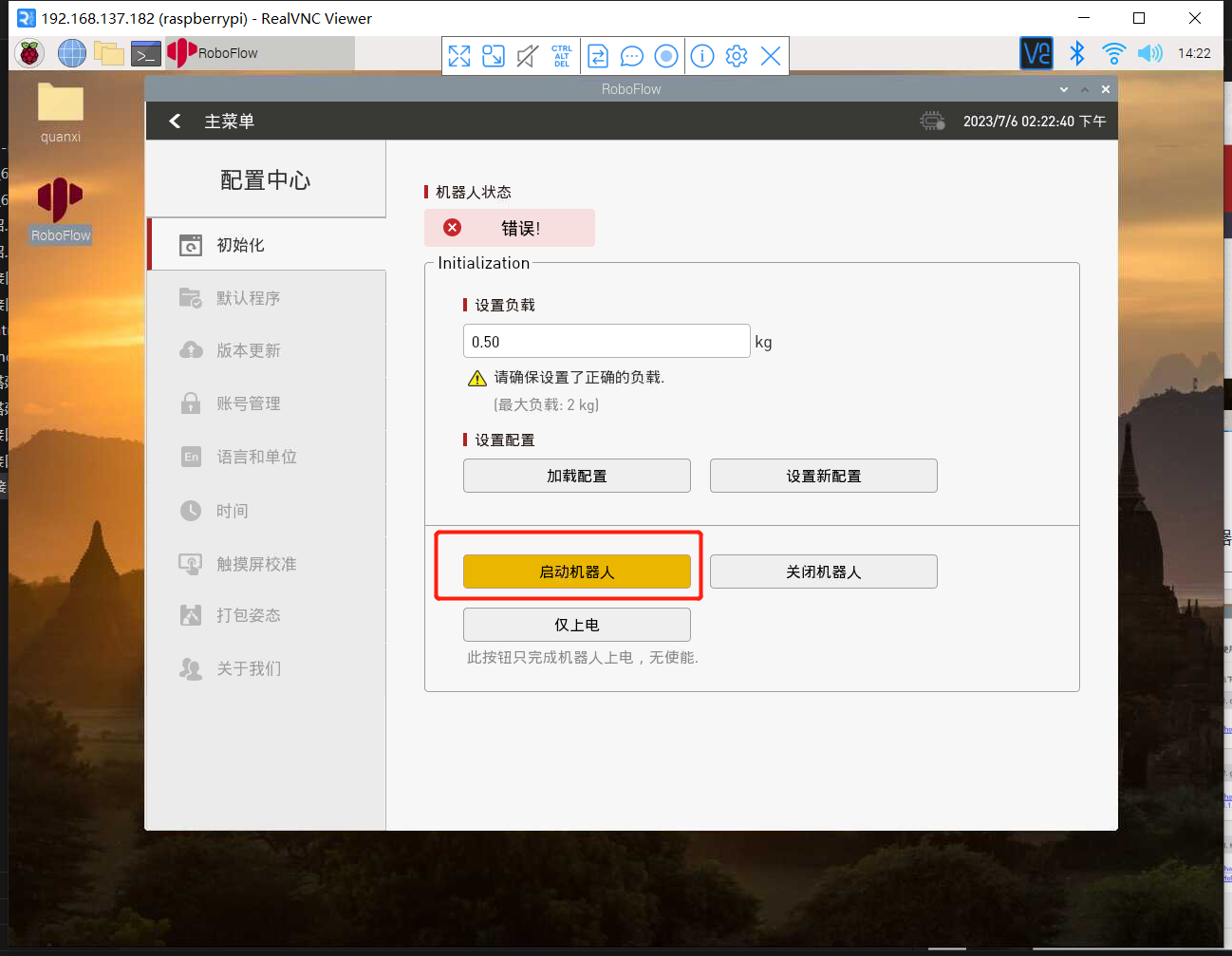
2.2启动机器人
进入配置中心,点击启动机器人按钮


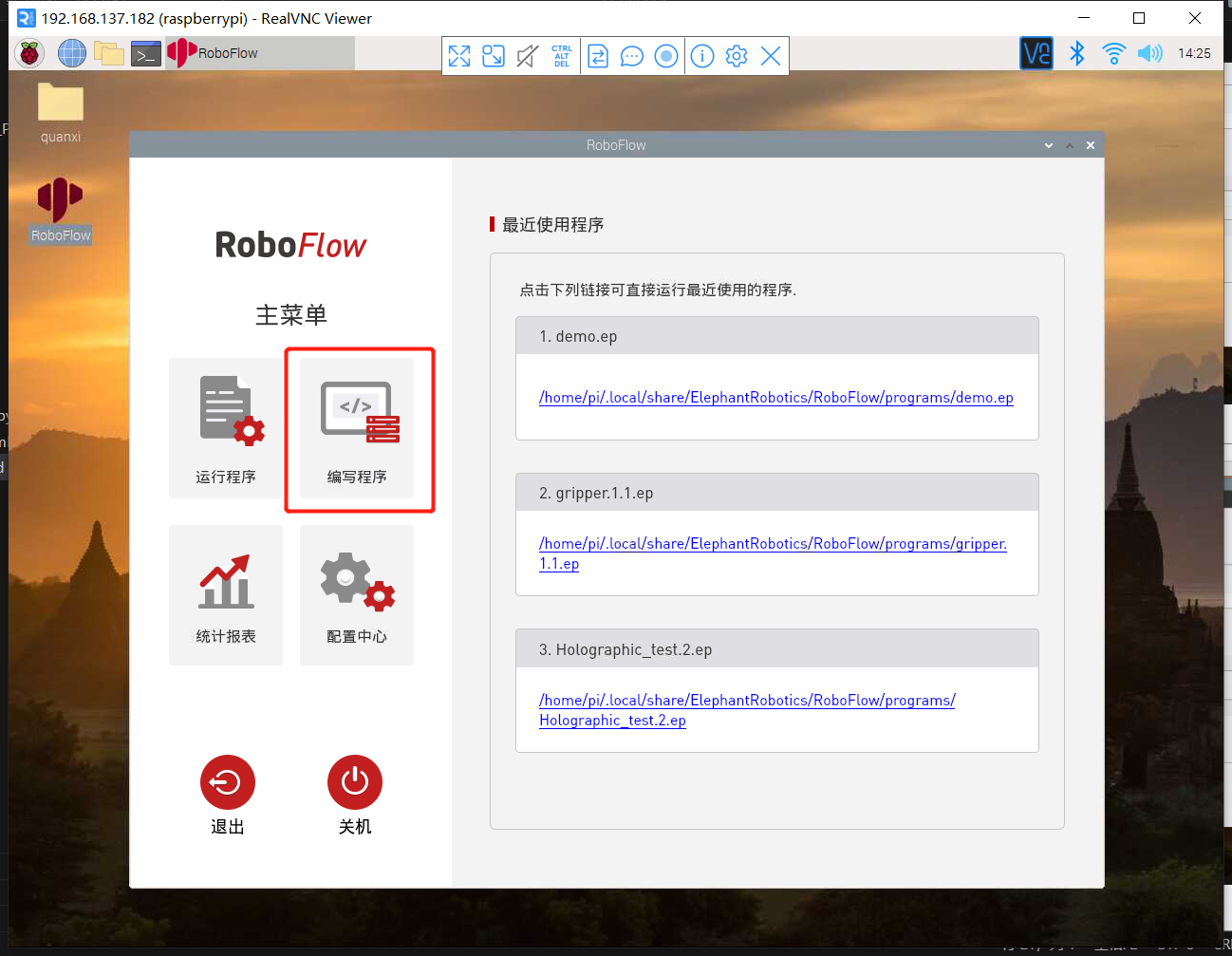
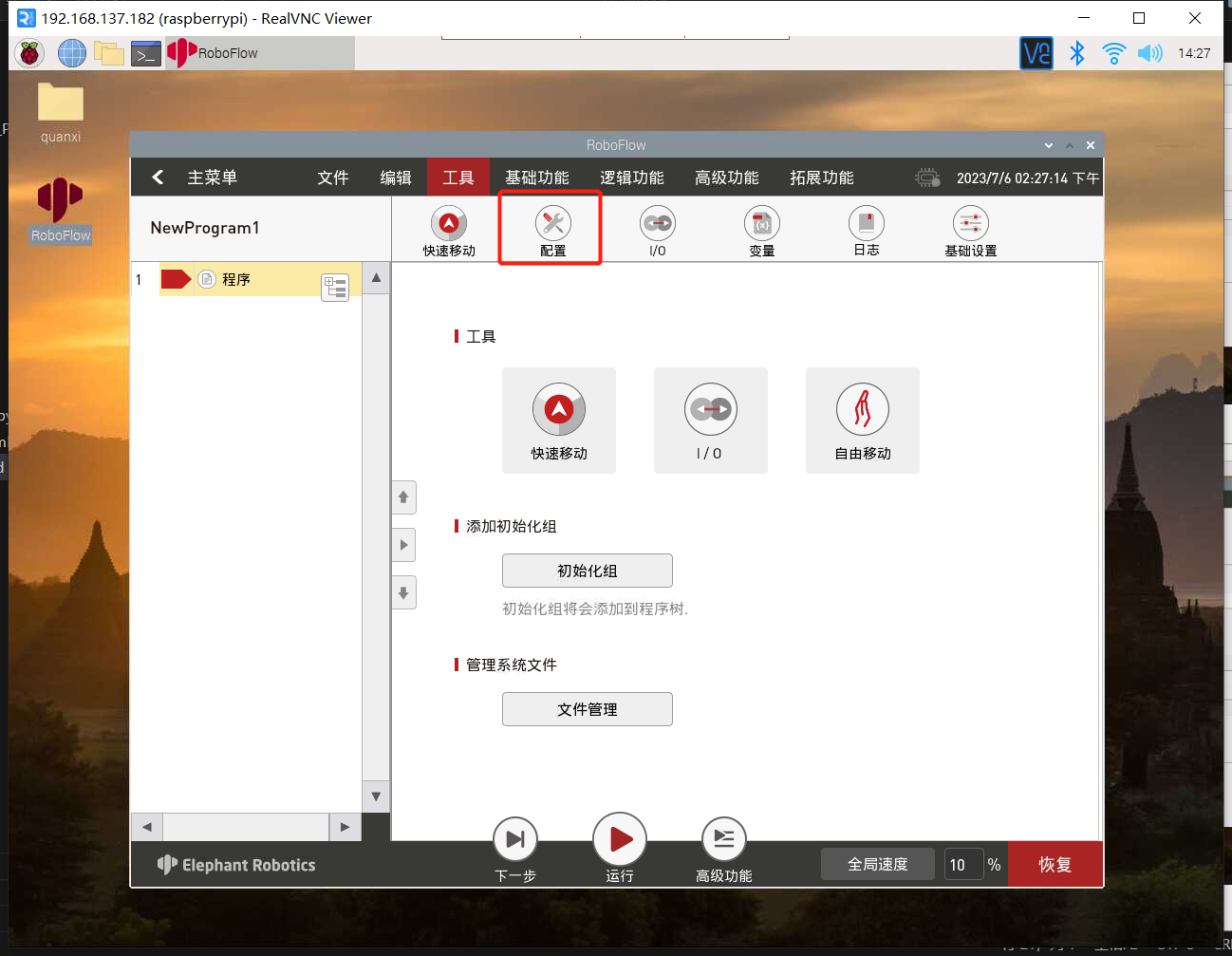
2.3检查TCP服务器是否开启
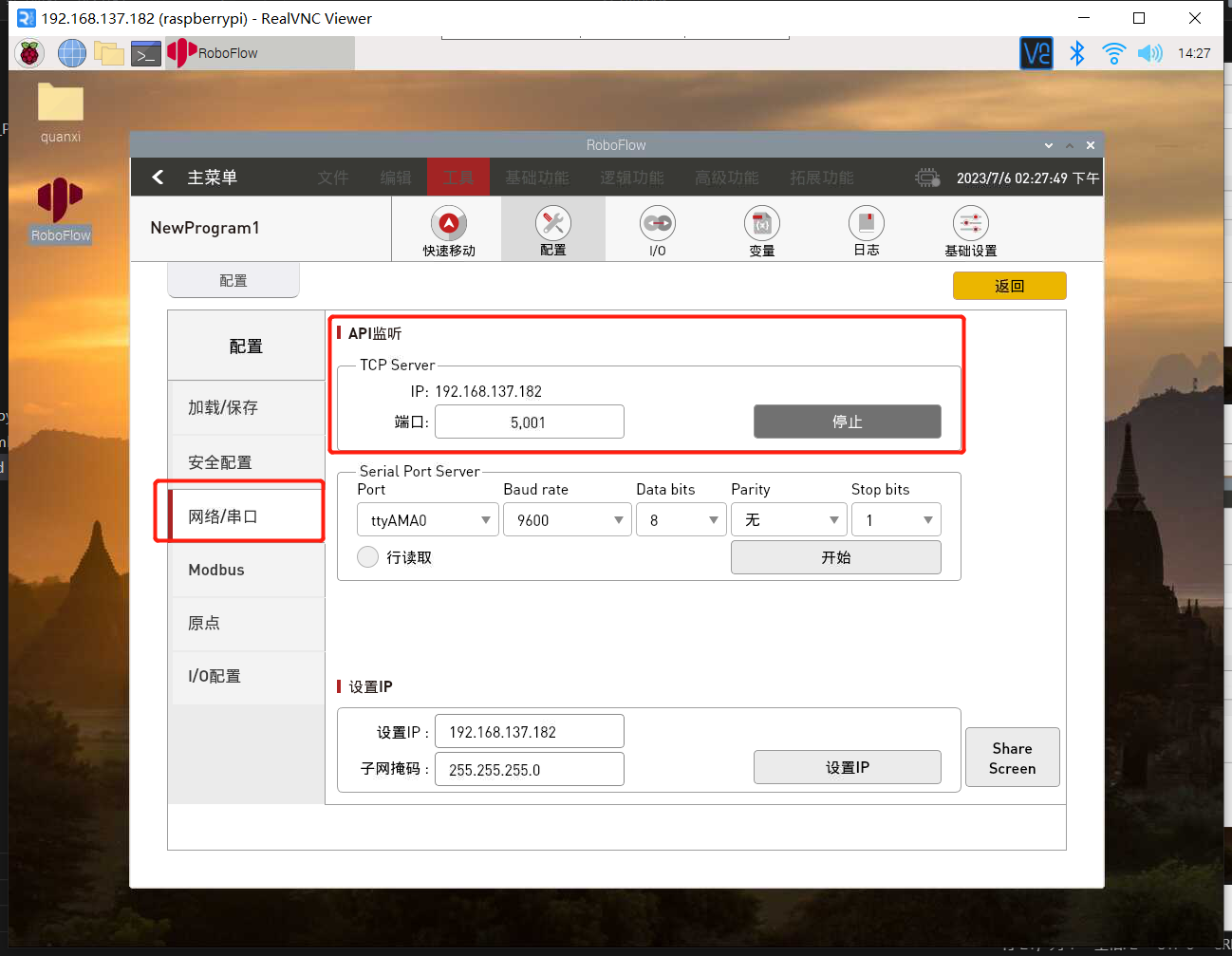
返回主菜单,点击编写程序后,再点击空白程序,进入程序编辑界面后,点击配置按钮,点击网络/串口选项,检查TCP服务器是否开启,通常情况下,TCP服务器是默认开启的,若未开启,则需手动开启

3 Python API接口说明
3.1 ElephantRobot类实列化
注意:如需控制三指与力控夹爪版本需要以630 v1.2.25.07.30版本系统,搭配v1.2.8末端固件才能正常使用v1.2的力控,v1.1版本的三指。在2025-09-15后出厂的机器可支持控制三指与力控的功能
"从pymycobot库导入ElephantRobot类"
from pymycobot import ElephantRobot
"连接机器人服务器"
elephant_client = ElephantRobot("192.168.137.182", 5001)
"开始TCP通信"
elephant_client.start_client()
使用Python API必须先将ElephantRobot类实例后才可调用mycobot pro630的功能函数
- 必填参数:
参数1:机器人实际IP地址
参数2:机器人端口(API函数端口固定为5001)
3.2功能函数介绍
def start_client(): - 功能:开启TCP连接(若要使用Python API控制机器人,必须调用此API)
- 参数:无
def stop_client():
- 功能:关闭TCP连接
- 参数:无
def send_command(command):
- 功能:发送指令给服务器
- 参数:指令(字符串类型)
def string_to_coords(data):
- 功能:字符串类型数据转列表类型数据
- 参数:字符串类型数据
def string_to_double(data):
- 功能:字符串类型数据转双精度浮点型数据
- 参数:字符串类型数据
def string_to_int(data):
- 功能:字符串类型数据转整型数据
- 参数:字符串类型数据
def invalid_coords():
- 功能:给服务器返回一个无效的笛卡尔坐标
- 参数:无
def get_angles():
- 功能:向服务器请求当前各个关节角度信息
- 参数:无
def get_coords():
- 功能:向服务器请求当前笛卡尔位姿信息
- 参数:无
def get_speed():
- 功能:向服务器请求机器人运动速率
- 参数:无
def _power_on():
- 功能:机器人上电
- 参数:无
def _power_off():
- 功能:机器人下电
- 参数:无
def check_running():
- 功能:检查机器人是否在运行
- 参数:无
def state_check():
- 功能:获取机器人状态
- 参数:无
def read_next_error(data):
- 功能:机器人错误检测
- 参数:无
def write_coords(coords,speed):
- 功能:发送整体坐标和姿态,让机械臂头部从原来点移动到指定点
- 参数:机器人笛卡尔位姿(列表类型),机械臂运动的速度:[0-6000]
def write_coord(axis, value, speed):
- 功能:发送单个坐标值给机械臂进行移动
- 参数:机器人笛卡尔位置[0代表x,1代表y,2代表z,3代表rx,4代表ry,5代表rz],要到达的坐标值,机械臂运动的速度:[0-6000]
def write_angles(angles,speed):
- 功能:发送所有角度给机械臂所有关节
- 参数:关节角度(列表类型),机械臂运动的速度:[0-5999]
def write_angle(joint, value, speed):
- 功能:发送指定的单个关节运动至指定的角度
- 参数:指定关节[0代表j1,1代表j2,2代表j3,3代表j4,4代表j5,5代表j6],关节角度,机械臂运动的速度:[0-5999]
def set_speed(percentage):
- 功能:设置速度
- 参数:目标速度
def set_carte_torque_limit(axis_str, value):
- 功能:设置机器人的扭矩限制
- 参数:x/y/z/rx /ry/rz,扭矩
def set_payload(payload):
- 功能:设置机器人的有效负载
- 参数:范围 0.0 ~ 2.0
def start_robot():
- 功能:打开使能
- 参数:无
def _state_off():
- 功能:关闭使能
- 参数:无
def task_stop():
- 功能:任务暂停
- 参数:无
def jog_angle(joint_str, direction, speed):
- 功能: 控制机器人按照指定的角度持续移动
- 参数:机械臂的关节[J1/J2/J3/J4/J5/J6],主要控制机器臂移动的方向[-1=负方向 ,0=停止,1=正方向],机器人运动的速度
def jog_coord(axis_str, direction, speed):
- 功能: 控制机器人按照指定的坐标轴方向持续移动
- 参数:笛卡尔的方向[x/y/z/rx/ry/rz],主要控制机器臂移动的方向[-1=负方向 ,0=停止,1=正方向],机器人运动的速度
def get_digital_in(pin_number):
- 功能:获取输入引脚信号
- 参数:引脚序号[0 ~ 5 对应底座电气接口 OUT 1 ~ 6 ; 16 ~ 17 对应机械臂末端电气接口 OUT 1 ~ 2]
def get_digital_out(pin_number):
- 功能:获取输出引脚信号
- 参数:引脚序号[0 ~ 5 对应底座电气接口 OUT 1 ~ 6 ; 16 ~ 17 对应机械臂末端电气接口 OUT 1 ~ 2]
def set_digital_out(pin_number, pin_signal):
- 功能:设置输出引脚信号
- 参数:引脚序号[0 ~ 5 对应底座电气接口 OUT 1 ~ 6 ; 16 ~ 17 对应机械臂末端电气接口 OUT 1 ~ 2],引脚状态[0=低电平,1=高电平]
def get_acceleration():
- 功能:获取机器人的加速度
- 参数:无
def set_acceleration(acceleration):
- 功能:设置机器人的加速度
- 参数:加速度
def command_wait_done():
- 功能:等待到上一个运动命令完成为止
- 参数:无
def wait(seconds):
- 功能:等待时长(以秒为单位)
- 参数:无
def assign_variable(var_name, var_value):
- 功能:给定义好的变量赋值
- 参数:变量名(字符串类型),目标值
def get_variable(var_name):
- 功能:获取一个变量的值
- 参数:变量名(字符串类型)
def jog_relative(joint_id, angle, speed, mode):
- 功能:以当前位置往某个坐标轴方向进行相对运动,或是以当前关节角度往某个关节的角度进行相对运动
- 参数:相对运动的方向或角度['J1'——'J6', 'X', 'Y', 'Z', 'RX', 'RY', 'RZ'],相对移动的距离或角度,移动速度,运动模式[0 或 1 ]
def set_gripper_mode(mode):
- 功能:设置自适应夹爪控制模式
- 参数:0或1,0代表透传模式,1代表IO控制模式
def set_gripper_calibrate():
- 功能:校准自适应夹爪舵机电位值
- 参数:无
def set_gripper_state(state, speed):
- 功能:设置自适应夹爪完全张开或闭合
- 参数:0或1[0代表完全张开,1代表完全闭合],速度[1-100]
def set_gripper_value(value, speed):
- 功能:设置自适应夹爪张开行程
- 参数:行程[0-100],速度[1-100]
def get_joint_current(joint):
- 功能:获取各个关节的电流
- 参数:关节[0-5]
def force_get_firmware(ID):
- 功能:获取力控夹爪固件版本
- 参数: 夹爪ID[1-254]
def force_get_modified(ID):
- 功能:获取力控夹爪固件更新版本
- 参数:夹爪ID[1-254]
def force_set_id(ID, value):
- 功能:设置力控夹爪id
- 参数:夹爪ID[1-254],修改值[1-254]
def force_get_id(ID):
- 功能:获取力控夹爪id
- 参数:夹爪ID[1-254]
def force_set_enabled(ID, value):
- 功能:设置力控夹爪使能
- 参数:夹爪ID[1-254],使能值[0或1,0代表不使能,1代表上使能]
def force_set_angle(ID, value):
- 功能:设置力控夹爪运动角度
- 参数:
- 夹爪ID[1-254]
- 角度:[0-100]
def force_get_angle(ID):
- 功能:获取力控夹爪运动角度
- 参数:夹爪ID[1-254]
def force_set_calibrate(ID):
- 功能:力控夹爪校准
- 参数:夹爪ID[1-254]
def force_get_gripper(ID):
- 功能:获取力控夹爪运动状态
- 参数:夹爪ID[1-254]
def force_set_torque(ID,value):
- 功能:设置力控夹爪扭矩
- 参数:夹爪ID[1-254],扭矩[0-100]
def force_get_torque(ID):
- 功能:获取力控夹爪扭矩
- 参数:夹爪ID[1-254]
def force_set_open(ID,value):
- 功能:设置力控夹爪IO张开角度
- 参数:夹爪ID[1-254],角度[0-100]
def force_set_close(ID,value):
- 功能:设置力控夹爪IO闭合角度
- 参数:夹爪ID[1-254],角度[0-100]
def force_set_speed(ID,value):
- 功能:设置力控夹爪运动速度
- 参数:夹爪ID[1-254],速度[0-100]
def force_get_speed(ID):
- 功能:设置力控夹爪运动速度
- 参数:夹爪ID[1-254]
def force_get_open(ID):
- 功能:获取力控夹爪IO张开角度
- 参数:夹爪ID[1-254]
def force_get_close(ID):
- 功能:获取力控夹爪IO闭合角度
- 参数:夹爪ID[1-254]
def force_set_absangle(ID,value):
- 功能:设置力控夹爪绝对角度
- 参数:夹爪ID[1-254],角度[0-100]
def hand_get_firmware(ID):
- 功能:获取三指灵巧手版本
- 参数:夹爪ID[1-254]
def hand_get_modified(ID):
- 功能:获取三指灵巧手更新版本
- 参数:夹爪ID[1-254]
def hand_set_id(ID,value):
- 功能:设置三指灵巧手ID
- 参数:夹爪ID[1-254],修改值[1-254]
def hand_get_id(ID):
- 功能:读取三指灵巧手ID
- 参数:夹爪ID[1-254]
def hand_set_enabled(ID,value):
- 功能:设置三指使能
- 参数:夹爪ID[1-254],使能[0或者1,0不使能,1上使能]
def hand_set_joint_angle(ID,jiont,value):
- 功能:设置三指灵巧手单关节运动
- 参数:夹爪ID[1-254],关节[1-6],角度[0-100]
def hand_get_joint_angle(ID,jiont,value):
- 功能:读取三指灵巧手关节角度
- 参数:夹爪ID[1-254],关节[1-6]
def hand_set_joint_calibrate(ID,jiont):
- 功能:设置三指灵巧手关节校准
- 参数:夹爪ID[1-254],关节[1-6]
def hand_get_state(ID):
- 功能:获取三指灵巧手运动状态
- 参数:夹爪ID[1-254]
def hand_set_torque(ID,jiont,value):
- 功能:设置三指灵巧手扭矩
- 参数:夹爪ID[1-254],关节[1-6],扭矩[0-100]
def hand_get_torque(ID,jiont):
- 功能:获取三指灵巧手扭矩
- 参数:夹爪ID[1-254],关节[1-6]
def hand_set_speed(ID,jiont,value):
- 功能:设置三指灵巧手速度
- 参数:夹爪ID[1-254],关节[1-6],速度[0-100]
def hand_get_speed(ID,jiont):
- 功能:获取三指灵巧手速度
- 参数:夹爪ID[1-254],关节[1-6]
def hand_set_fullangles(ID,angles, speed):
- 功能:设置三指灵巧手全关节运动
- 参数:
- 夹爪ID[1-254]
- 角度 :
- 关节1:范围0~100°
- 关节2:范围0~100°
- 关节3:范围0~100°
- 关节4:范围0~100°
- 关节5:范围0~100°
- 关节6:范围0~100°
- 速度[0-100]
def hand_get_fullangles(ID):
- 功能:获取三指灵巧手全关节角度
- 参数:夹爪ID[1-254]
def hand_set_catch(ID,pose, value, num=0):
- 功能:设置三指灵巧手手势动作
- 参数:夹爪ID[1-254],模式[0-4],阈值[0-5, 模式为4时,阈值[0-20]],空闲标志[函数带上num参数时手势运动的关节与其他关节都会移动,不加上num参数时只运动对应模式的关节]
def hand_get_model(ID):
- 功能:获取三指灵巧类型
- 参数:夹爪ID[1-254]
def get_end_firmware():
- 功能:获取630末端ATOM固件版本
- 参数:无
def get_end_modify():
- 功能:获取630末端ATOM固件更新版本
- 参数:无
def get_end_bt_status():
- 功能:获取630末端ATOM固件按键状态
- 参数:无