Python API使用案例
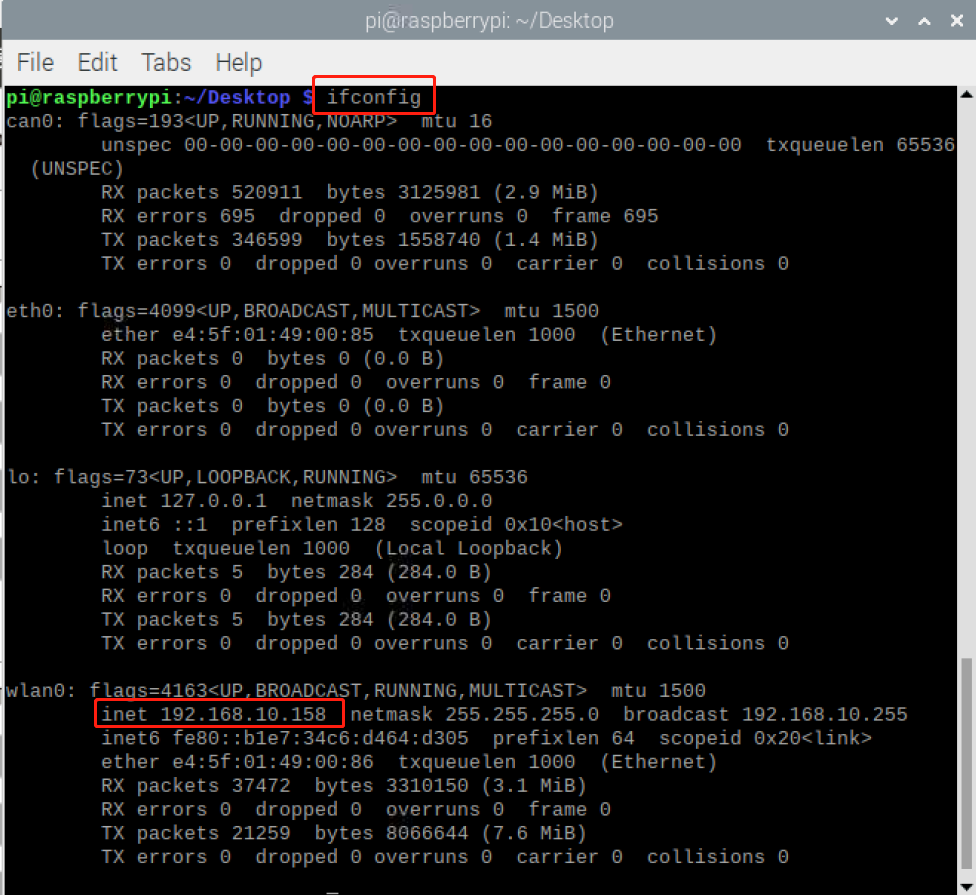
使用python API前,需先确认机器人的IP地址:在机器人终端输入 ifconfig 获取
1 机器人使能控制
1.1 机器人打开使能
from pymycobot import ElephantRobot
import time
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
"给机器人使能"
elephant_client.start_robot()
time.sleep(3)
1.2 机器人关闭使能
from pymycobot import ElephantRobot
import time
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
"关闭机器人使能"
elephant_client._state_off()
time.sleep(3)
1.3 机器人仅上电
from pymycobot import ElephantRobot
import time
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
"机器人上电"
elephant_client._power_on()
time.sleep(3)
1.4 机器人仅下电
from pymycobot import ElephantRobot
import time
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
"机器人下电"
elephant_client._power_off()
time.sleep(3)
2 关节控制
使用VNC Viewer进入RoboFlow系统后,在快速移动界面下,可通过关节控制,控制机器人到达目标位置后,记录操作面板上显示的机器人6个关节的角度

2.1 单关节控制
from pymycobot import ElephantRobot
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
"填入要控制的单个关节的角度,第1个参数0为第一轴,以此类推;第2个参数表示关节角度;第三个参数表示运动速度"
elephant_client.write_angle(0,94.828,1000)
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
2.2 多关节控制
from pymycobot import ElephantRobot
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
"在列表内填入记录下的6个关节角度,最后一个参数为运动速度,需更改为自己设定的关节角度"
elephant_client.write_angles([94.828,-143.513,135.283,-82.969,-87.257,-44.033],1000)
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
2.3 关节角度获取
from pymycobot import ElephantRobot
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
"打印机器人当前6个关节角度信息"
print(elephant_client.get_angles())
2.4 机器人关节回到零位
from pymycobot import ElephantRobot
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
"在列表内填入6个关节零位角度,最后一个参数为运动速度"
elephant_client.write_angles([0,-90,0,-90,0,0],1000)
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
3 坐标控制
主要用于实现智能规划路线让机械臂从一个位置到另一个指定位置。分为[x,y,z,rx,ry,rz],其中[x,y,z]表示的是机械臂末端在空间中的位置(该坐标系为直角坐标系),[rx,ry,rz]表示的是机械臂末端在该点的姿态(该坐标系为欧拉坐标) 使用VNC Viewer进入RoboFlow系统后,在快速移动界面下,可通过笛卡尔坐标控制,控制机器人到达目标位置后,记录操作面板上显示的机器人6个坐标值
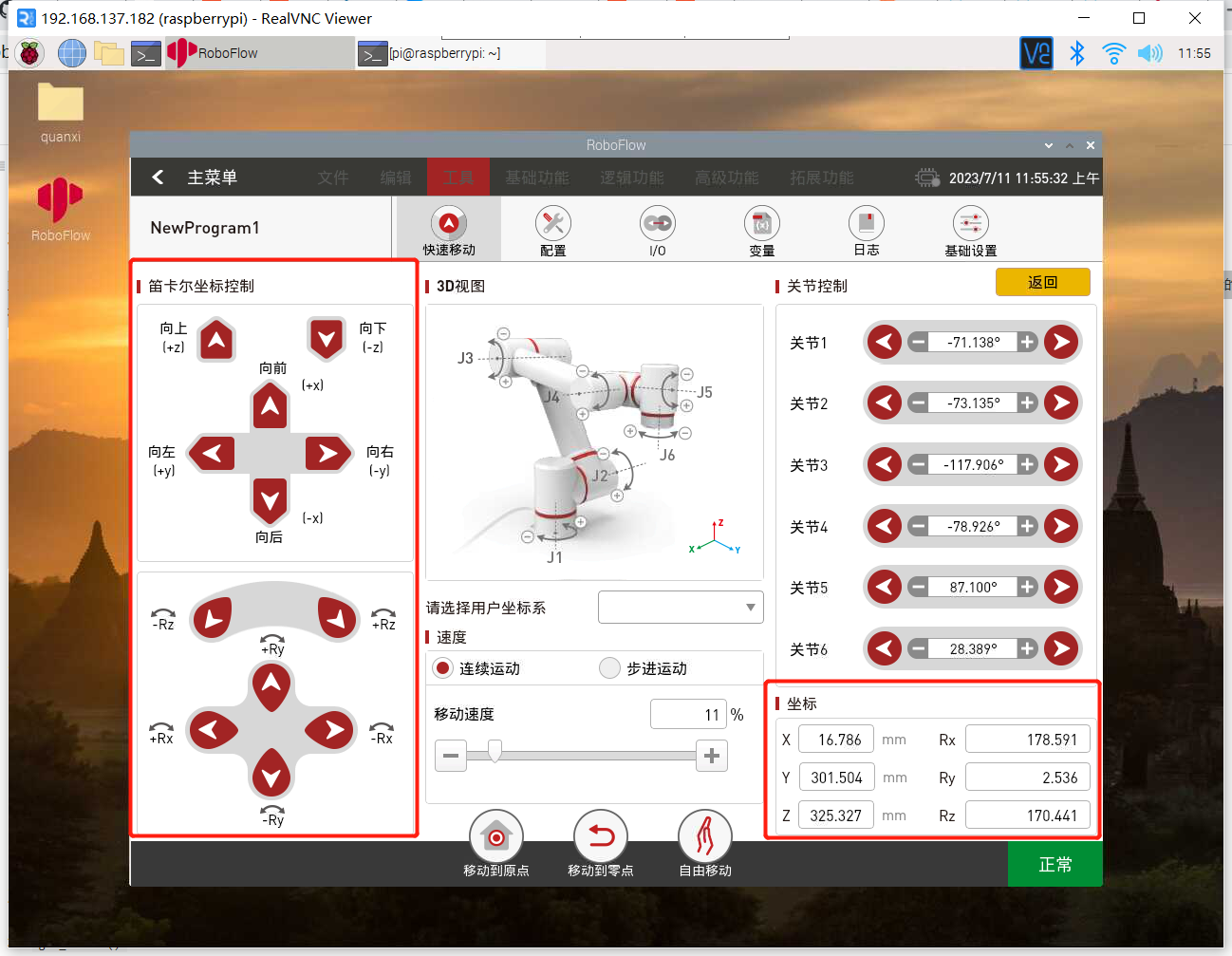
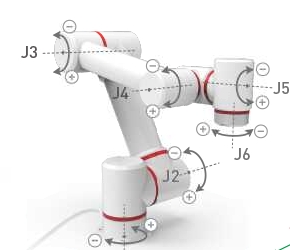
使用坐标控制需要先用关节运动将机械臂调整至下图姿态,避免奇异点导致机械臂无法执行动作
3.1 单参数坐标控制
from pymycobot import ElephantRobot
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
"填入参数,第1个参数的2代表Z轴方向,以此类推;第2个参数表示关坐标值;第三个参数表示运动速度"
elephant_client.write_coord(2,94.828,3000)
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
3.2 多参数坐标控制
from pymycobot import ElephantRobot
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
"在列表内填入记录下的6个坐标值,最后一个参数为运动速度,,需更改为自己设定的位姿"
elephant_client.write_coords([-130.824,256.262,321.533,176.891,-0.774,-128.700], 3000)
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
3.3 笛卡尔坐标获取
from pymycobot import ElephantRobot
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
"打印输出机器人当前笛卡尔空间坐标信息"
elephant_client.get_coords()
4IO控制
4.1 设置IO引脚输出状态
from pymycobot import ElephantRobot
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
"引脚序号0 ~ 5对应底座电气接口OUT 1 ~ 6 ; 16 ~ 17 对应机械臂末端电气接口 OUT 1 ~ 2"
"控制机器人OUT1输出为高电平"
elephant_client.set_digital_out(0,1)
"机器人延时3秒后再执行后面程序"
elephant_client.wait(3)
"控制机器人OUT1输出为低电平"
elephant_client.set_digital_out(0,0)
"机器人延时3秒后再执行后面程序"
elephant_client.wait(3)
4.2 获取IO引脚输出状态
from pymycobot import ElephantRobot
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
"引脚序号0 ~ 5对应底座电气接口OUT 1 ~ 6 ; 16 ~ 17 对应机械臂末端电气接口 OUT 1 ~ 2"
"获取机器人OUT1输出状态"
elephant_client.get_digital_out(0)
"机器人延时0.5秒后再执行后面程序"
elephant_client.wait(0.5)
4.3 获取IO引脚输入状态
from pymycobot import ElephantRobot
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
"引脚序号0 ~ 5对应底座电气接口OUT 1 ~ 6 ; 16 ~ 17 对应机械臂末端电气接口 OUT 1 ~ 2"
"获取机器人IN1输入状态,低电平有效,即GND与输入端导通时反馈1,其余状态反馈0"
elephant_client.get_digital_in(0)
"机器人延时0.5秒后再执行后面程序"
elephant_client.wait(0.5)
5 自适应夹爪控制
from pymycobot import ElephantRobot
import time
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
time.sleep(1)
"夹爪设置透传模式"
elephant_client.set_gripper_mode(0)
time.sleep(1)
"夹爪完全张开"
elephant_client.set_gripper_state(0,100)
time.sleep(2)
"夹爪完全闭合"
elephant_client.set_gripper_state(1,100)
time.sleep(2)
"夹爪张开到指定行程,这里张开到夹爪行程的一半"
elephant_client.set_gripper_value(50,100)
time.sleep(2)
6 电动夹爪
from pymycobot import ElephantRobot
import time
if __name__ == '__main__':
"将ip更改成Pro 630的实际ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
time.sleep(1)
"初始化电动夹爪"
elephant_client.init_ele_gripper()
time.sleep(1)
"张开"
elephant_client.set_ele_gripper_open()
time.sleep(2)
"闭合"
elephant_client.set_ele_gripper_close()
7 相对运动
from pymycobot import ElephantRobot
import time
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.10.158", 5001)
"启动机器人必要指令"
elephant_client.start_client()
time.sleep(1)
"机器人以当前坐标位置往Z方向正方向整体运动50mm"
elephant_client.jog_relative("Z",50,1500,0)
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
"机器人以当前J6关节角度增加10度"
elephant_client.jog_relative("J6",10,1500,1)
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
8 机器人夹爪搬运木块案例
from pymycobot import ElephantRobot
import time
if __name__=='__main__':
"将ip更改成P600树莓派的实时ip"
elephant_client = ElephantRobot("192.168.137.182", 5001)
"启动机器人必要指令"
elephant_client.start_client()
time.sleep(1)
"夹爪设置透传模式"
elephant_client.set_gripper_mode(0)
time.sleep(1)
"夹爪完全张开"
elephant_client.set_gripper_state(1,100)
time.sleep(1)
for i in range (1):
"机器人关节运动到安全点,需更改为自己设定的关节角度"
elephant_client.write_angles([94.828,-143.513,135.283,-82.969,-87.257,-44.033],1000)
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
"机器人笛卡尔运动到码垛抓取过渡点,需更改为自己设定的位姿"
elephant_client.write_coords([-130.824,256.262,321.533,176.891,-0.774,-128.700], 3000)
elephant_client.command_wait_done()
"机器人以当前坐标位置往Z轴负方向整体运动100mm,到达木块抓取位置"
elephant_client.jog_relative("Z",-100,1500,1)
elephant_client.command_wait_done()
"控制夹爪闭合到30mm"
elephant_client.set_gripper_value(30,100)
"控制机器人等待1秒后再动作"
elephant_client.wait(1)
"机器人以当前坐标位置往Z轴正方向整体运动100mm,到达木块抓取过渡点"
elephant_client.jog_relative("Z",100,1500,0)
elephant_client.command_wait_done()
"机器人以当前坐标位置往Y轴正方向整体运动300mm,到达木块放置过渡点"
elephant_client.jog_relative("Y",300,1500,0)
elephant_client.command_wait_done()
"机器人以当前坐标位置往Z轴负方向整体运动100mm,到达木块放置位置"
elephant_client.jog_relative("Z",-100,1500,0)
elephant_client.command_wait_done()
"控制夹爪完全张开"
elephant_client.set_gripper_value(100,100)
"控制机器人等待1秒后再动作"
elephant_client.wait(1)
"机器人以当前坐标位置往Z轴正方向整体运动100mm,到达木块放置过渡点"
elephant_client.jog_relative("Z",100,1500,1)
elephant_client.command_wait_done()
"机器人关节运动到安全点"
elephant_client.write_angles([94.828,-143.513,135.283,-82.969,-87.257,-44.033],1000)
elephant_client.command_wait_done()