开机检测指南
1 安装机械臂
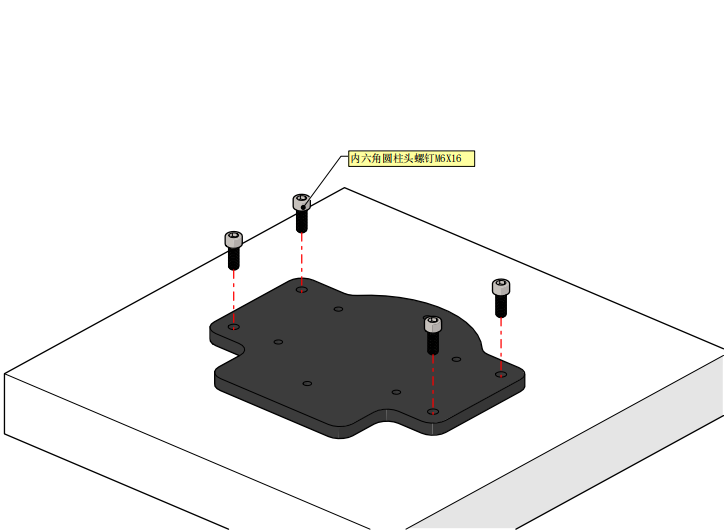
安装M6X16螺丝将底板固定在台面上
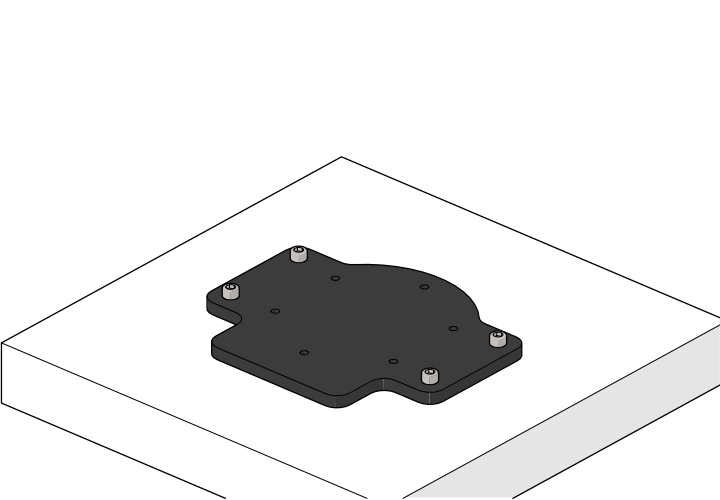
安装完成的效果图
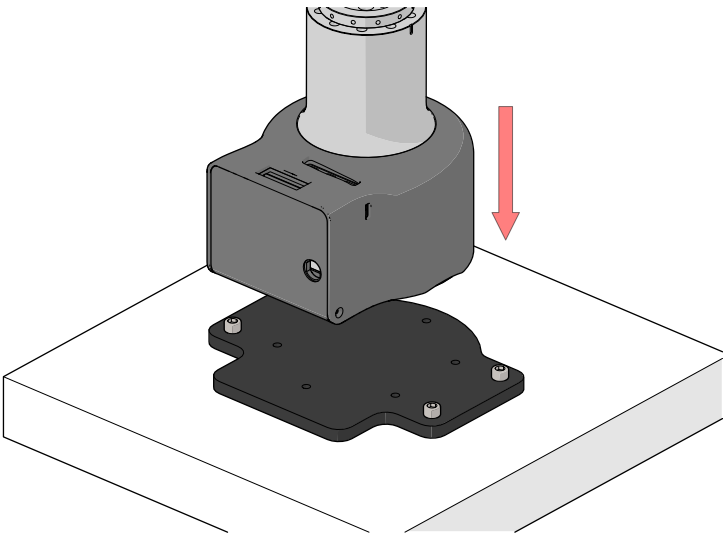
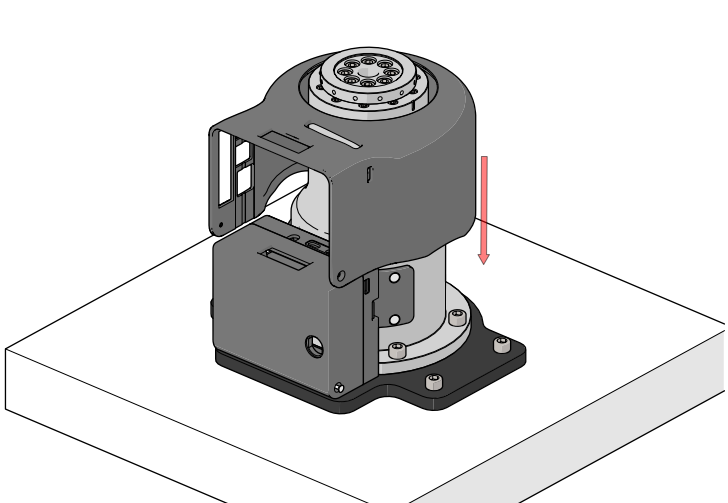
将机械臂底座放置到固定好的底板上
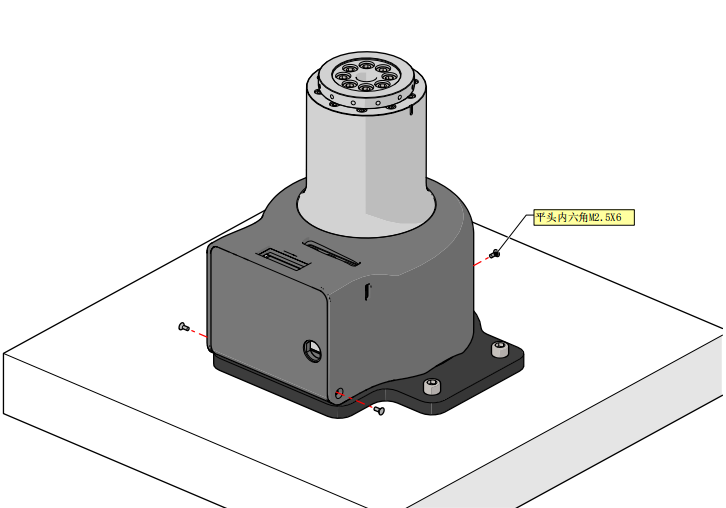
拆卸机械臂底座上的罩壳固定螺丝
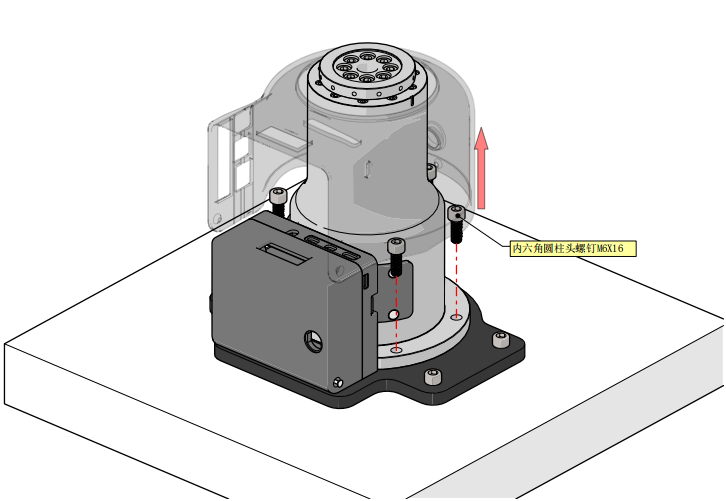
打开机械臂底座的罩壳,并使用M6X16的螺丝将机械臂底座和底板固定
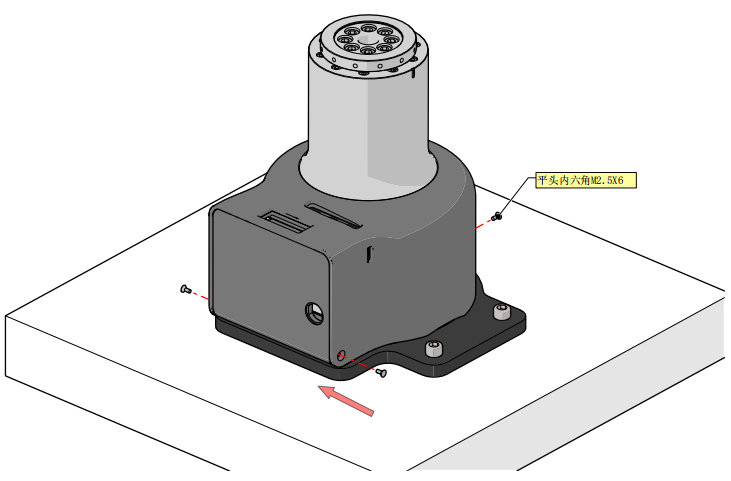
安装机械臂底座的罩壳固定螺丝
2 电源连接
在电源适配器断电的情况下,将适配器输出端与机械臂电源处连接

然后将急停旋钮接入后,顺时针旋开急停旋钮
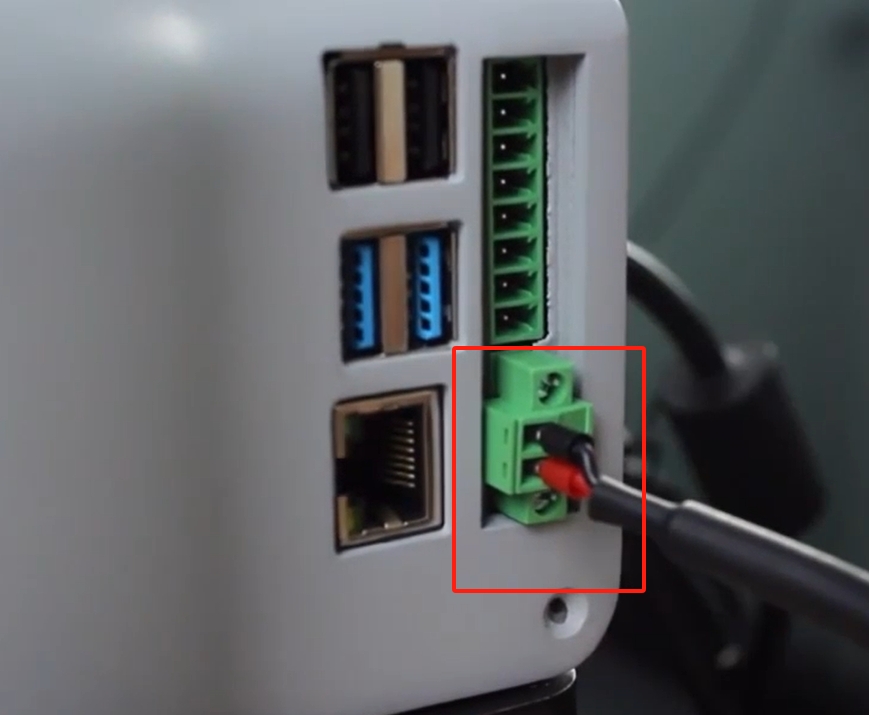
然后按下电源开关即可

3 显示模块连接
3.1 显示屏连接
准备好配件中的显示器连接线,如图2-1所示,一端为HDMI接头,一端为micro HDMI接头。
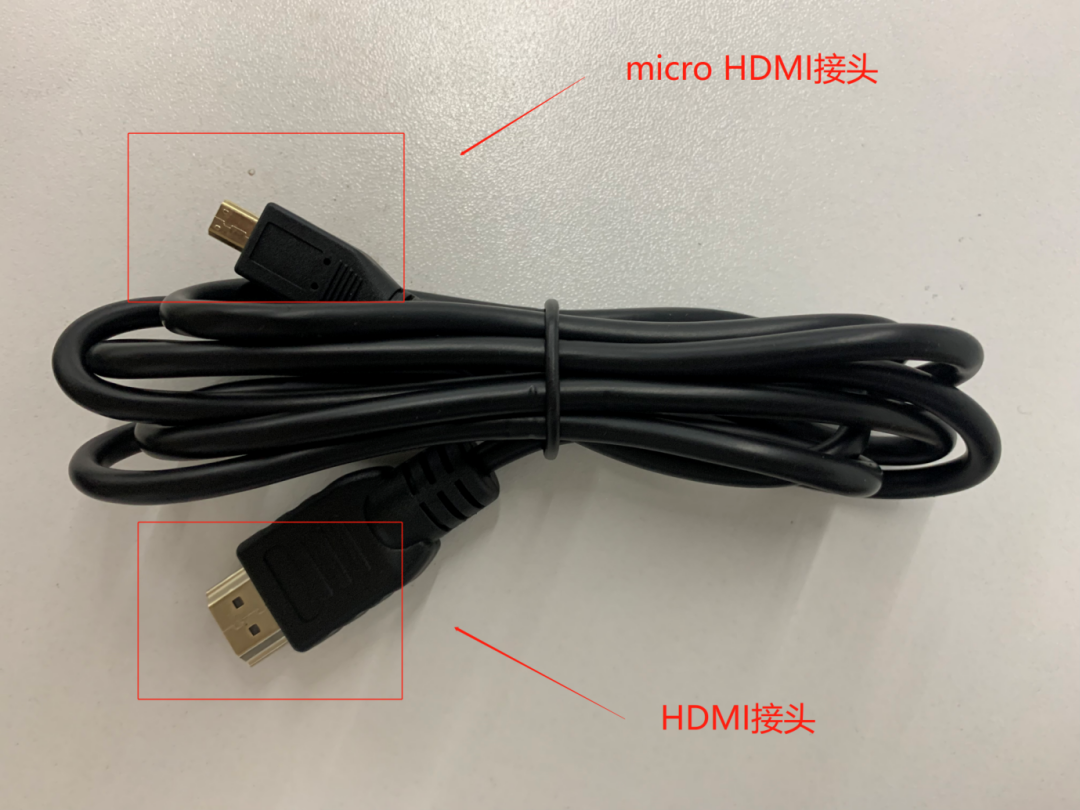
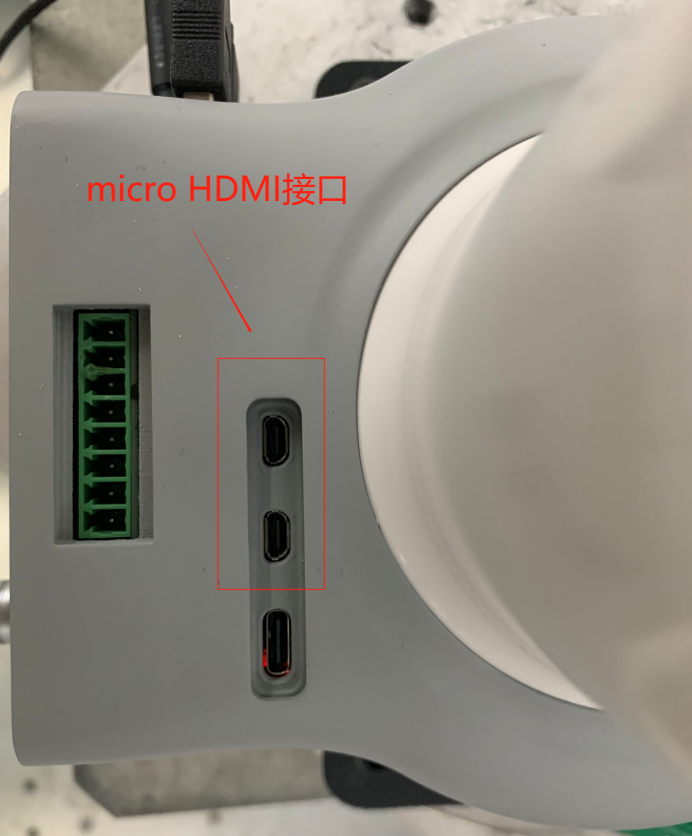
HDMI接头与电脑相连,micro HDMI接有与机器人相连,机器人接口位置如图2-2所示。连接好后给机器人上电即可显示。
3.2 远程连接
使用远程连接,必须先下载VNC Viewer 安装教程
有线连接
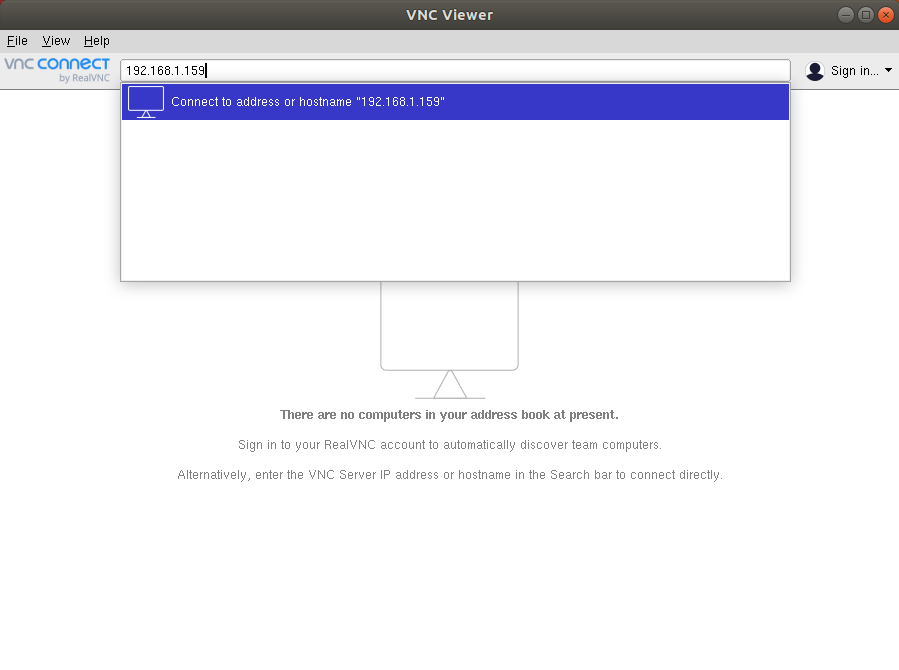
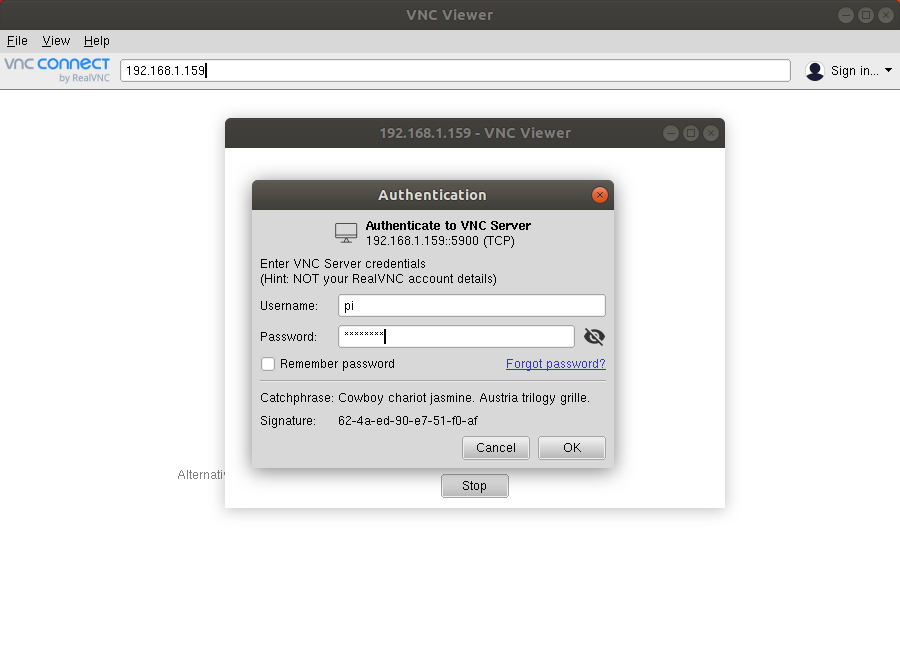
给机器人上电,使用网线连接机械臂和PC。机械臂的有线网卡静态IP为:192.168.1.159,PC的IP网段要改成1网段,在远程端打开软件“VNC Viewer”,如图2-3所示,在输入框输入机器人的IP地址,按下回车键进行连接. 网段修改教程
如图2-4所示,在弹出的认证窗口中,输入机器人端的账号和密码,默认账户名为“pi”,密码为“elephant”。输入完成后点击“OK”按钮即可连接.
无线连接
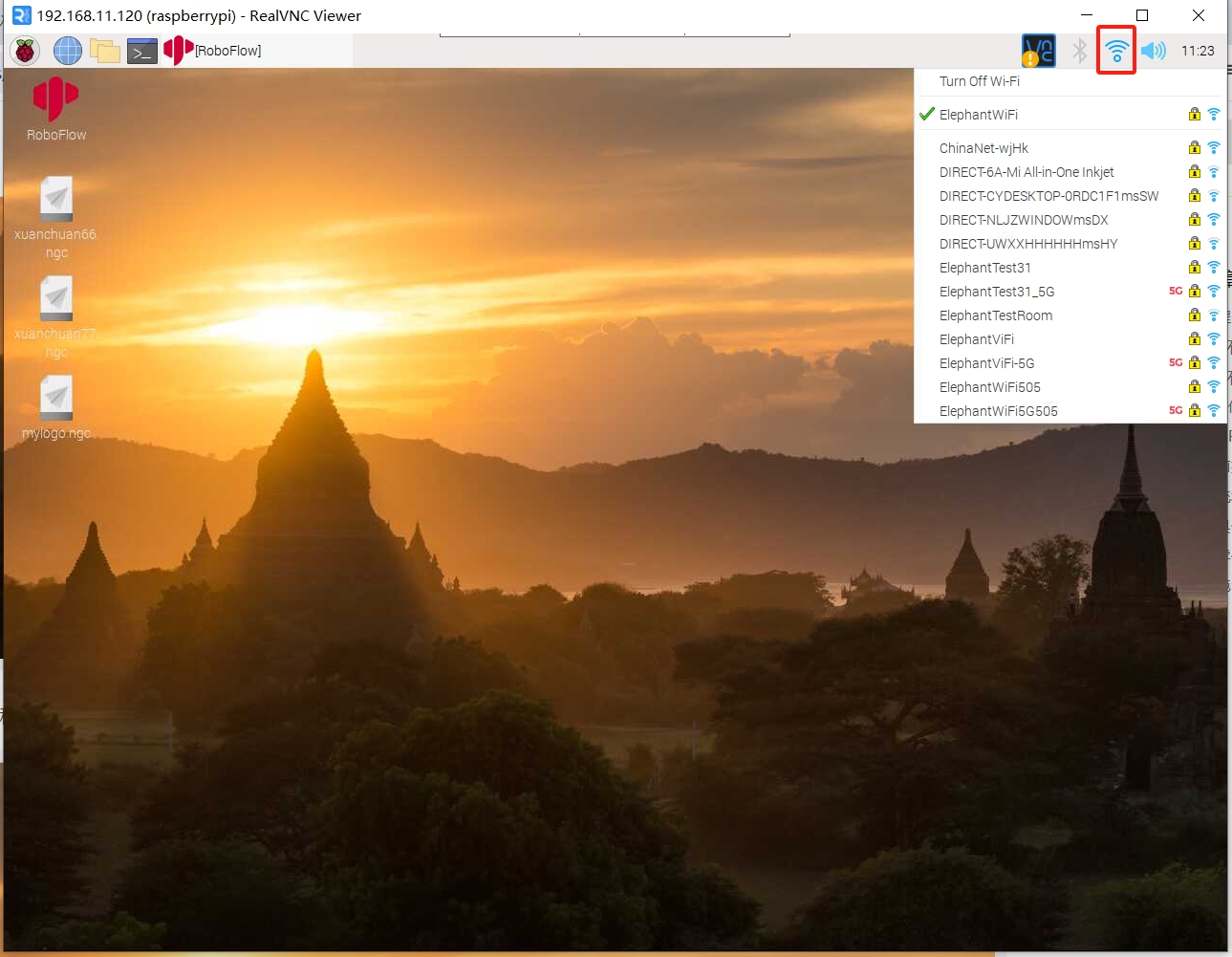
若要使用无线连接,必须先使用外接显示器或有线连接的方式先进入机器人系统,然后选择你要连接的wifi热点,输入密码连接后,查看机器人的无线IP,客户使用的电脑必须连接和机器人同一个wifi热点,打开vnc,输入机械臂的无线IP及用户名和密码后,即可远程进入机械臂的操作系统。
鼠标点击WiFi图标,即可连接需要的WiFi
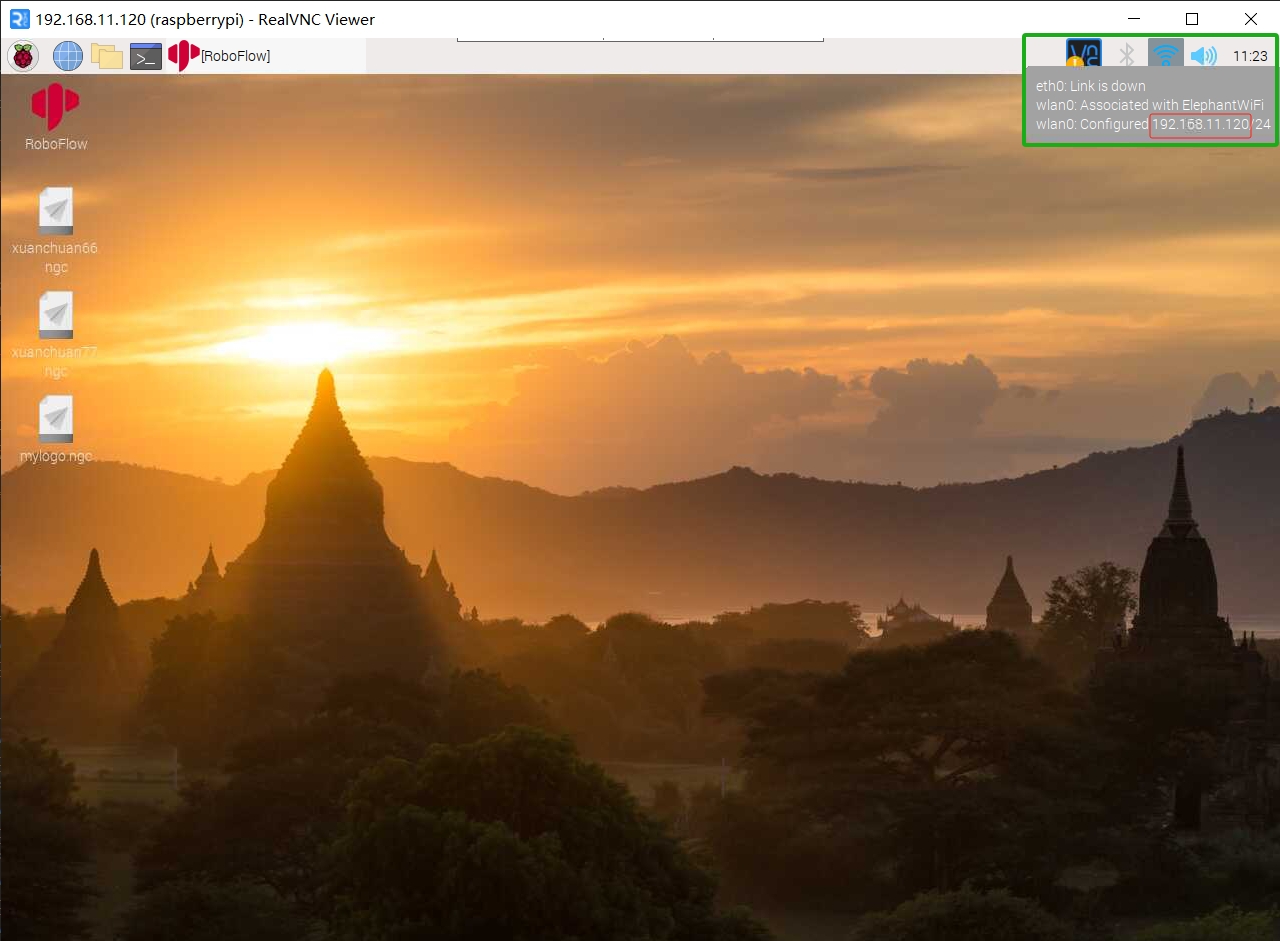
鼠标只需移动到WiFi图标,即可显示无线IP
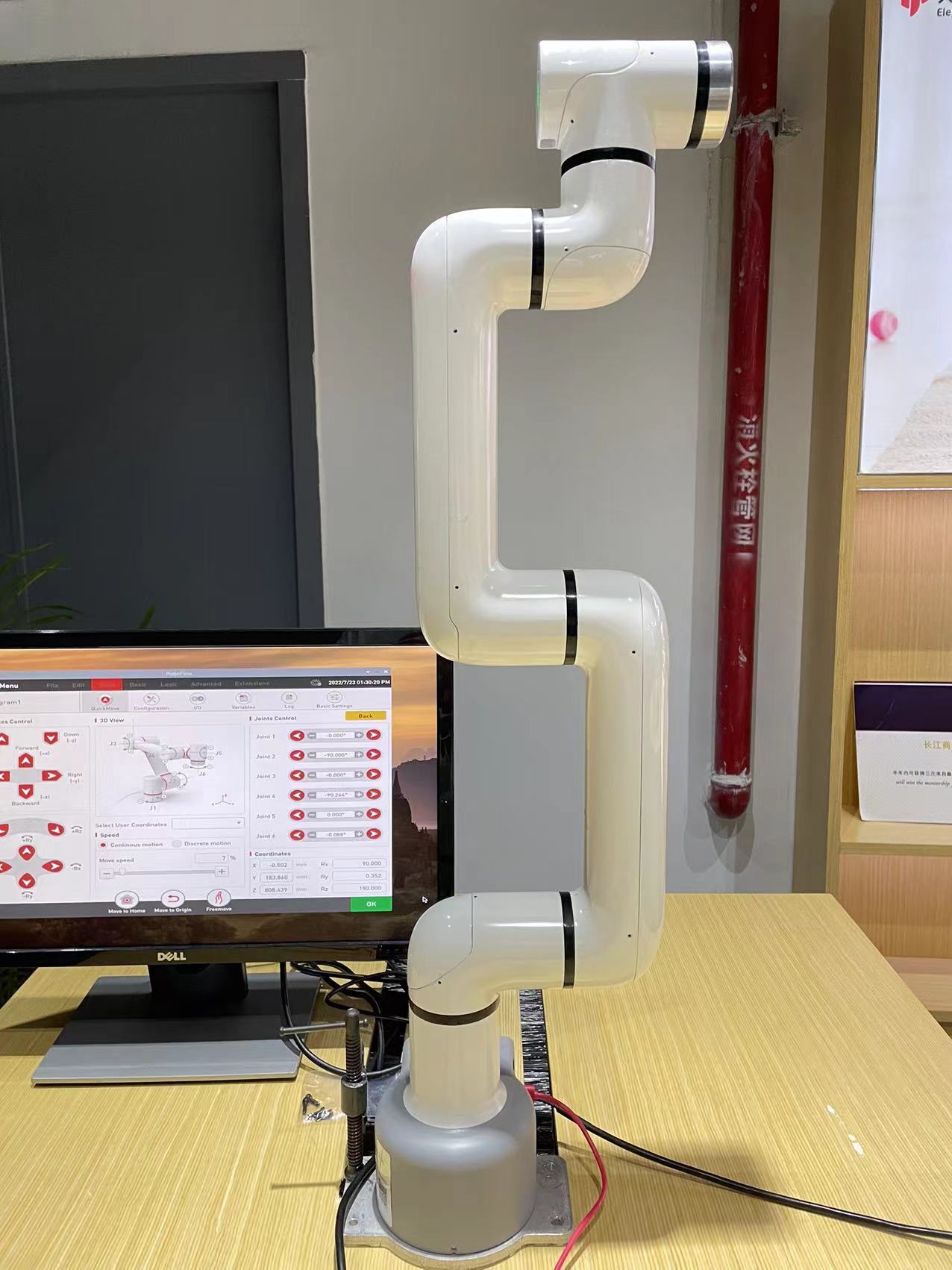
4 零位检查
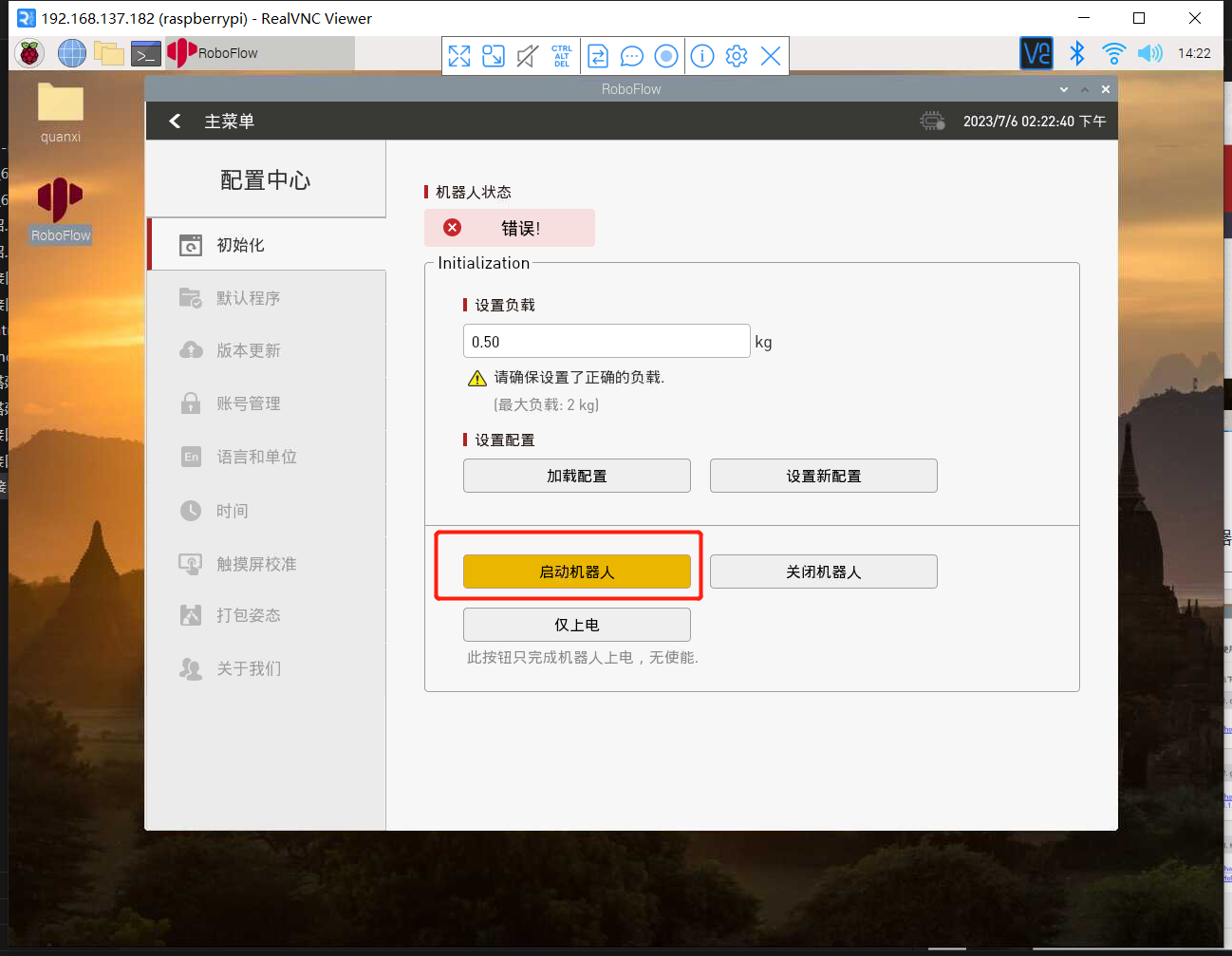
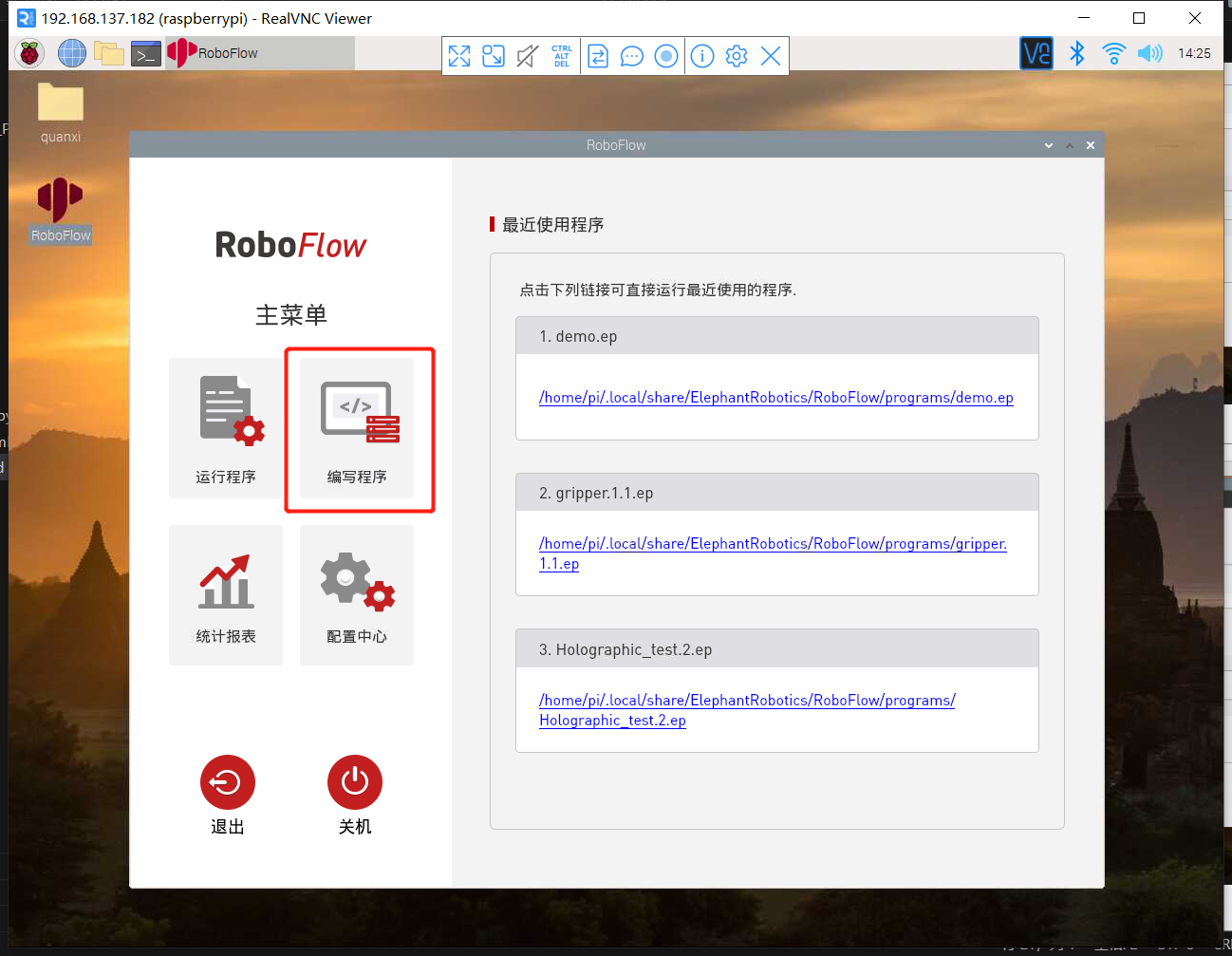
机器人上电开机后,使用VNC登录RoboFlow操作系统,密码为elephant
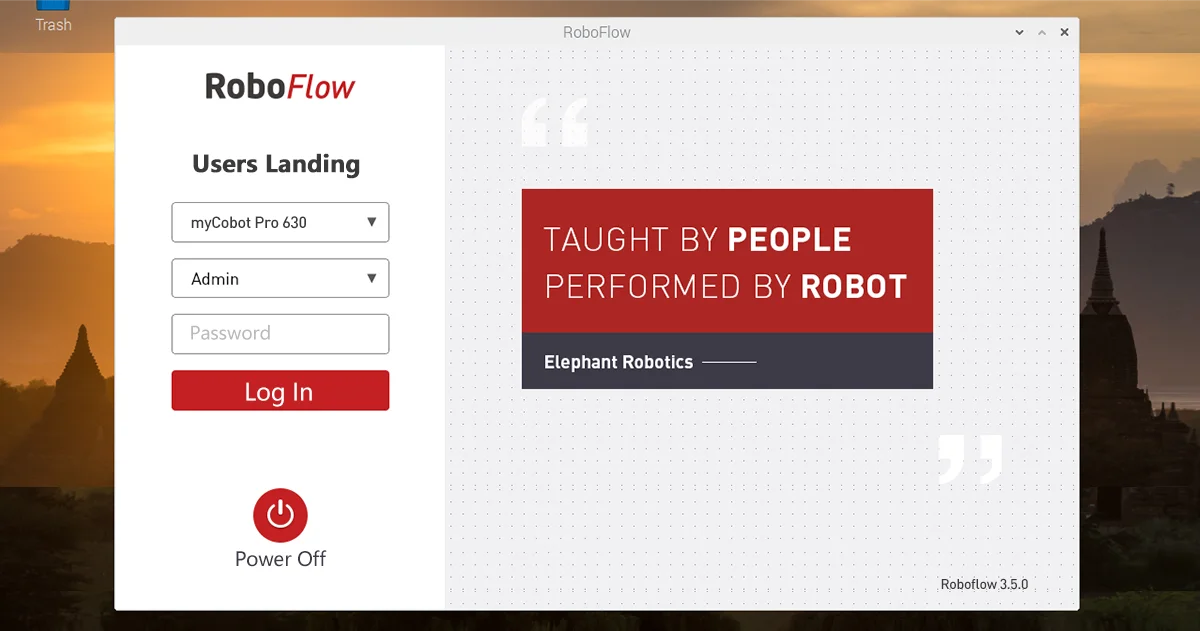
进入配置中心,点击启动机器人按钮



长按住回零按钮,机械臂每个关节会回到对应的零点

机械臂的每个关节到位后会有弹窗提醒,此时可松开回零按钮

机械臂回零后的参考姿态